
关于CORS实时高精度自主解算平台的研究
2022-11-11 05:57冯振俭
大众科技 2022年10期
冯振俭
关于CORS实时高精度自主解算平台的研究
冯振俭
(南宁市自然资源信息集团有限公司,广西 南宁 530021)
随着北斗三号组网建设进入收官阶段,以北斗为核心的GNSS应用市场将迎来高速发展期,然而,现有CORS系统受算法局限,难以满足海量用户高并发应用的需求,制约了CORS系统的全面推广应用。文章提出了建立CORS实时高精度自主解算平台的技术路线,从平台总体架构、CORS分布式服务子系统、CORS网络RTK解算子系统三个方面阐述了平台的设计思路,优化了CORS系统数据解算算法,解决了CORS海量用户高并发应用的问题。
CORS;自主解算;平台
引言
近年来我国的国民经济持续处于高速发展状态,各类用户对稳定可靠的高精度位置服务的需求增长迅猛,虽然目前基于区域CORS的网络RTK能够向用户提供厘米级的定位精度,但是目前市面上的大多数软件在海量用户同时在线时,由于算法本身的局限,服务器压力剧增,必然会出现服务器崩溃、服务中断等问题。因此,面对海量用户的并发请求,必然需要研发新一代算法,具备多线程、分布式计算的能力,以高效率、高稳定性解决海量用户并发的问题。
1 研究目标及内容
基于国家北斗高精度定位系统,研发和建立国产自主的CORS实时高精度自主解算服务云平台,能够在精度和稳定性达到国际同类软件的水平,满足CORS安全升级改造工作中软件要求,能通过云技术为海量级用户提供稳定可靠的高精度定位导航服务,同时在满足安全规定的前提下还支持开放接口将高精度服务数据共享应用至其他政府部门。
CORS实时高精度自主解算服务云平台建设主要包括CORS分布式服务子系统建设和CORS网络RTK解算子系统建设两部分。其中,CORS分布式服务子系统建设支持分布式部署架构,可以在云服务器上进行拓展与部署,支持海量并发用户,该子系统包含系统基础功能、专业服务接口、系统主控中心以及格网服务模块。CORS网络RTK解算子系统建设支持VRS模式,支持格网化虚拟参考站生成、存储、播发。该子系统包含观测数据与实时产品的接收功能、数据预处理功能、数据解算功能、改正数储存功能、改正数脱密功能。
2 平台架构设计
2.1 分布式服务子系统架构设计
CORS分布式服务子系统采用三层B/S结构,基于ASP.NET技术开发系统应用平台,整个系统分为应用层、逻辑层和数据层。各部分功能作用如下所述,其框架结构如图1所示。
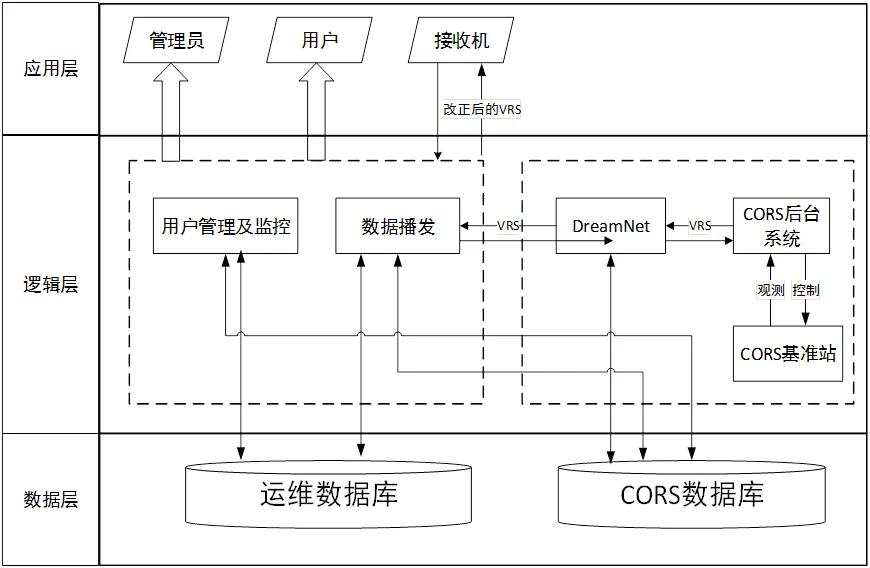
图1 分布式服务子系统框架结构图
应用层:主要面向应用用户,包括管理员用户、普通用户以及前端接收机等,用于处理与用户的前端交互界面。
逻辑层:一是对各类数据请求进行相应的处理,包括负责向数据层发送数据请求或从数据层取得有关数据进行统计查询、显示,进行坐标参数转换;二是主动监控CORS系统各部分的工作状态,包括用户位置、轨迹、定位状态和基站状态等;三是生成系统的管理日志,并实时存储到数据库中去。
数据层:用来定义、维护、访问和更新数据并管理和满足应用服务对数据的请求,该层负责解析业务逻辑层所发出的数据请求,执行相关的操作。
分布式服务子系统的逻辑结构主要由CORS基准站、DreamNet服务器和南宁市测绘基准网站服务器以及各种类型的用户(包括RTK测量用户、多终端管理用户等)构成,它们通过有线(以太网)和无线(通信链路)进行实时链接和数据传输。
2.2 CORS网络RTK解算子系统架构
北斗CORS网络RTK解算子提供基于VRS技术的CORS运维管理功能,在DreamNet服务器与接收机用户/WEB用户之间加入一台服务器,用户直接与本服务器进行连接享受各种服务。ORS基准站与服务器之间通过专线网络进行连接,网站服务器和DreamNet服务器处于同一局域网内,通过路由器进行数据交换,GIS用户、RTK用户和移动端用户通过无线通讯基站与向服务器发送请求,而浏览器用户直接通过以太网向服务器请求数据。其网络拓扑图如图2所示。
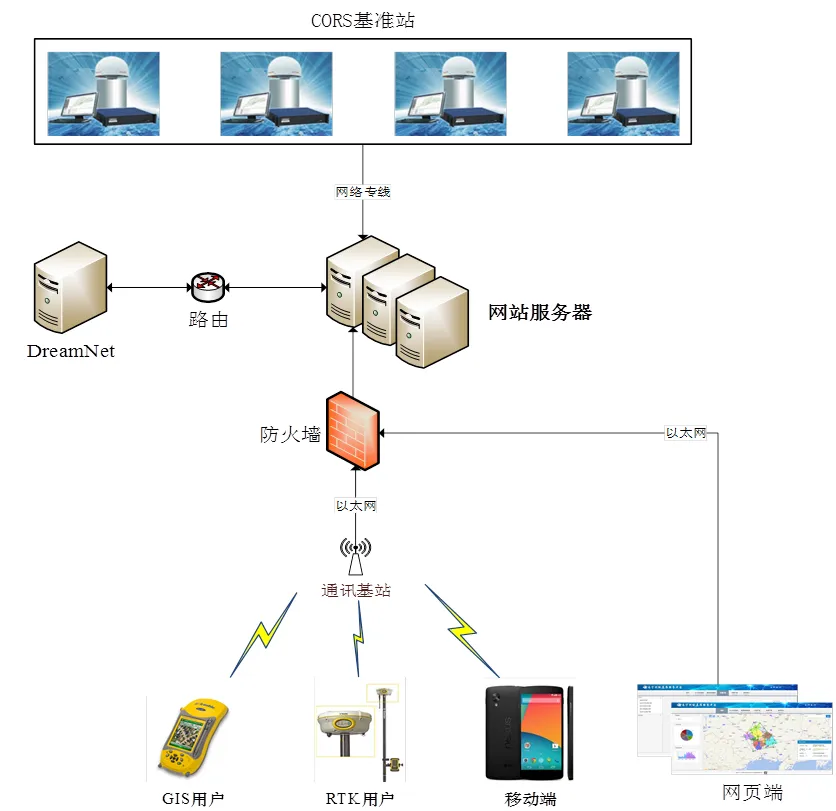
图2 北斗CORS网络RTK解算子系统结构图
2.3 平台数据流设计
CORS基站接收卫星信号并将数据实时发送到DreamNet服务器,DreamNet服务端进行实时解算并建立覆盖范围内的高精度模型。测量用户在接入南宁市北斗位置综合服务系统后,将观测值按照NMEA的格式实时传输给网站服务器,网站服务器将数据流转发给DreamNet服务器进行计算,DreamNet服务端计算完成后,将VRS虚拟观测值返回到网站服务器,网站服务器再以RTCM的格式播发给用户,RTK用户即可根据改正数得到实时高精度坐标。此外,系统提供了Web和Android客户端两种方式的系统管理平台,Web端用户通过Http协议与服务器交互进行查询和管理操作,Android端用户通过Webservice(SOAP/Http协议)与服务器进行交互。
3 CORS分布式服务子系统设计
北斗CORS分布式服务子系统支持分布式部署架构,可以在云服务器上进行拓展与部署,支持海量并发用户。同时也支持将高精度数据推送至其他政府部门并监管使用状态。北斗CORS分布式服务子系统的核心在多线程高并发解算,其中多线程技术主要在解算模块,以及对外播发模块中完成,实现位置服务的稳定可靠、高精度。在核心的解算模块中,可以使用多线程技术实现星历,同时获取多系统多频原始观测值、相关配置参数等信息,减少解算时间,提高算法效率,进而减少差分延时,提高用户固定率。在播发模块使用多线程技术,支撑海量用户请求及VRS数据的分配,大大降低播发端的压力及提高播发效率。
4 CORS网络RTK解算子系统
网络CORS解算子系统支持VRS模式和格网化虚拟参考站的生成、存储、播发。该子系统包含观测数据与实时产品的接收模块、数据预处理模块、数据解算模块。
4.1 观测数据与实时产品接收模块
4.1.1 数据获取
系统能实现从IGS、CODE等外网服务器上下载数据,准备进行解算需要的一些文件。如果软件系统部署在内网,无法连接外网服务器,需要在一台外网服务器中部署数据获取部分的软件,然后用同步软件将文件同步到内网服务器。数据获取部分需要实现支持数据解码、支持观测数据自动和手动下载、支持星历数据自动和手动下载(包括精密星历、DCB文件等等)、支持观测数据定时和实时数据传送、支持NTRIP和TCP/IP协议的观测数据流的获取、支持FTP协议和HTTP协议的观测数据文件的获取。同时,需要保证观测数据文件存储的完整性,类似于Storage Integrity,测站数据下载中断恢复后,需要能补充或者恢复继续下载。
4.1.2 数据检查
软件系统需要对进行解算的数据进行检查。这包括卫星系统类别、卫星数量、观测值类型、起止时间、数据完好率、采样率、周跳率、多路径影响和信噪比等信息的检查,进行实时或定时的计算分析,支持以图表或者文件等形式输出检查结果。在发现数据质量出现问题的时候,需要支持提供告警功能。需要支持GPS/BDS/GLONASS等多卫星导航系统的数据质量检查,提供统计分析功能,支持按站和按时间两种方式统计质量情况。
4.1.3 数据存储
软件系统需要支持对观测数据、星历数据、结果数据等数据的存储。这包括支持RINEX等多种文件格式,支持不同时间系统的选择和不同采样率(1 s、15 s、30 s)的采样率设置,具备格式转换、重采样、归档和推送等功能,支持以图表或文件等形式输出存储状态,支持虚拟格网点的存储,支持多时间系统或目录格式存储,以及格网点存储配置(设置点位坐标、采样率等,需要支持RINEX格式里的o文件、d文件以及压缩格式文件等),以及支持多站数据存储同时配置。
4.2 数据预处理模块
由于地面流动用户在接收导航卫星信号的过程中需要保持对特定的卫星的连续跟踪,但是跟踪的过程中难免出现卫星信号被建筑物、植被等遮挡,或跟踪卫星出现故障,或受到与定位导航信号频率相近的其它电磁波干扰的情况,接收机可能会出现失锁,其内部的整周计数器无法连续计数;接收机持续性地测量载波相位值时,由于某些因素使得整周计数出现问题,测得的相位观测值相比准确值出现几个整数周的跳跃,称为周跳[1]。进行周跳探测的方法有多种,具体有多项式拟合法[2]、高次差法[3]、电离层残差法[4]等。当信号被接收机重新锁定后,载波相位观测量的整周部分必然错误,但是不到一周的小数部分任然保持正确。在正式解算之前需要将周跳探测出来,并加以标记,这就是数据预处理的主要操作。
4.2.1 M-W法
M-W法的实质是通过双频的宽巷相位观测值和窄巷的伪距观测值的线性组合,将宽巷模糊度作为统计检验量,如式1所示:

其中N、λ分别表示宽巷观测值的整周模糊度、宽巷观测值的波长,1、2、1、2、1、2分别表示双频伪距、相位观测值,以及观测值所在频点的频率。从式(1)可以看出检验量不受基线长度、电离层以及接收机运动状态的影响。需要注意的是当两个频率上的载波发生相同大小的周跳,M-W失效。
4.2.2 电离层残差法
电离层残差法是美国学者Goad在1986年提出的,它主要是考察不同历元之间电离层残差的变化[5]。该方法认为在电离层较稳定的情况下,若没有周跳发生,相邻历元的电离层残差统计量应该比较稳定,不会出现阶跃的情况,于是通过检验各个历元电离层残差值,达到周跳探测的目的。
本文在软件实现的时候采用电离层二次差作为统计量,基于实时探测模式探测周跳,即同时存储三个历元、-1、-2的观测数据,其中表示当前观测历元,当历元疑似为周跳时,等待历元+1的观测数据,然后构建计算历元-1、、+1的电离层二次差,判断历元是否确实出现周跳。其原理如下:
若不考虑多路径效应、观测噪声等因素的影响,当前观测历元的双频载波相位之差为:

同理可得历元-1的双频载波相位之差,若历元未发生周跳,由()与(-1)的差值可得:

表示历元与历元-1的电离层残差一次差。
同理可得(-1)与(-2)的差值:


4.3 数据解算模块
数据解算处理模式支持多种定位模式,包括单站模式、RTD模式、RTK模式、网络化模式和VRS模式。支持站点、卫星导航系统、高度角、星历、钟差和解算模型等参数设置。支持精密星历、IONEX、DCB等文件的读取,具备选择不同的网解模式,支持多种电离层和对流层模型的选择、实时显示解算状态、以数据流或文件等方式输出结果。站点坐标解算模块支持实时和事后观测数据的计算,支持选择多种解算方式,支持以图表或者文件等形式输出解算结果。
5 结束语
北斗CORS实时高精度自主解算服务云平台的研发可有效提高测绘作业效率,降低测绘作业成本,研究成果可应用于高精度导航定位、精密监测等城市建设、城市管理等诸多领域,极大地节约了政府服务部门行政成本和测绘企业的运营成本。
[1]王仁谦,朱建军. 利用双频载波相位观测值求差的方法探测与修复周跳[J]. 测绘通报,2004(6): 9-11.
[2]李江卫. GPS 相位观测值中周跳的探测与修复算法研究[D]. 武汉: 武汉大学,2004.
[3]严新生,王一强,白征东,等. 联合使用高次差法和TurboEdit 法自动探测修复周跳[J]. 测绘通报,2007(9): 5-9.
[4]王维,王解先,高俊强. GPS 周跳探测的方法研究[J]. 武汉大学学报(信息科学版),2010,35(6): 687-290.
[5]彭磊,任立华,黄真辉. 多频电离层残差法用于周跳的探测与修复[J]. 测绘工程,2014(12): 35-38.
Research on Real-Time High Precision Autonomous Calculating Platform of CORS
As the construction of Beidou 3 network enters the final stage, the GNSS application market with Beidou as the core will usher in a period of rapid development. However, the existing CORS system is limited by algorithm, and it is difficult to meet the demands of massive users for high concurrent applications, which restricts the comprehensive promotion and application of the CORS system. This paper puts forward the technical route of establishing CORS real-time and high-precision autonomous calculating platform, expounds the design idea of the platform from three aspects of the overall platform architecture, CORS distributed service subsystem, and the CORS network RTK solution operator system, optimizes the data solution algorithm of CORS system, and solves the problem of high concurrent applications of CORS massive users.
CORS; independent calculating; platform
P22
A
1008-1151(2022)10-0014-03
2022-05-30
冯振俭(1989-),男,南宁市自然资源信息集团有限公司注册测绘师,从事自然资源信息化前沿技术研究和成果转化工作。
猜你喜欢
测绘学报(2022年5期)2022-05-31
空间科学学报(2021年4期)2021-08-30
空间科学学报(2021年2期)2021-07-21
中国惯性技术学报(2020年2期)2020-07-24
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
北京航空航天大学学报(2017年9期)2017-12-18
雷达学报(2017年6期)2017-03-26
光学精密工程(2016年3期)2016-11-07
测绘科学与工程(2016年6期)2016-04-17
