
和声搜索改进的形态学分析在库区漂浮物体量预估中应用的研究
2022-11-08 05:43花胜强郑慧娟
水力发电 2022年9期
花胜强,陈 意,郑慧娟,袁 帅,高 磊
(南瑞集团(国网电力科学研究院)有限公司,江苏南京211106)
0 引 言
随着我国制造产业的迅猛发展,人民群众生活水平的飞速提升,以及水利水电建设的大规模开展,水电厂、水利枢纽的库区开始出现和聚集大量的漂浮物,其成分主要包含生活垃圾、工业废弃物及树干枝叶等。由于水电厂或水利枢纽一般承担着防洪、供水、发电、航运及旅游等社会和民生功能,防漂浮物的存在不仅对运管单位的水工设施、交通安全、机电设备等造成危害,更会污染水体,破坏地区生态环境,因此,及时地监控、估算库区漂浮物,从而合理制定和安排漂浮物清除作业,无疑具有极其重要的经济和安全效益[1-3]。
当前,对于库区漂浮物的实时监测主要依赖人工巡检及机器视觉等方式。人工巡检实施简单但耗费人力,也无法实现实时监测,对于当前漂浮物的体量难以量化预估,不利于后续组织安排清除作业船只。基于远程摄像的机器视觉是一种借助图形图像处理方法进行成像中目标物检测、分割和识别的技术,具备自动化、智能化等特性,是进行库区漂浮物在线监控和分析的良好途径。已有文献提出基于图像灰度和边缘曲线的BP神经网络用于树枝和漂浮瓶的判别模型,基于Faster R-CNN、R-FCN和SSD等多种深度学习网络用于落叶和水草的目标检测,以及基于AlexNet卷积神经网络用于水面塑料制品的识别等,均取得了一定的识别效果[4-5]。
BP神经网络及深度学习算法关于复杂非线性映射关系良好的拟合能力,在图形图像分析识别中确实具有一定的优势,但其限制条件也很显著,如网络模型的精度是由数据驱动的,需要大样本的漂浮物图像集并一一加以标注,数据预处理工作量巨大;网络模型的结构设计困难且复杂,模型超参数量巨大且不易设定,模型训练耗时耗资源,导致产出门槛较高等[6]。
针对以上问题,本文提出了一种库区漂浮物体量预估的方法,首先在完成图像预处理后,进行样本图像中漂浮物目标区域的人工标注;其次,基于形态学方法生成每个样本图像的梯度特征空间;然后,基于滑动梯度卷积及和声搜索算法进行漂浮物识别模型的训练和优化,并产出库区漂浮物图像识别模型;最后,根据预定义的像素面积比、漂浮物平均厚度、漂浮物平均密度等参数,给出库区漂浮物的面积、体积和质量的预估,以便于后续管理单位的船舶清除调度安排。由于是基于样本图像的梯度特征空间进行模型的学习训练,故该方法只需小样本量即可生成较高精度的漂浮物识别模型,无论是在样本获取、样本预处理还是模型训练的时间和空间资源消耗等环节,其工作效率都比较高[6]。
1 基于内容的图像压缩
当前图像进行识别前通常要求压缩到指定尺寸上,如果原图与指定尺寸的宽高比差异较大,会导致图像内容发生形变失真;另外,图像中的目标区域也可能跟随着图像压缩处理而同步损失,从而丢失了宝贵的目标内容信息。由此,本文中提出一种基于内容的图像压缩改进算法,以尽可能保持原图像中含有重要信息区域的比例,从而避免缩放造成的失真。
1.1 算法原理
当前常用的图像压缩算法,是类似于沿着图像横向或者纵向做均匀等间隔的降采样。此法虽然逻辑上简单明了,但也造成了无差别的内容裁减。由此,本文提出基于图像能量,而非均匀等间隔选点的策略来确定待压缩路径集合。
首先,定义图像中某点P的能量,即
(1)
其次,定义图像中的一条路径为如下所述图像点的集合,即从图像的顶部或者左侧的任意一点开始,依次向下或者向右相邻的3个点中择一移动,如此重复移动,直至达到图像最底部或者最右侧,则所有选择遍历过的图像点即组成一条路径。
再次,定义路径的能量,即为该路径上所有像素点的能量之和。
最后,可得出本算法的目标为,每次找到能量最小的一条路径,然后删除此路径上所有像素点,如此循环迭代,直至达到压缩尺寸为止。
1.2 算法流程
该算法流程如下:
(1)根据原图尺寸和压缩后的目标尺寸,确定横向与纵向各需要循环的次数。
(2)计算图像中每个像素点的能量。
(3)基于求解矩阵最短路径的动态规划算法,找出图像当前横向或纵向方向上的能量最小的路径。
(4)移除最小路径上所有像素点,得到新图像。
(5) 重复步骤(2)至步骤(4),直到新图像横向与纵向都达到目标尺寸为止。
2 形态学分析
2.1 分析流程
形态学分析通常基于数学工具从图像中提取出表达和描绘区域形状特征的图像分量,其基本运算包括腐蚀和膨胀、开运算和闭运算、形态学梯度、空间变换等等。由此,本文提出基于形态学分析的库区漂浮物识别方法流程如下:
(1)能量矩阵生成。基于公式(1)定义的图像点能量定义,生成与原图像素点一一对应的二维能量矩阵。显然,能量矩阵的尺寸与原图一致,矩阵中每个元素值代表了原图中相应位置像素点的能量。
(2)能量矩阵分块与选择。首先,基于给定尺寸的滑动窗口,将能量矩阵分割成多个窗口大小的矩阵块,并计算每个矩阵块的能量,其中,矩阵块能量即为块内各个元素值之和;然后,基于给定的能量阈值,选择所有能量不低于阈值的矩阵块并加以标注。
(3)目标矩阵块形态学处理。将上步中标注的目标矩阵块,基于指定的尺寸分别进行腐蚀、膨胀处理,以消除目标矩阵块所构成的整体识别区域内部中的气泡、区域边缘的毛刺等,使得整体的识别区域得到更好的内部连通性与边缘平滑性。
(4)目标块联通化识别与过滤。首先,将各目标矩阵进行联通化分析和识别,以将所有相连的矩阵块合并成一个整体区域。其次,基于指定的最小区域尺寸阈值,去除尺寸过小的识别区域,以减少图像中噪音部分的干扰,提高识别的准确率。
2.2 基础参数
根据上述流程可知,形态学分析共含有6个基础参数,包括分割能量矩阵的滑动窗口像素尺寸(窗口高WH、宽WL)、选择矩阵块的最小能量阈值E、对矩阵块进行腐蚀操作的像素尺寸C、对矩阵块进行膨胀操作的像素尺寸S、单堆漂浮物的最小区域像素尺寸A。显而易见,这些参数的取值设定会直接决定图像中漂浮物区域识别的精度高低,而各个参数取值的排列组合的复杂度,导致寻找出最优参数取值组合近似为NP问题,故考虑采用基于群体仿生智能的启发式搜索算法,来寻找基础参数的最优取值组合。
3 和声搜索算法
3.1 算法原理
和声搜索算法是一种借鉴了乐队进行音乐创作过程的启发式全局搜索算法,在多个组合优化领域中得到了成功应用,并展示出了较传统群体智能仿生算法更好的寻优能力和运算性能。乐队创作时,每位乐师演奏一种乐器,所有乐器的演奏加起来对应一组和声,乐师们会不断调整各自演奏的音调,以求达到整体最好的和声效果。和声搜索算法正是基于此原理,将各乐器视为优化问题中的决策变量,各乐器发出的音调视为变量取值,各乐器音调组合成的和声视为一组解向量,乐师们对和声的评价视为优化问题中目标函数对解向量好坏的评估。和声算法的最优化过程,就是对每一组和声进行评价,如果达不到要求,各乐器就继续各自调整音调,直到得到一组满意的和声为止[7]。
3.2 算法流程
和声搜索算法包含如下几个基本参数:①和声库大小,表征用于存储候选最优和声的记忆库的大小。②和声库取值概率,表征每次迭代时候直接从和声库中选择的可能性,否则就按照各决策变量的取值范围构成的解空间,随机生成一组和声。③微调概率,表征当直接从记忆库中选择和声时候,对选中的和声中各个变量取值再进行微调的概率。④微调带宽,表征当要对选中的和声进行微调时的调整幅度大小。⑤最大迭代次数,表征上述整个寻优调整过程最大迭代的次数。和声搜索算法流程如图1所示。
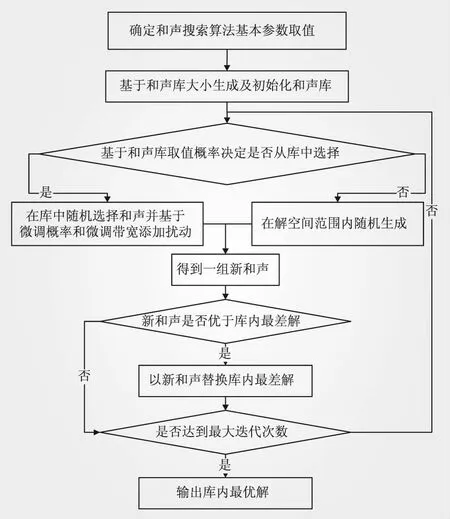
图1 和声搜索算法流程
3.3 算法参数分析与设置
和声搜索算法基本参数的取值,直接关系到后续算法寻优的精度和性能,而其中和声库取值概率、微调概率、微调带宽更是尤为重要,现将此3个参数的取值策略分析如下:
(1)和声库取值概率,当取值较大时,有利于局部解空间内的最优值搜索收敛,而取值较小时,有利于增加候选最优和声的多样性,防止陷入局部最优的早熟,故可以采取动态更新策略,算法启动时取值较小以增大搜索的多样性,随着迭代次数增加而逐渐扩大,以便更聚焦最优局部空间内寻优,其概率取值为
(2)
式中,m为最大迭代次数;i为当前寻优迭代的次数;Pi为第i次时的和声库取值概率;Ps为初始的和声库取值概率取值;Pe为最终的和声库取值概率取值。
(2)微调概率,与和声库取值概率恰好相反,取值较大时利于搜索的多样性,较小时利于局部寻优收敛,故仍可以采取动态更新策略,算法启动时取较大值以增大搜索的多样性,随着迭代次数增加而逐渐减小,其概率取值为
(3)
式中,Qi为第i次时的微调概率;Qs为初始微调概率值;Qe为最终微调概率值。其他含义同上。
(3)微调带宽,原始和声搜索算法中一般取固定值,即各个决策变量的微调带宽取值初始化设定后,运行过程中将不再改变,本文仍然考虑动态取值策略,其带宽取值为
(4)
式中,Ri为第i次时的微调带宽;R为初始设定带宽;Ran(-1,1)为位于区间[-1,1]内的随机浮点数。
4 方法流程
4.1 图像预处理
和声搜索改进的形态学分析在库区漂浮物体量预估中的应用流程详细步骤说明如下[8-9]:
(1)图像压缩。基于本文提出的压缩算法,将所有样本图像压缩至指定尺寸,以便于后续统一的图像分析处理,并极大地降低分析计算量。
(2)灰度转换与目标区域标注。将压缩后的样本图像统一变换为灰度图,变换方法如下
Gray=(38R+75G+15B)≫7
(5)
式中,Gray为图像中某像素点转换后的灰度值;R为该像素点在原图像RGB空间中的红色分量值;G为绿色分量值;B为蓝色分量值。同时,将图像中的所有漂浮物区域进行标注,并记录下区域坐标集合,以便后续识别学习时进行精度判定。
4.2 模型训练
(1)基于和声搜索算法进行形态学分析模型的训练。对于形态学分析中涉及到的基础算法参数,则基于和声搜索算法进行各参数最优化取值组合的自动化寻优;作为优化目标的损失函数,定义为形态学分析出的漂浮物区域,与标注的漂浮物区域相差异的总像素点数。显然,差异点总数越小,当前的形态学分析基础参数取值组合的分析精度越高。
(2)得到和声搜索改进的库区漂浮物形态学分析识别模型并进行体量预估基于和声搜索算法的训练完成后,得到最终的形态学分析模型,模型输出内容即为输入图片中判定为漂浮物区域的总像素点数N,以及相应的像素点坐标集合。
4.3 漂浮物体量预估
分析识别时,将待处理的库区图片按照4.1的步骤(1)和(2)预处理完成后,代入步骤(3)产出的形态学分析模型,得到分析识别出来的漂浮物区域信息和总像素点数N,然后,按照设定好的3个预估参数:①像素-面积转换比A,m3/像素。该参数表征了图像中1个像素点代表了水库库区中的实际面积大小。②漂浮物平均深度H,m。该参数代表了库区水上漂浮物的平均厚度,包括水面上下的厚度。③漂浮物平均密度P,kg/m3。根据以上参数,得到漂浮物总体积V为
V=NAH
(6)
由此,漂浮物总质量M为
M=VP
(7)
5 实例及分析
以湖北省某大型水库上游库区远程摄像头所拍图像为例,除去因天气、摄像头遮挡等导致质量不佳的成像外,共计得到63张有效样本图像,统一按照流程(1)、(2)进行预处理后,将其中的48张作为训练样本集,15张作为测试样本集。
5.1 基于内容的图像压缩示例
基于图像内容的压缩效果如图2所示。从图2可以看出,本文算法对于目标区域的损失极小,基本上保留了漂浮物区域的原始细节信息。
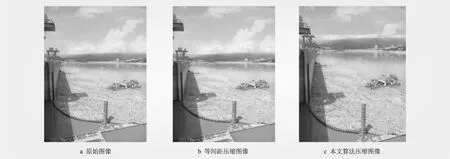
图2 基于内容的图像压缩算法对比
5.2 和声搜索算法改进的形态学分析
本实例中和声搜索算法的基础参数设定如下:和声库大小为200,和声库取值概率起始值为0.10,最终值为0.90,微调概率起始值为0.80,最终值为0.25,微调带宽取值为1.0,最大迭代次数为6 000。
此外,和声库初始化时形态学分析的基础参数取值组合时,以滑动窗口高WH=6、宽WL=6、矩阵块最小能量阈值E=180、矩阵块腐蚀尺寸C=5、矩阵块膨胀尺寸S=5、单堆漂浮物的最小区域像素尺寸A=150作为种子,随机生成各种参数的取值组合。
训练完成后,以产出的形态学分析模型对测试集图像进行漂浮物区域识别,并输出识别区域,效果如图3、图4所示。其中,能量矩阵块图为经过能量阈值选择过的矩阵块集,形态学处理图为经过腐蚀、膨胀、矩阵块联通化处理的图像。
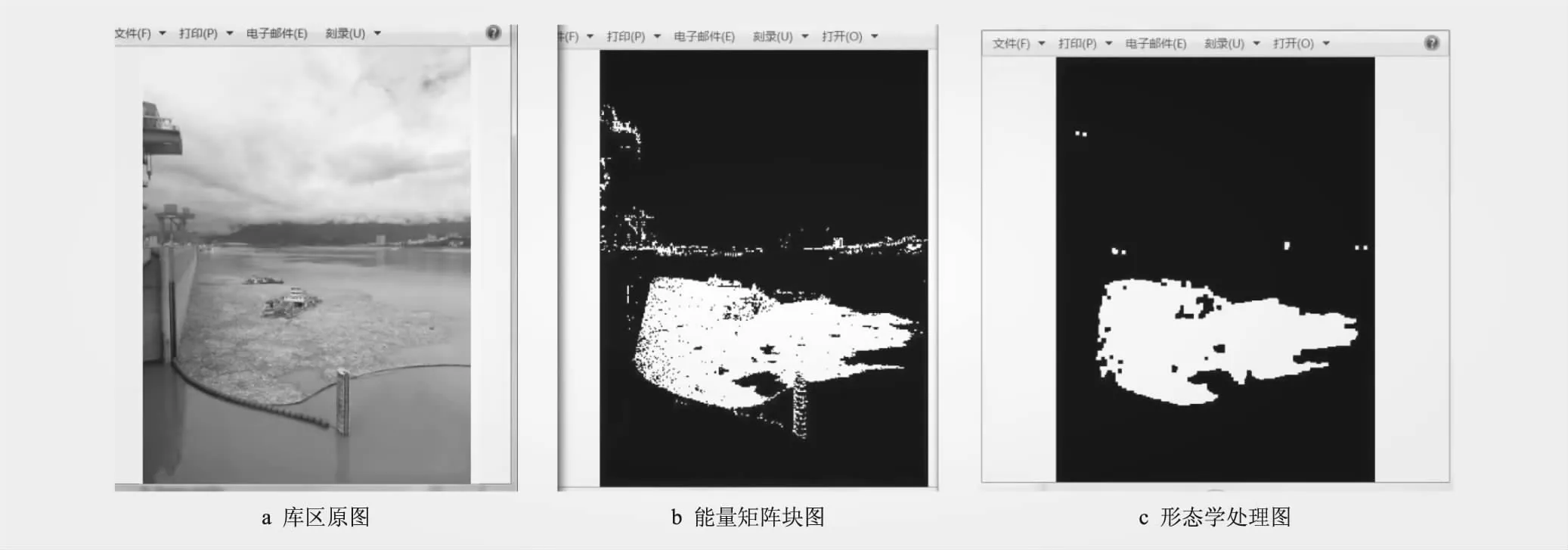
图3 和声搜索改进的形态学分析模型识别效果示例1

图4 和声搜索改进的形态学分析模型识别效果示例2
图3和图4的形态学分析模型在训练集中的整体精度达到95.61%左右,在测试集中的平均识别精度也达到了94.37%左右。以图5为例,左上为测试集中的原始库区图像,右上为达到能量阈值的矩阵块集合,左下为经过腐蚀、膨胀、联通化和最小面积区域过滤的识别图像,右下为最终识别出的区域与原图叠加对比的效果图。从图5可以看出,本方法基本以较好的精度达到了库区漂浮物识别的目标。最后,水库单位根据多年来运行管理经验,基于漂浮物的常见构成部分和比例设定了漂浮物平均深度、平均密度,最终得出了库区当前漂浮物的体积与质量的估计值。
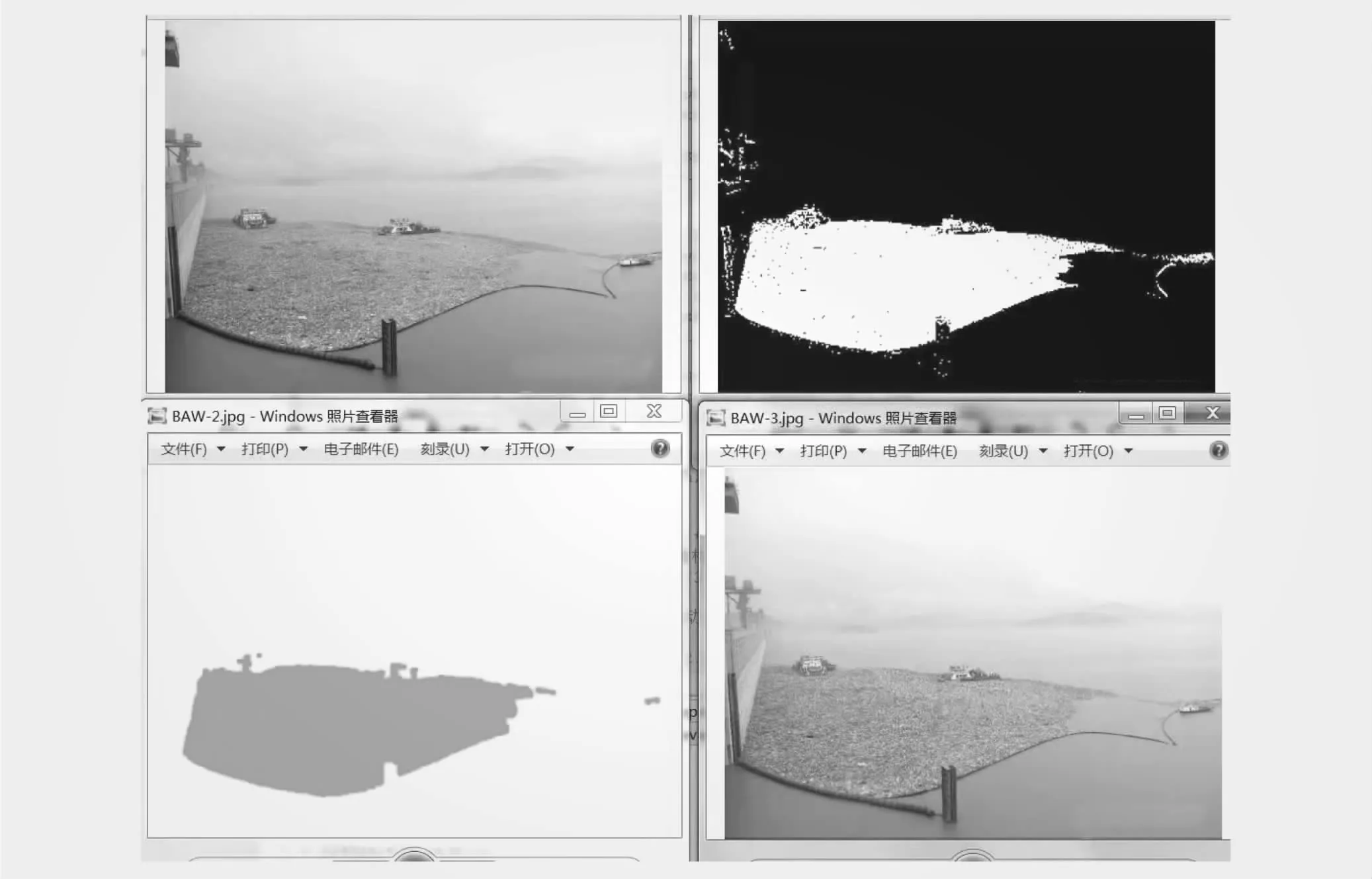
图5 和声搜索改进的形态学分析模型整体效果对比
本文提出的库区漂浮物形态学分析识别方法已在湖北省某大型水库上得到了实际应用,投运以来的运行实践表明,其计算精度良好,鲁棒性强,为水库的库区漂浮物监控管理工作提供了实时、可靠的决策辅助支持。
6 结 语
本文提出了基于和声搜索算法改进的库区漂浮物形态学分析识别方法,其核心在基于数学形态学的基础上提出了漂浮物识别的方法论、演算函数以及损失函数定义,然后利用和声搜索算法在形态学分析参数的取值组合空间内寻求最优解,从而得到最终的分析识别模型。相比较目前流行的深度学习图像识别,该方法逻辑清晰简明,易于实现、部署与迭代,计算资源需求极小,且更适用于小样本量下的库区漂浮物分析识别处理。
库区漂浮物形态学分析识别方法在体量预估上还有持续改进的空间,包括雨雪、雾霾、强光、暗光、阴影等条件下,图像识别前需考虑增加锐化、增强、滤波等预处理操作;此外,体量预估中人工设定像素-面积转换比、漂浮物平均深度、漂浮物平均密度等参数的精度难以把握,如何继续基于图形图像处理技术给出更精确的估值等,都是下一步工作的重点与方向。
猜你喜欢
智慧少年(2022年7期)2022-06-24
现代电力(2022年2期)2022-05-23
中国药学药品知识仓库(2022年9期)2022-05-23
齐鲁艺苑(2022年1期)2022-04-19
昆明医科大学学报(2021年12期)2021-12-30
军民两用技术与产品(2021年2期)2021-04-13
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
科学导报(2020年39期)2020-06-21
智能计算机与应用(2018年3期)2018-09-05
发明与创新·中学生(2015年4期)2015-04-09
