
脉冲星导航在载人火星探测中的应用
2022-11-09 04:21李治泽李连升王奕迪宋敏章
载人航天 2022年5期
郑 伟, 李治泽, 李连升, 王奕迪, 宋敏章
(1.国防科技大学空天科学学院空天工程系, 长沙 410073; 2.北京控制工程研究所, 北京 100190)
1 引言
在人类太空探索的第二个50 年,火星探测正成为国内外航天领域研究的热点方向。 开展载人火星探测是火星探测技术发展的必然趋势。 2020年,中国首次火星探测任务天问一号的成功发射,使中国成为世界上第二个独立掌握火星着陆巡视探测技术的国家,也为未来载人火星探测的开展奠定了基础。 目前ESA、SpaceX 公司等提出了载人火星探测计划,但均未能成功实施。 这表明载人火星探测技术是当今世界高科技中极具挑战性的领域之一。
与近地轨道任务相比,火星探测面临飞行时间长、通信距离远、地面测控时延长、空间环境更加复杂以及30 d 左右通讯中断的日凌时间等问题,增加了火星探测器制导、导航和控制的难度[1-2]。 其中,日凌干扰现象,即当太阳运行到地球和火星探测器之间时,太阳发出的强烈电磁波会对无线电通信产生干扰,探测器将无法与地面建立联系。 在载人探测情况下,日凌干扰是无法接受的,为保障航天员的生命安全,需要在与地面通讯中断后仍具有能确定航天器大概位置及应对突发状况的保底手段,这对载人探测器在轨运行的自主性提出了更高的要求[3]。
根据在轨观测天体的不同,目前行星、深空探测器的天文导航方法主要分为:基于太阳或行星观测的自主导航方法[4-5];基于小行星观测的自主导航方法[6-8]以及基于X 射线脉冲星观测的自主导航方法[9-11]。 其中,通过观测太阳、行星及小行星的导航方法技术比较成熟,多次成功应用于行星探测任务中。 但在导航过程中,其导航精度会随探测器与观测目标之间距离的增加而降低。基于太阳或行星观测的方法,由于观测目标距离探测器相对较远,星敏感器角度测量的微小误差就会导致巨大的导航位置误差;而基于小行星观测的方法,其导航精度受到原理及测量仪器的制约,目前还难以满足载人探测的需求。
虽然基于X 射线脉冲星观测的自主导航方法受限于当前X 射线导航终端技术发展水平的限制,存在导航精度相比其他方法不突出的问题,但仍然是应用于载人火星探测的有效自主导航手段,且潜力巨大。 随着一系列X 射线脉冲星导航试验计划的开展与实施,如:美国国防高级研究计划局(Defense Advanced Research Projects Agency,DARPA)提出的XNAV(X-ray Navigation and Autonomous Navigation Verification)研究计划、ESA制定的深空探测器脉冲星导航研究计划、NASA空间站X 射线计时与导航技术实验室开展的SEXTENT 项目[12]等以及国内脉冲星试验01 星(XPNAV-1)、慧眼HXMT 卫星的发射成功,基于X 射线脉冲星的深空探测器自主导航方法得以进一步的研究与应用。 同时,国内外研究人员提出了多种自主导航方法,包括利用X 射线脉冲星信号对航天器位置、速度及姿态等的解算[13-15],基于实测数据引入动态信号处理的导航方法以及多种组合导航算法[16-18],并进行了仿真,取得了一定的研究成果。 在利用X 射线脉冲星观测量为执行火星探测任务的飞行器提供自主导航服务方面也开展了相关研究,包括相关时空基准的定义和转换,火星探测器轨道模型、脉冲星导航观测模型及相关滤波算法的研究等内容[19-20]。
本文在分析载人火星探测任务对自主导航迫切需求的基础上,结合工程应用可能面临的实际问题,分析了脉冲星导航的应用优势,在脉冲星导航载人探火系统的X 射线星载探测器及星载处理系统方面给出了初步的设计方案,并提出了一种基于单探测器序贯观测的X 射线脉冲星高精度自主导航方案。 方案构建了基于单探测器的脉冲星导航系统的观测模型,基于现有的空间观测数据分析了导航系统的可观测性,并仿真验证了系统的导航性能。
2 脉冲星导航基本原理及应用优势
2.1 脉冲星导航基本原理
基于X 射线脉冲星导航的航天器自主导航是通过位置差分观测实现,即比较航天器与处于太阳系质心(Solar System Barycentre,SSB)处的脉冲星信号相位差来提取导航测量值。 测量值反映的是航天器到SSB 在脉冲星方向上的投影距离。通过处理基于一个或多个不同方向脉冲星的测量结果,并结合航天器轨道动力学进行滤波,即可计算得到航天器位置及速度的最佳估计[13]。 具体原理示意图如图1 所示。
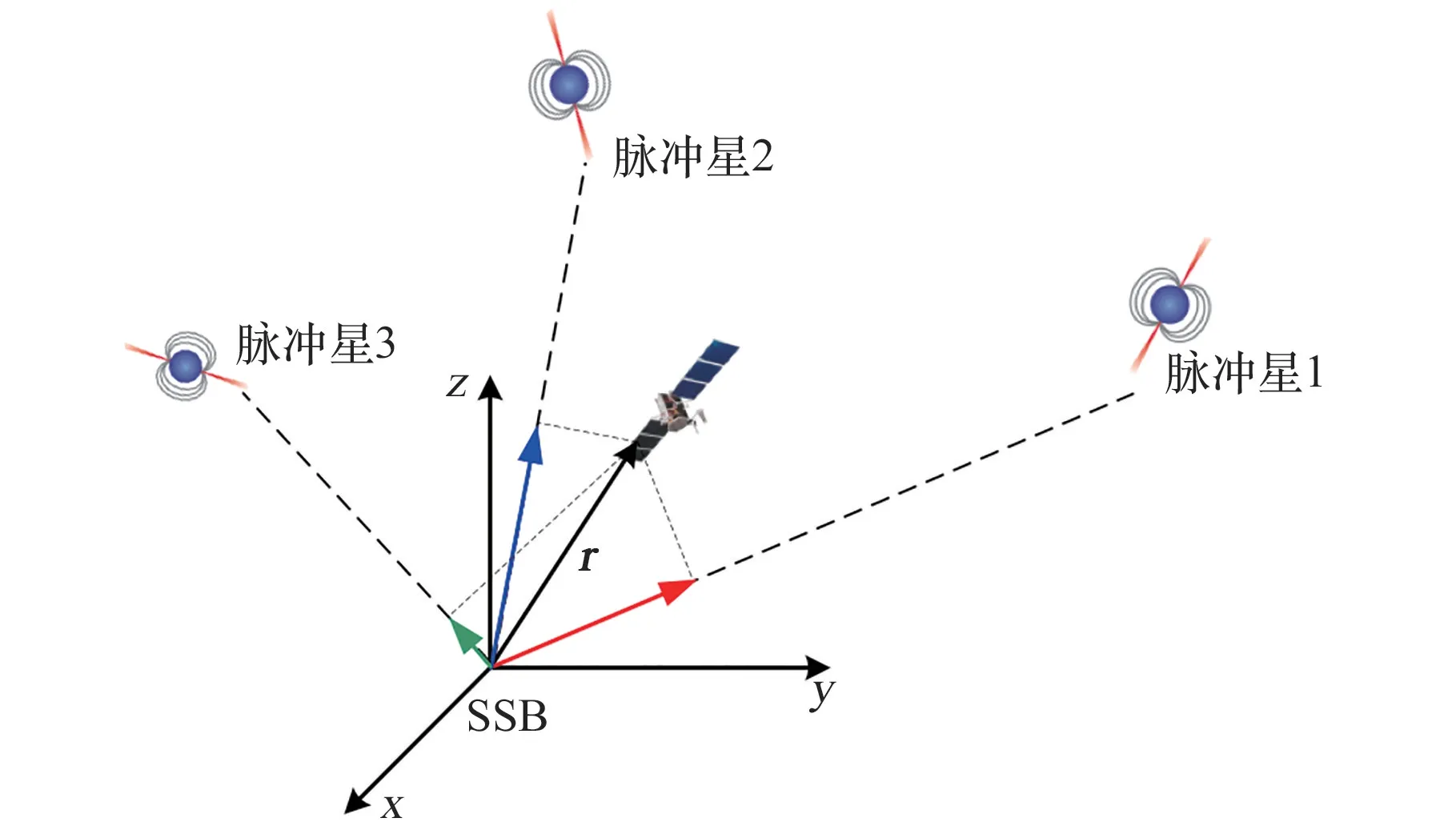
图1 X 射线脉冲星导航原理Fig.1 Principle of X-ray pulsar-based navigation
导航测量值如式(1)所示:

其中,n为脉冲星方向矢量,r为航天器位置矢量,c为光速。tSC为航天器处探测得到的脉冲到达时间,光子的相位信息可利用星载计算机直接计算;tSSB为脉冲到达SSB 处的时间,相应的相位信息需要根据如式(2)建立在SSB 处的相位传播模型进行预报。

其中,ϕ0是星历表历元t0时刻的脉冲星信号相位。υ(n)0=υ(n)(t0) 是t0时刻的自转频率的各阶导数。
相位传播模型中的相关参数以及观测目标脉冲星的轮廓模板由构建的脉冲星数据库提供。 而在实际脉冲星计时导航中,频率参数高阶导数无法非常精确地估计,会产生计时噪声,计时噪声引起的相位传播误差会随时间增长而累积。 因此,脉冲星数据库需要根据脉冲星相关情况进行更新,航天器才可以在参数误差的允许范围内开展自主导航。
2.2 脉冲星导航应用优势
X 射线脉冲星的周期具有良好的长期稳定性,可以实现从近地到深空的全领域、全天候、全天时的自主导航服务,不仅可以提供高可靠性的位置、速度和姿态等导航信息,还可以提供时间基准信息。 同时,X 脉冲光子属于高能粒子,能够集中脉冲星的绝大部分辐射能量,有利于星载导航终端的小型化与轻型化。
与其他自主导航方法相比,X 射线脉冲星导航具有以下优势:①在全太阳系内导航精度一致,其导航结果不存在因原理观测天体而急剧恶化的情况,且影响导航精度的误差因素较少;②X 射线脉冲星导航原理简单,仅携带单一X 射线导航终端即可实现航天器在轨的自主导航;③导航系统消耗代价极低,可以实现完全的在轨实时计算处理;④可以无视日凌等干扰现象的影响;⑤X 射线脉冲星在天区分布广泛,可以保证其导航测量值在任意时刻均能观测获取。
综上所述,基于X 射线脉冲星观测的自主导航方法在载人火星探测上具有导航效果较好,实现简单且代价极低等诸多应用优势,可以为任务过程中航天员的生命安全提供有效保障,作为载人火星探测的保底自主导航手段。
3 脉冲星导航载人探火系统初步方案
3.1 初步方案设计
导航系统包括探测分系统及在轨处理分系统。 探测分系统由X 射线掠入射嵌套聚焦镜头组件和X 射线导航终端组件两部分组成;在轨处理分系统由整器嵌入式计算机实现,作为星载的导航计算平台。
3.1.1 探测分系统方案设计
设计采用如图2 所示的X 射线掠入射聚焦探测体制,以美国在国际空间站上的NICER 探测器及作为脉冲星导航试验01 星的主载荷为基础,利用硅漂移导航终端组件实现X 射线光子高效率探测,加入空间本底抑制系统,降低空间复杂高能环境的噪声;以在研EP 卫星的Wolter-I 型聚焦镜作为基础,通过一次反射技术,嵌套掠入射聚焦光学系统,实现X 射线光子高效率聚焦。
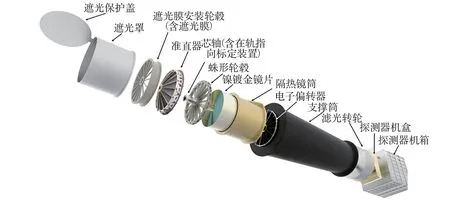
图2 X 射线导航终端示意图Fig.2 Schematic diagram of X-ray detector
X 射线掠入射镜片采用镍钴材料,结构刚度更强。 镜片厚度较纯镍镜片降低50%,实现镜片轻量化。 通过优化设计,将X 射线掠入射嵌套聚焦镜头组件和X 射线导航终端组件分别安装于整器结构上,能有效降低系统重量。
具体技术参数设计如表1 所示。

表1 参数指标设计Table 1 Design of technical parameters
3.1.2 在轨处理分系统方案设计
在轨处理分系统设计能实现X 射线光子数据预处理、动态信号处理和导航解算功能,完成导航算法的在轨实现,实时解算出卫星轨道信息。同时,分系统还需具备导航参数、脉冲星星历及模板参数以及整个程序的非日凌时间段的在轨更新能力,从而在载人火星探测任务过程中,能针对实际状况对脉冲星信号处理与导航算法进行持续优化与更新,以保证任务周期内的导航性能。
具体功能设计如下:
1)在轨数据预处理。 自主获取当前观测目标信息,对星上探测器得到的实时观测数据进行筛选、过滤、时间解算及格式转换,接收并处理得到脉冲星星历等辅助信息供导航解算使用等;
2)动态信号处理。 基于一定时段内的单光子观测信息得到脉冲到达时间(Time of Arrival,TOA)的估计;
3)导航解算。 基于信号处理结果和其他信息,计算得到航天器当前位置和速度估计。
在轨处理分系统核心计算模块设计由高性能CPU,FPGA 及大容量FLASH 等组成。 对于逻辑运算比较简单、适合并行的计算部分,包括在轨数据预处理和动态信号处理等,设计使用FPGA 进行数据处理;对于导航解算部分,设计利用专门的CPU 进行处理。
具体性能指标设计如表2 所示。

表2 性能指标设计Table 2 Design of performance indicators
3.2 脉冲星导航系统观测模型
基于单探测器的脉冲星导航系统观测模型可表示为式(3)、(4):
其中,x表示航天器状态量,h(x) 为测量方程,v表示测量噪声。 式中,观测量z表示为脉冲到达SSB 与航天器之间的时间差。
由于脉冲星是太阳系外天体,光子从脉冲星到达导航终端的时间及到达SSB 的时间计算均需要考虑广义相对论效应,考虑到X 射线导航终端与SSB 之间的几何距离会产生时间Doppler 延迟、X 射线光子平行到达太阳系引起的Roemer 延迟和在太阳引力场作用下光线弯曲产生的Shapiro 延迟, 即可得到如式(5)所示的脉冲星导航测量值表达式。

式中,b是SSB 相对于太阳质心的位置,D0是脉冲星相对于太阳质心的位置矢量大小,μSun是太阳引力常数。
研究表明,如式(3)建立的单探测器脉冲星导航系统模型可观测[21]。 但仅采用单一脉冲星的观测数据进行导航,会极大降低系统的可观测度及对应的导航精度。 因此,观测方案采用序贯观测不同方向上的3 颗脉冲星,以保证基于单探测器脉冲星观测系统的导航精度。
3.3 导航系统可观测性分析
3.3.1 导航脉冲星选择
导航脉冲星选择需要根据脉冲星的可见性条件,测量噪声以及导航脉冲星组合的空间几何分布、构型对导航精度的影响,并综合考虑脉冲星的流量、周期及轮廓等数据库参数进行分析。
基于国内外的脉冲星在轨观测数据,本文选择可用于导航观测的脉冲星组合,如表3 所示。

表3 导航脉冲星Table 3 List of navigation pulsars
在载人火星探测任务执行过程中,由于太阳规避导致部分主选脉冲星不可见,这种情况下则可利用备选脉冲星如B1509 等进行替换序贯观测。
3.3.2 基于NICER 数据的脉冲星可观测性分析
NICER 是NASA SEXTENT 项目的一部分,于2017 年6 月发射至国际空间站,是验证X 射线脉冲星导航的主探测器,具有极高的时间分辨率和灵敏度,能提供充足的累积观测数据,是目前X射线脉冲星计时导航研究的最佳选择。 同时,NICER 的X 射线导航终端各单元的有效面积约为35 cm2,与本文设计的掠入射聚焦型导航终端探测体制相同,单元有效面积近似(40 cm2)。 因此,本文选择利用NICER 的在轨观测数据进行可观测性分析。
主选导航脉冲星的TOA 精度与观测时间的关系如图3 所示,分析所用数据来自NICER 探测器。
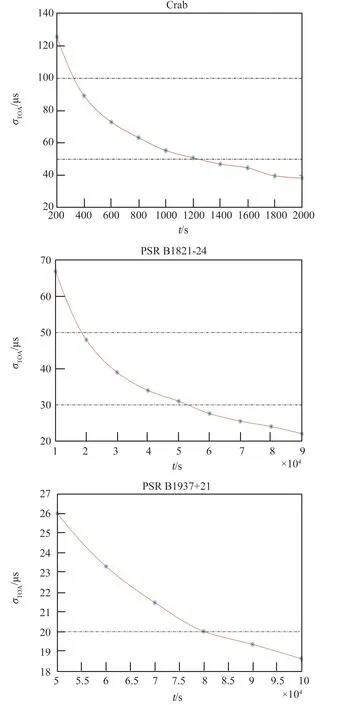
图3 导航脉冲星TOA 残差与观测时间的关系Fig. 3 Relationship between the TOA accuracy of navigation pulsars and the observation time
其中,大流量年轻脉冲星Crab 在观测时长约为1200 s 时,处理TOA 精度可以达到50 μs;毫秒脉冲星B1821 在观测时长约18 000 s 时,其处理TOA 精度可达到50 μs,在观测时长约52 000 s时,其处理TOA 精度可达到30 μs;毫秒脉冲星B1937 在观测时长约80 000 s 时,其处理TOA 精度可达到20 μs。
综上所述,在载人火星探测任务执行过程中,航天器可以根据观测的脉冲星处理TOA 精度与时间的关系,分配不同的观测时长。 且设计方案中导航终端的单元有效面积大于NICER,因此,TOA 精度会优于上述分析结果。
4 仿真验证
4.1 仿真条件
本文选取2020 年美国毅力号火星探测器的地火转移段轨道作为仿真轨道,选取时间为2020年10 月2 日~2020 年11 月30 日,为期60 d 的转移轨道数据模拟载人火星探测器应用场景,坐标系采用J2000.0 日心惯性坐标系。 仿真使用Crab、B1821-24 及B1937+21 作为X 射线导航脉冲星,采用对3 颗导航星序贯观测的观测模式;X射线导航终端的单元有效面积设置为40 cm2,考虑到导航脉冲星的恢复轮廓信噪比及信号处理所需时间等方面的因素,完成一次续惯观测的导航步长设置为24 h,其中导航星Crab、B1821-24 及B1937+21 的持续观测时间及根据3.3.2 节分析结果设置,导航脉冲星的脉冲TOA 随机测量方差如表4 所示。
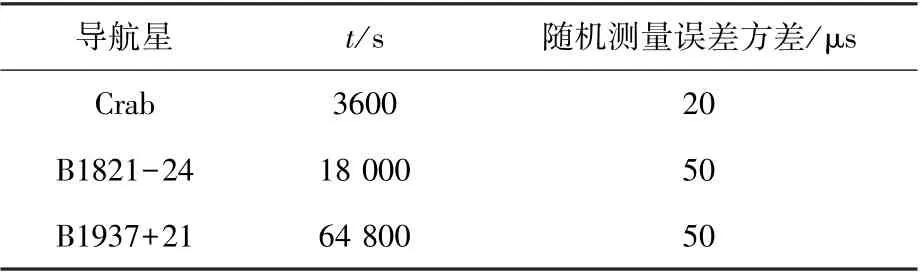
表4 观测时间及测量误差方差Table 4 The observation time of navigation pulsars and variance list of measurement error
本文使用UKF( Unscented Kalman Filter) 滤波方法,滤波器初始状态误差为dX=[104,104,104,10,10,10],初始状态误差协方差矩阵P0=diag(108,108,108,102,102,102) 。
4.2 仿真结果
图4 分别给出了基于序贯观测X 射线脉冲星的导航系统在地火转移段轨道下的自主导航位置和速度误差。

图4 仿真导航结果Fig.4 Navigation performance of simulation
仿真结果表明,模拟载人火星探测器仅凭借脉冲星导航系统可以实现自主导航的精度为:位置估计误差20 km 左右,速度估计误差约为0.05 m/s 左右,最优定轨精度可以达到10 km 左右。 且除去在轨的信号处理过程外,算法一次滤波周期的导航解算仅耗时2 s 左右。
由此可见,仅需要改变X 射线导航终端的朝向,序贯观测观测3 颗脉冲星,即可实现无需依赖地面测控系统的航天器自主导航,工程实现简单,代价极低,且导航精度可以接受。 因此,在工程应用价值较高,可以为载人火星探测提供一种能有效保底的自主导航方案。
5 结论
本文基于载人探测器对自主导航的迫切需求,针对地火转移过程中面临日凌干扰造成的与地面通讯中断等问题,阐述了脉冲星导航的应用优势;设计给出了涵盖X 射线脉冲星导航终端、脉冲星星载计算平台的载人探火系统的初步方案以及导航脉冲星的观测方案;对可用于导航的脉冲星进行了优选,并基于现有的空间观测数据分析了导航系统的可观测性。
1)通过算例仿真分析,结果表明基于单探测器序贯观测X 射线脉冲星的导航系统能为载人火星探测器提供精度20 km 左右的自主导航方法,且系统原理简单,工程实现代价极低,能够在轨快速完成导航解算。
2)X 射线脉冲星导航能为中国未来的载人火星探测任务转移轨道自主导航系统的设计提供一种简单、低耗、可行的导航方案,可作为保障航天员生命安全的保底自主导航手段,也可为中国未来开展木星以远的行星探测及太阳系边际探测等提供参考及技术支持。
猜你喜欢
国际太空(2022年7期)2022-08-16
北京航空航天大学学报(2021年7期)2021-08-13
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
国际太空(2019年9期)2019-10-23
国际太空(2018年12期)2019-01-28
国际太空(2018年9期)2018-10-18
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
儿童故事画报·自然探秘(2017年2期)2017-09-26
中国惯性技术学报(2017年1期)2017-06-09
百科探秘·航空航天(2016年9期)2016-12-01
