术中导航伽马相机的开发与性能评估
2022-11-16 04:27许浒王璐瑶温小梅杨魁王仁生何亦辉
哈尔滨工程大学学报 2022年11期
许浒, 王璐瑶, 温小梅, 杨魁, 王仁生, 何亦辉
(1.中陕核核盛科技有限公司,陕西 西安 710100; 2.苏州大学 放射医学与辐射防护国家重点实验室,江苏 苏州 215123)
大部分实体肿瘤主要表现为通过淋巴系统转移扩散[1-2],传统外科手术中的系统性淋巴结清扫可能导致过度治疗[3]。前哨淋巴结(sentinel lymph node,SLN)活检结果能准确预测转移情况,从而使大量早癌患者无需淋巴清扫,避免并发症[4],且循证医学证据显示这部分患者的局部控制率和远期生存率与接受淋巴结清扫的患者无显著差别[3]。在精准外科下,SLN活检已是乳腺癌、黑色素瘤、头颈部肿瘤、妇科肿瘤等手术的标准组成部分[2,5]。
确保SLN活检成功率和准确性的核心问题之一是术中实时、动态的检测SLN[3],目前更多的还是依赖医生观察和触诊的方法[6]。随着影像学技术的发展,放射导向外科(radio-guidance surgery, RGS)为该问题的解决提供了可能[7-8]。从1990年起[9],核素示踪的手术导航技术在SLN活检的临床实践中广泛应用[5,10]。相比手持式伽马计数器(Gamma probe),基于伽马相机的核素显像通过可视化提高了SLN检出能力[11],在SLN显影方面有更大临床应用价值[12],近年来受到关注[7,10]。目前,一些小型化伽马相机的实验室和商业化系统已被开发[13],一种是手持式的(如CrystalCAM),另一类是连接在关节臂上的(如Sentinella),这些成像系统可以放置在手术室中[10]。SLN显像对伽马相机的系统空间分辨有要求[7],通常伽马成像的空间分辨和灵敏度是相互制约的[5],高空间分辨的术中伽马相机一般在灵敏度上表现不足[10]。然而,临床研究表明,SLN的检出率主要取决于伽马相机的灵敏度表现。目前,现有设备为保证检出率,需较长的采集时间来定位低活度水平的SLN[13],因此,在术中导航应用的实时性表现不够[5]。
基于闪烁晶体阵列和半导体光电器件硅光电倍增器(silicon photo-multiplier, SiPM)的像素型闪烁探测器具有空间分辨和探测效率高、时间响应快和信息测量准确、尺寸紧凑、低成本等特点,是能术中应用的切实可行且有潜力的伽马探测结构。针对SLN显影的临床手术刚需,本文采用YSO晶体和SiPM设计结构紧凑的高分辨像素型探测器,并兼顾灵敏度性能指标,选择与晶体阵列匹配的平行孔准直器,开发一套小型伽马相机原型机,以期实现对目标的高分辨、实时成像。
1 伽马探测器设计
相比半导体探测器,如碲锌镉(cadmium-zinc-telluride, CdZnTe),基于闪烁晶体的像素型探测器方案具有成本优势,更有利于伽马成像系统在术中导航领域的应用推广。碘化钠(sodium iodide, NaI)是目前广泛应用于单光子探测的闪烁晶体,但它易潮解,难以加工制造出像素型探测器。近年来,具有高光输出、衰减快速、无本底辐射、不潮解等优点的硅酸钇(cerium doped silicate yttrium, YSO)闪烁晶体在辐射探测领域受到关注,并且国内加工工艺成熟、成本可控。故本文采用基于YSO闪烁晶体的像素型探测器方案。考虑到SLN尺寸在1 cm以下[14],且可能紧挨邻近的淋巴结(<5 mm)[15],对伽马成像的空间分辨有较高的要求[7]。YSO由于不潮解,可加工出小于1 mm的像素单元,近年已成功应用于单光子成像系统[16],实现了高分辨成像。为得到较好的固有空间分辨,选用0.8 mm×0.8 mm×6.0 mm的YSO晶体条设计。根据术中导航所需的探测面积(5 cm×5 cm[13]),构建50×50的YSO晶体阵列。术中为便于医生操作,要求成像系统小型化,因结构紧凑的SiPM相比于光电倍增管(photo multiplier tube, PMT)有优势,本文选用SiPM面阵作为闪烁晶体阵列后端的光电探测器件。并且为了改善收集光的均匀性以及晶体条的分辨,在晶体阵列和SiPM面阵之间加入光导[17]。准直器方面,采用与晶体阵列匹配的平行孔准直器,为了使穿过准直器平行孔的射线大概率被探测单元检测到,而不是落在单元的间隔上,准直器的孔应与晶体阵列的晶体条一一对应[18]。根据上述几何匹配原则以及圆形平行孔准直器的经验公式[19]计算准直器参数,在厚度为5 mm时,间隔穿透率满足要求(<5%)的情况下,选取了孔径为0.65 mm,孔与孔中心间距为1.0 mm的设计。
2 伽马相机系统设计
2.1 伽马探测器研制
本文研制的伽马探测器单元,由一个50×50的YSO晶体阵列和一个8×8的SiPM面阵组成,中间通过光导而相互耦合在一起,如图1所示。
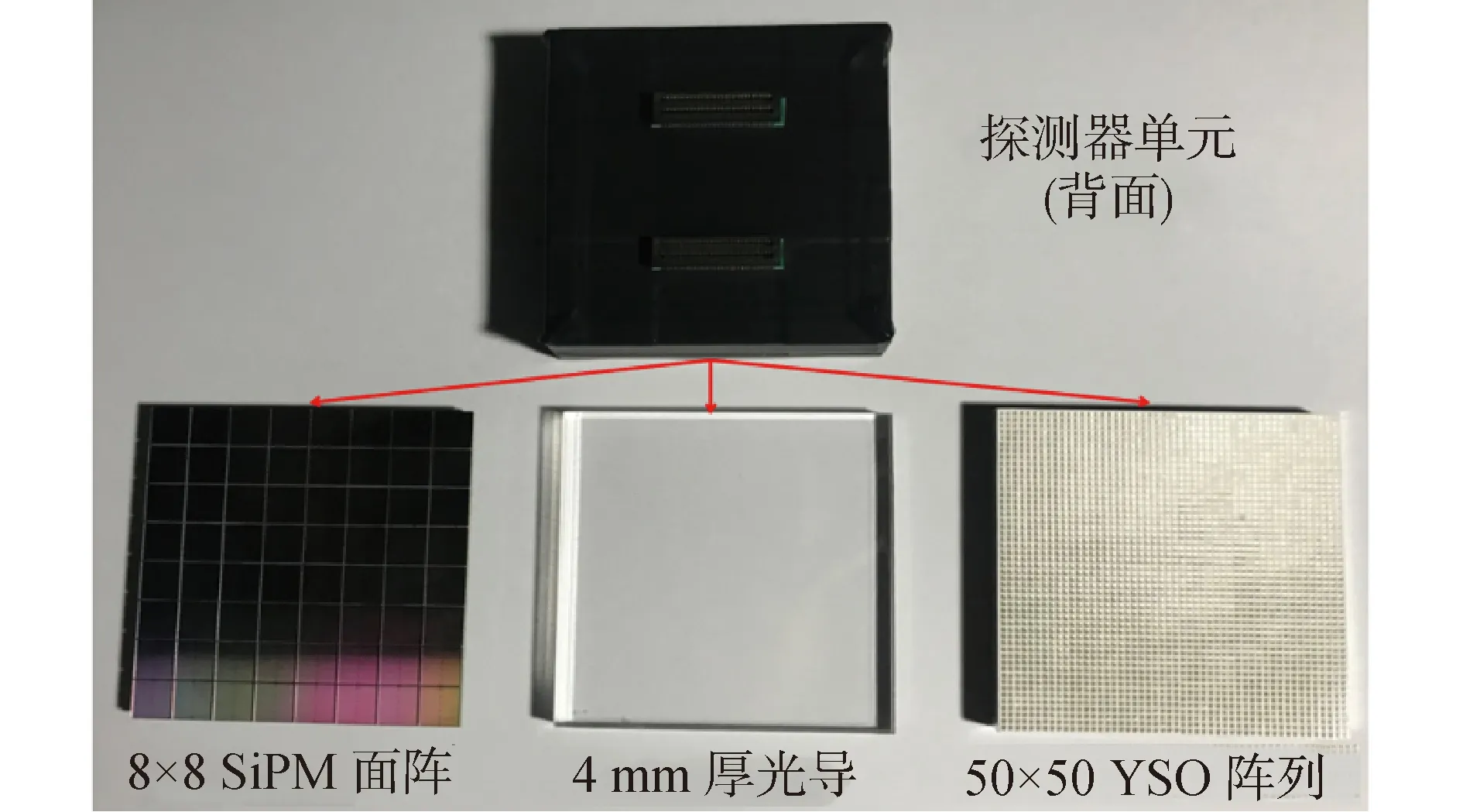
图1 伽马探测器单元组成Fig.1 Composition of the gamma detector unit
晶体阵列的每一个晶体条横截面尺寸为0.8 mm×0.8 mm,厚度为6.0 mm,6面都做抛光表面处理,除与光导耦合的晶体面外其他5面用0.2 mm厚的硫酸钡(BaSO4)粉末包裹,晶体条中心间距为1.0 mm。晶体阵列四周再各加0.2 mm厚的BaSO4粉末以及遮光铝箔包裹,最终横截面尺寸为50.64 mm×50.64 mm。SiPM面阵选用Onsemi公司的MICROFJ-60035-TSV,该SiPM感光面积为6 mm×6 mm,封装尺寸为6.13 mm×6.13 mm,相邻SiPM中心距离为6.33 mm,这样SiPM面阵的外围尺寸也为50.64 mm×50.64 mm。为维持稳定的SiPM工作电压,实验采用带温度反馈控制的电源板给SiPM面阵供电。针对SiPM面阵通道数较多的情况,基于电容多路复用的方法[20]开发位置编码板,将前端8×8的SiPM通道信号压缩为4个通道的位置编码信息,大大减少了信号通道数和电子学复杂度。形成如图2所示的基于SiPM面阵的光电探测模块。中间的50.64 mm×50.64 mm横截面积的光导为有机玻璃材质,采用全抛光的表面处理方式。光导厚度依据晶体尺寸和SiPM单元大小来选择。文献[17]采用3 mm×3 mm的SiPM单元解析约1 mm×1 mm的晶体,研究光导厚度对晶体分辨图的均匀性和对边缘晶体的分辨能力的影响,确定最佳光导厚度为1.5 mm,考虑到本文的SiPM单元大小约为晶体间距的6倍,所需光导厚度至少为1.5 mm的2倍。通过实验,比较了3、4、5和6 mm光导厚度的晶体分辨效果,确定最佳厚度为4 mm。
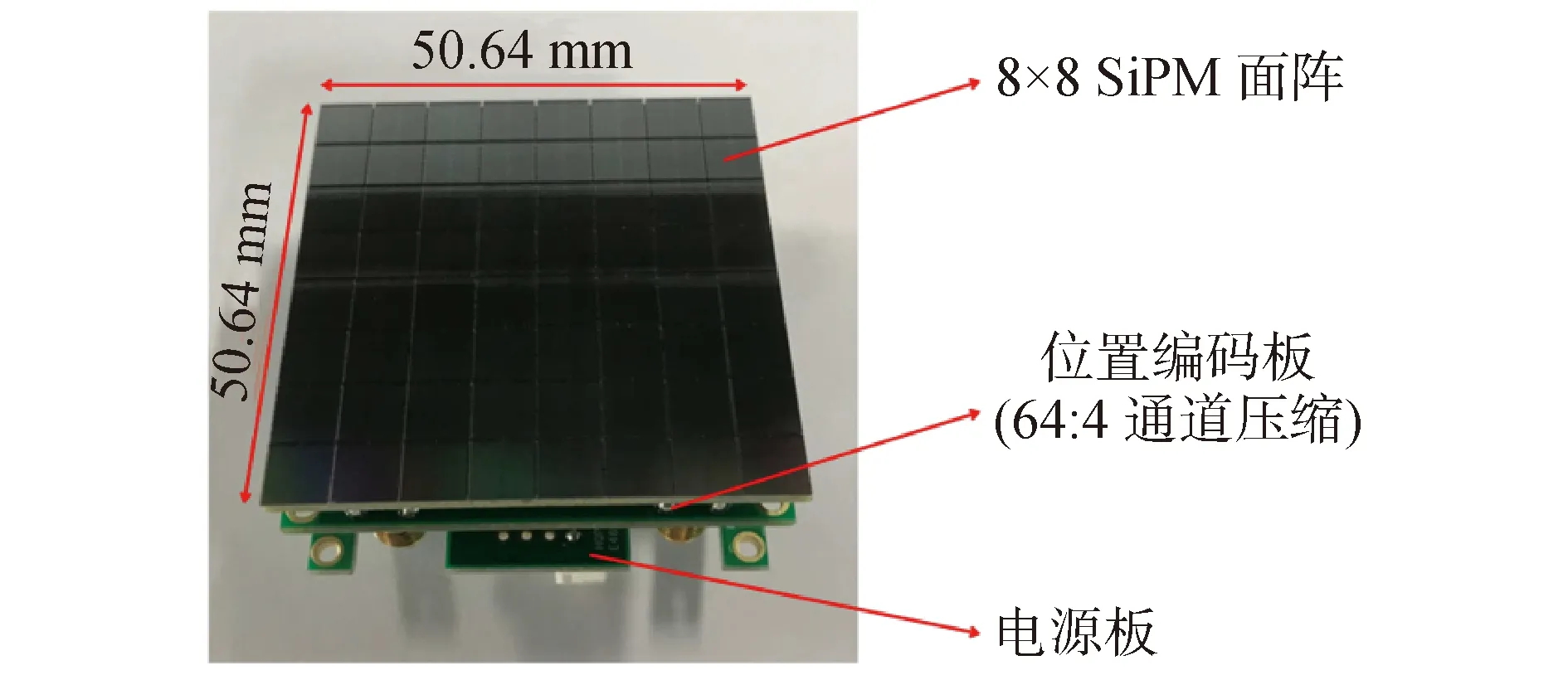
图2 基于SiPM面阵的光电探测模块Fig.2 Photo-detection module based on SiPM array
采用2个上述探测器单元,组成约50 mm×100 mm探测面的伽马探测器,具体参数如表1所示,能完全满足术中SLN显影对成像视野的要求。基于钨合金(95%W,3.5%Ni,1.5%Cu)材料自制准直器,通过机加工的方式加工圆形平行孔。将探测器单元前端的晶体条中心与准直孔中心一一对应后通过机械结构固定,封装在外壳里(如图3(a)所示),外壳内壁有1层2 mm厚的铅皮,可屏蔽其他方向的射线,以保证图像质量。组装后的伽马探测器(如图3(b)所示)的重量约为0.8 kg。
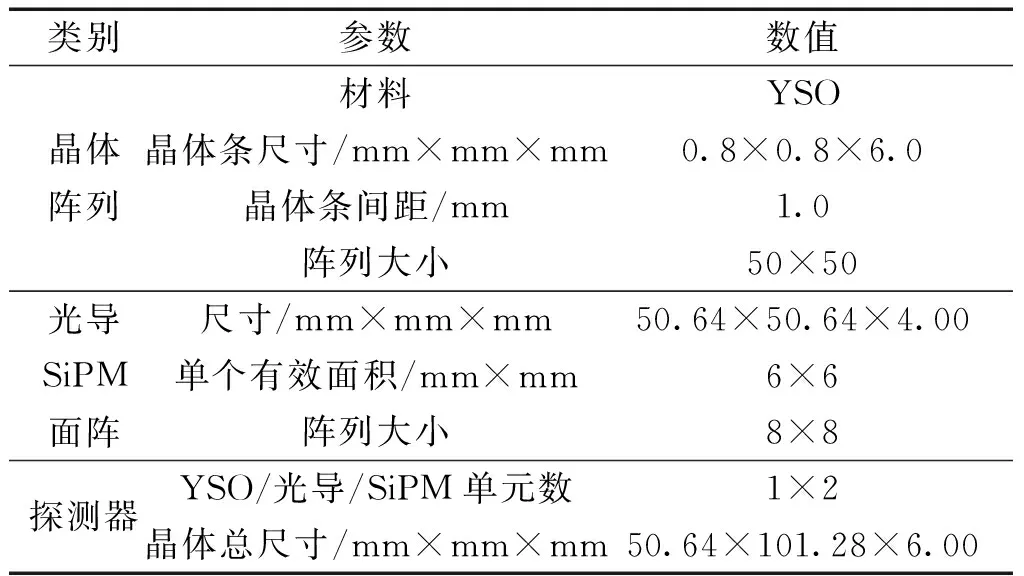
表1 伽马探测器参数Table 1 Specifications of the gamma detector
2.2 数据采集和后处理
基于像素型伽马探测器,进行数据采集和图像处理,集成如图4所示的一套术中导航用伽马相机原型机。对伽马探测器输出的4×2路脉冲信号放大和成形后使用50 MHz模数转换器(analog to digital converter,ADC)进行转换。并传输到现场可编程门阵列(field programmable gate array, FPGA)进行信息提取,通过重心法定位原理得到二维分布,同时求和得到能量信息。FPGA再将信息通过网线传至计算机,进行晶体分割、线性校正、能量校正和一致性校正的后处理,并通过平滑和双线性插值处理得到图像像素大小为0.5 mm×0.5 mm的最终平面图像。将一个22Na放射源放置在距探测器正上方约 20 cm处,均匀照射整个晶体阵列,得到探测器的晶体分辨图(如图5所示),探测器能解析大部分0.8 mm×0.8 mm横截面尺寸的YSO晶体,同时,图中显示出探测器中间即2个探测器单元拼接的地方存在探测死区。并通过实验测得在140 keV能量下探测器的平均能量分辨率约20%。
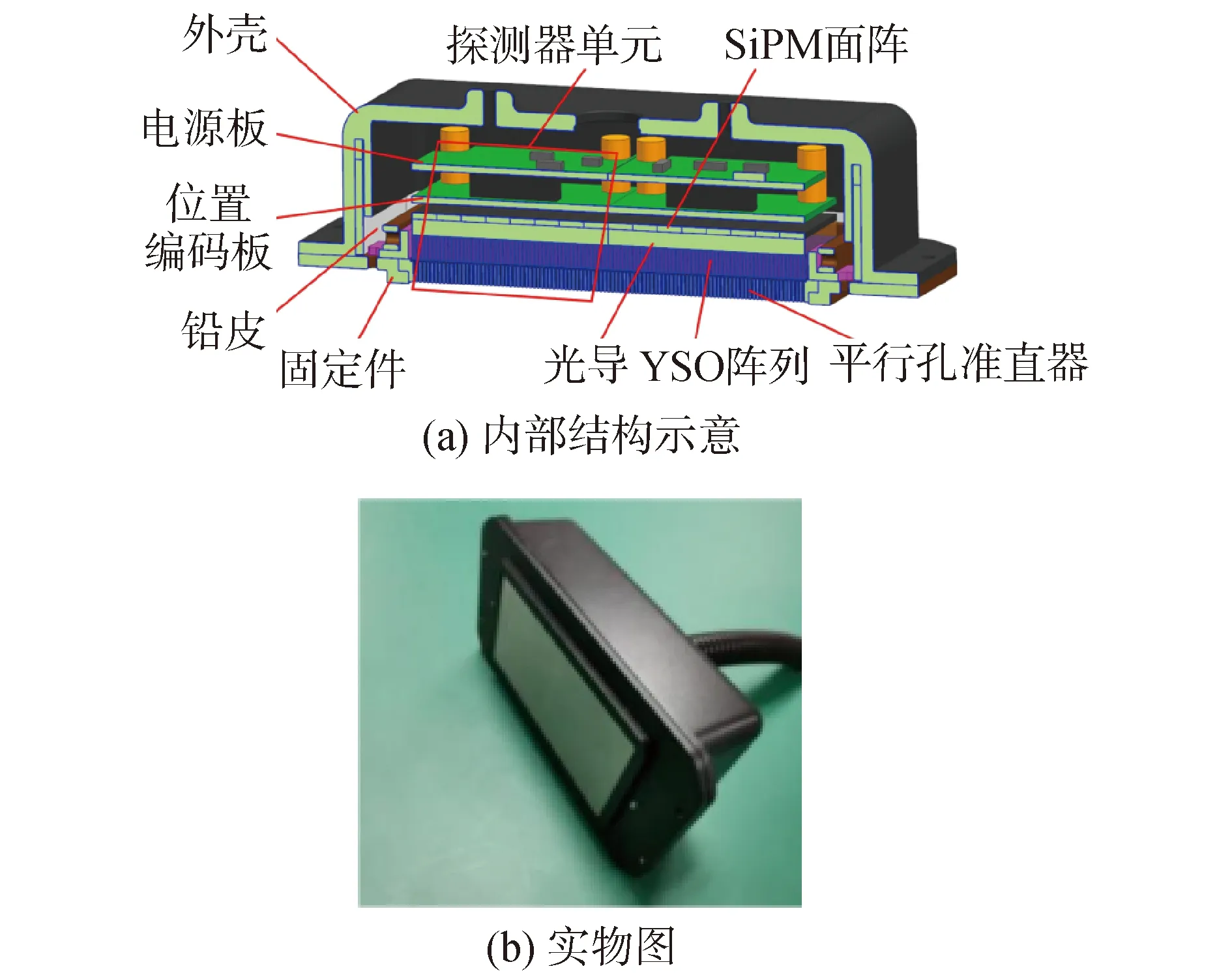
图3 伽马探测器Fig.3 Gamma detector
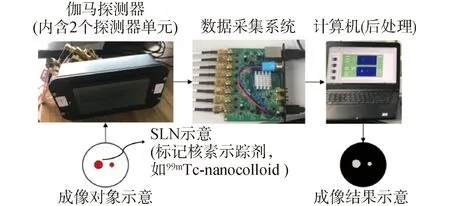
图4 伽马相机系统集成示意Fig.4 Integration schematic of the gamma camera system
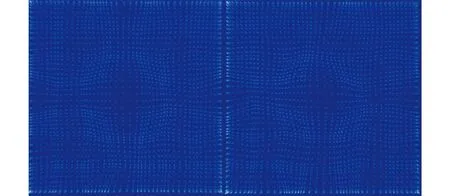
图5 晶体分辨图Fig.5 Flood histogram
3 性能评估与讨论
3.1 Micro Derenzo成像实验及结果分析
为了直观评价伽马相机的空间分辨能力,本文使用自制的Micro Derenzo模体进行成像实验。模体采用有机玻璃材质制成,整体呈圆形,直径3.5 cm,厚度0.8 cm,内部分为6个扇区:每个扇区内,有一组整齐排列的直径相同的小圆柱,相邻圆柱的孔心间距为圆柱直径的2倍。各扇区的圆柱直径尺寸从小到大依次为0.7、1.0、1.2、1.6、2.0、2.4 mm,如图6所示。
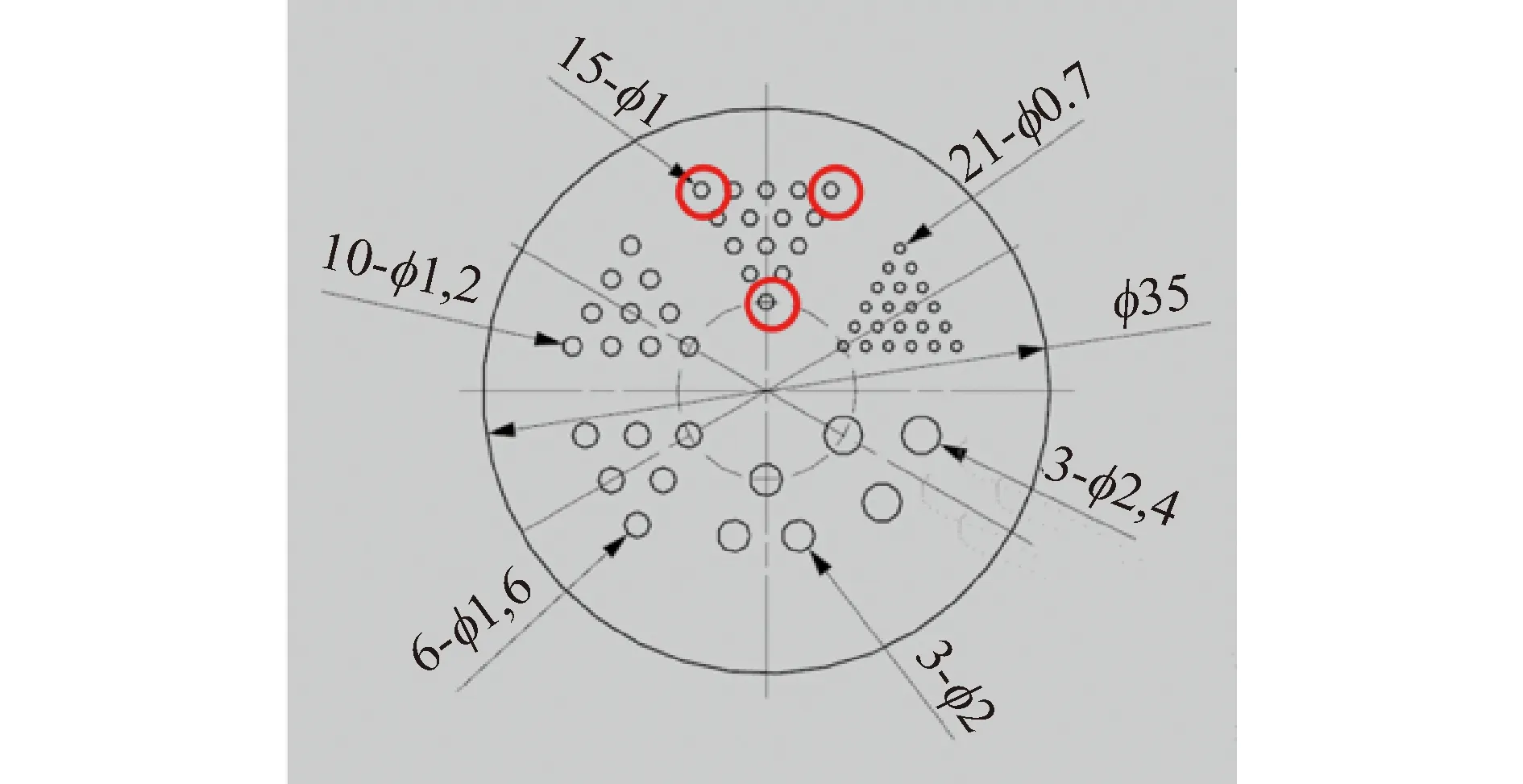
图6 Micro Derenzo模体Fig.6 Micro Derenzo phantom
首先将1.7 mCi的99 mTc放射源均匀灌入Micro Derenzo模体的每个孔内,然后将模体分别放在伽马相机的左边和右边进行2次成像实验(成像距离为距准直器正前方0 cm处),每次10 min,设置中心在140 keV能峰的30%能窗。对整个Micro Derenzo模体的成像图进行分析,从孔径最大的扇区开始,观察同一扇区内的相邻孔是否能视觉上直观区分,定性评价伽马相机的2个伽马探测器单元的系统空间分辨表现。Micro Derenzo模体在伽马相机的左边和右边的成像结果如图7所示。从结果可以看出,系统能清晰区分1.6 mm直径的柱源阵列。
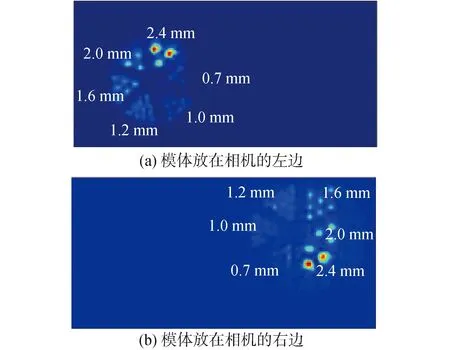
图7 Micro Derenzo模体图像Fig.7 Images of the Micro Derenzo phantom
同时,采用另一个Micro Derenzo模体,将99 mTc放射源注入到图6所示红色小圈内的3个圆柱孔(直径均为1.0 mm)内,总活度为589 μCi。在5 mm、3 cm的成像距离各进行2 min的图像采集,设置中心在140 keV能峰的30%能窗,通过计数剖面曲线分析系统的空间分辨表现。图8和9分别展示了5 mm和3 cm成像距离所对应的模体成像结果,分析红色虚线圈出的感兴趣区域(region of interest, ROI)对应的1 mm直径柱源的X方向计数剖面以评价空间分辨表现,计算得到 5 mm处的半高全宽(Full-width at half-maximum, FWHM)为1.83 mm,3 cm处的FWHM为3.45 mm。计数剖面曲线由1 mm点源卷积了探测器响应函数得到,实际的空间分辨要优于曲线对应的FWHM。从图中看到,剖面曲线有拖尾,这可能是因准直孔的平行排布,存在不同方向的孔间隔不一致的情况,从而导致点源图像出现各向异性。

图8 距离5 mm的模体成像图和计数剖面曲线Fig.8 Image of the Micro Derenzo phantom at 5 mm distance and count profile of the image
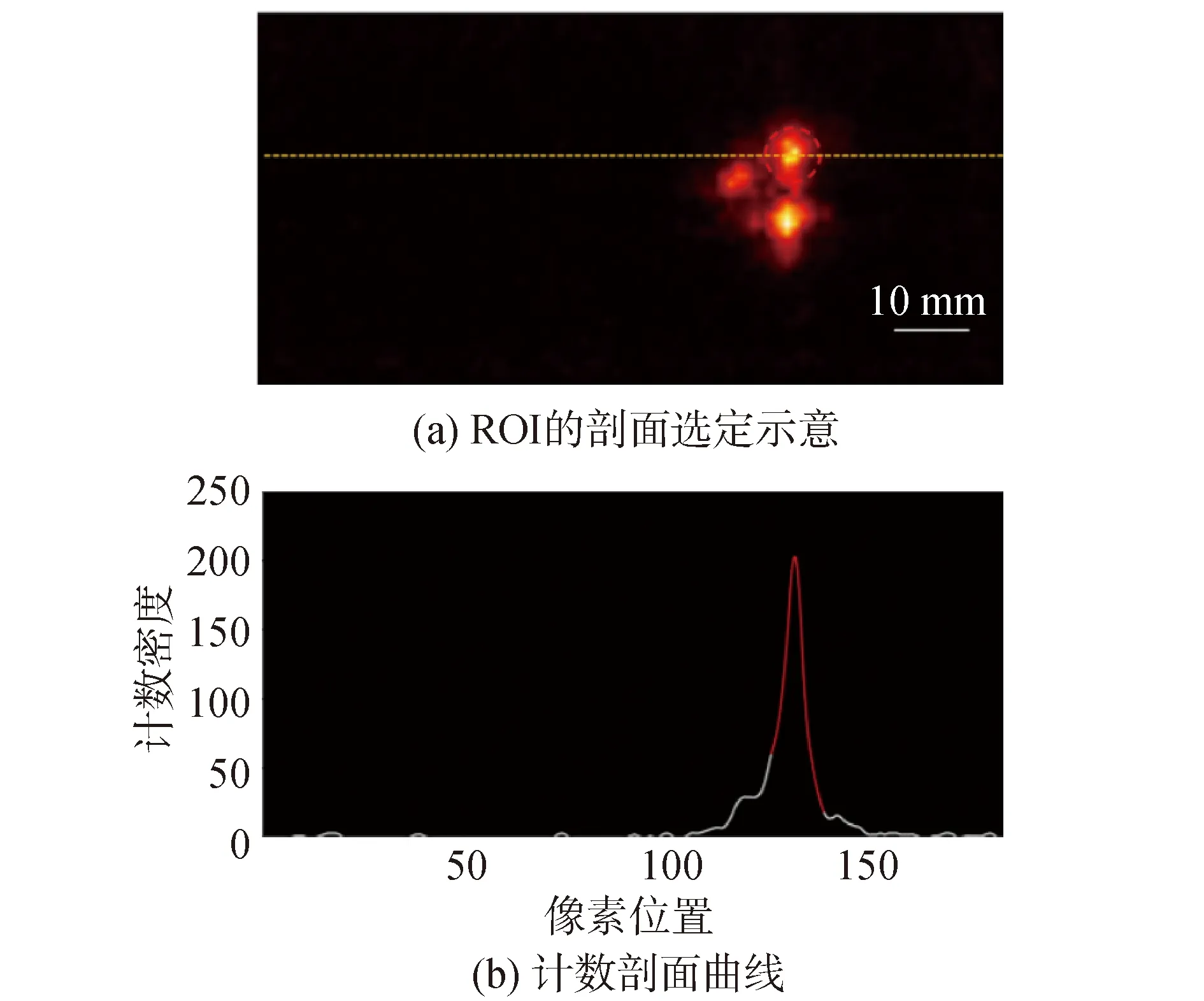
图9 距离3 cm的模体成像图和计数剖面曲线Fig.9 Image of the Micro Derenzo phantom at 3 cm distance and count profile of the image
临床常见的商用便携式伽马相机Sentinella[21]在3 cm成像距离的空间分辨为5.4~8.2 mm(取决于所选的针孔准直器规格)[13]。实验结果表明,本文所开发的伽马相机在3 cm成像距离时能清晰分辨中心间距8 mm的3个柱源(图8、9),表明其有用于术中导航SLN显影应用的可行性。
3.2 灵敏度实验及结果分析
参考小鼠SLN成像的放射性药物活度水平[4],取2个EP管,分别装入380 μCi和108 μCi的99 mTc放射源,固定于成像平台上,两者中心间距为3 cm,实验装置如图10所示。伽马相机记录2个EP管在不同成像距离、不同成像时间下的计数和图像。从图11可以看出,5 s成像时间下,2个EP管在12 cm远距离时仍可清晰分辨。结果表明该伽马相机的灵敏度适用于实时成像应用。相比左EP管,右EP管的图像分辨率下降,考虑到活度差异主要影响图像信噪比,并不会带来空间分辨的差异,分析原因可能是右EP管位置刚好在2个探测器单元的拼接处、存在探测死区造成的,后期将通过图像拼接的处理来改善。
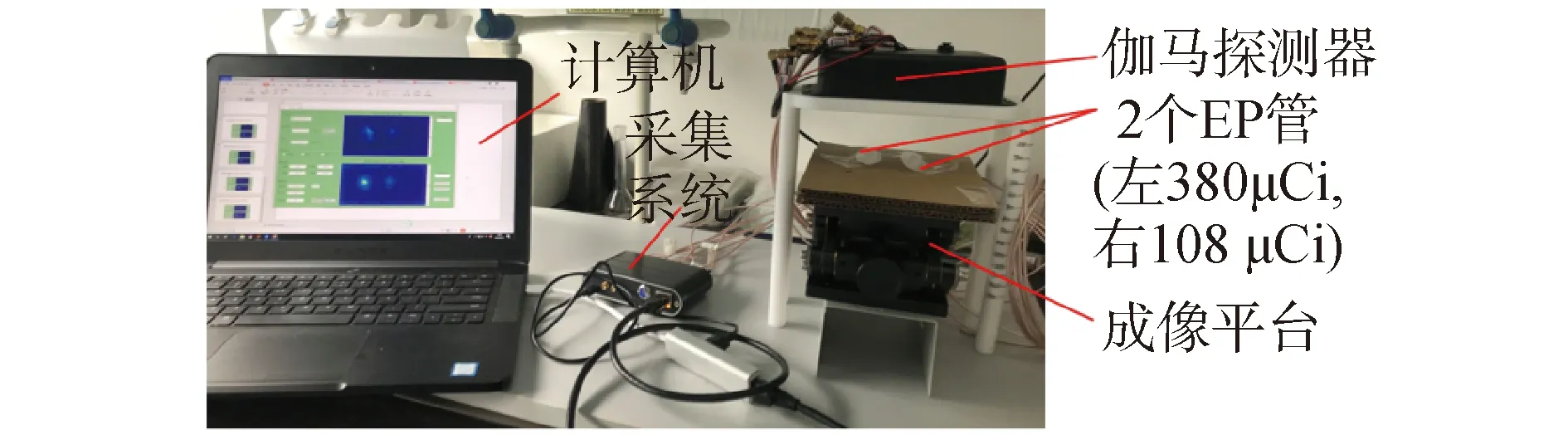
图10 灵敏度实验示意Fig.10 Illustration of the sensitivity experiment
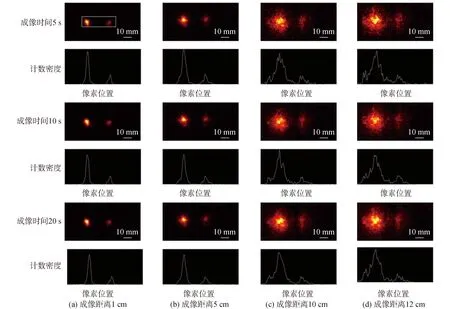
图11 2个EP管在不同成像时间(5 s,10 s,20 s)的成像图和ROI(白色虚线圈出区域)的计数剖面曲线Fig.11 Images of the two EP tubes and count profiles of the ROI (white dotted line) with different acquisition times (5 s, 10 s, 20 s)
对各成像距离下的60 s采集数据进行分析,在140 keV能峰下设定不同的能窗窗宽:20%、30%、40%,计算各能窗范围下的系统灵敏度,得到图12所示结果。
基于平行孔准直器,伽马相机的计数率都不会随着感兴趣的对象与准直器的距离而显著变化[18],平行孔准直器通常被认为可以提供更高灵敏度,特别是在远距离成像时[7]。图12的结果表明,灵敏度表现与理论基本一致。高灵敏度的Sentinella在临床实践中,为获得50 mm×50 mm的成像视野,通常需将相机放置在距离患者表面超过5 cm处[4],导致灵敏度下降到约0.5×10-4s-1/Bq[21],同时带来空间分辨的恶化(7.3~11.0 mm,取决于所用的针孔准直器规格)[13]。本文所开发系统在远距离(10~12 cm处)时仍能保持高灵敏度水平(99 mTc,能窗30%,为约1.5×10-4s-1/Bq);并且因采用平行孔准直器,成像视野一致,覆盖了术中导航SLN显影所需范围[13],无需为获得大成像视野采用远距离成像而造成关键性能恶化,表明其具有高性能成像能力。
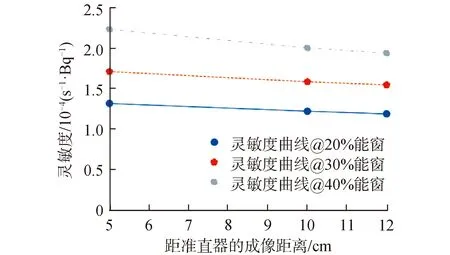
图12 不同成像距离下的灵敏度曲线Fig.12 Sensitivities measured at different imaging distances
4 结论
1)该系统有对SLN检出的应用能力,并能增强术中SLN显影的时效性,有望解决术中导航应用中SLN检出率和实时成像的矛盾。
2)在精准医学大趋势下,本文工作在恶性肿瘤的早期诊断和精准手术中具有应用前景,并且,5 cm×10 cm的探测面积还能扩展到其他应用,如隐匿性病变定位、临床前动物成像等。
今后将继续提高整体系统性能,主要从2个方面入手,优化探测器封装以及读出电路参数进一步改善能量分辨率;以及改善平行孔准直器的设计(排布和形状),并参考美国国家电气制造商协会(National Electrical Manufacturer Association, NEMA)标准[22]对系统性能进行全面评估和开展各种体模和临床研究。
猜你喜欢
橡塑技术与装备(2022年3期)2022-03-17
人工晶体学报(2021年10期)2021-11-26
石油管材与仪器(2021年1期)2021-04-13
数学学习与研究(2019年12期)2019-08-07
智能计算机与应用(2019年1期)2019-01-11
家庭影院技术(2018年8期)2018-08-21
中学生英语·阅读与写作(2017年1期)2017-02-10
自动化学报(2016年5期)2016-04-16
天津师范大学学报(自然科学版)(2014年4期)2014-02-18