
应用于潮汐车道的自适应移动护栏控制系统设计
2023-08-19 09:59张文琦徐发刚赵彬旭
电子设计工程 2023年16期
张文琦,徐发刚,赵彬旭
(1.南京航空航天大学 自动化学院,江苏 南京 211100;2.南京工程学院建筑工程学院,江苏 南京 211100;3.南京工程学院电力工程学院,江苏 南京 211100)
在智慧城市、智能交通的时代背景之下,提出了一种应用于潮汐车道的自适应移动护栏控制系统,该系统具有人工远程控制、根据车流量自适应控制的功能。该系统通过磁阻传感器检测车流量,经MCU 数据处理后与单片机建立通信,控制步进电机转动实现护栏的移动。可移动护栏配备摄像头检测模块与超声波传感器,当摄像头模块识别到地面导流线后反馈给单片机信息,控制电机锁死停转,超声波传感器用于紧急停止,保证车辆安全。系统设有无线收发模块,用以实现人机通信以及双机通信,符合未来智慧交通中无线通信的发展趋势。
1 系统设计
以城市主干道中的交通十字路口为例,利用自适应可移动护栏实现潮汐车道导流的功能。针对早、晚高峰时段城市主干道所呈现出的两侧车道拥堵程度不均衡的现象,该测控系统通过对特定路段内车流量大小进行检测,并与对向车道检测数据进行比较后,根据车流量大小选择护栏移动的方向。
系统应用场景如图1 所示。考虑到大多数城市主干道均设有中心隔离带,在对道路设施进行微小改造的前提下,将距离路口停止线约20 m 处的隔离带设置为可移动护栏,以便潮汐车道的车辆导流[2]。设由南向北所开辟的一组导流护栏为护栏组Ⅰ,由北向南所开辟的另一组导流护栏为护栏组Ⅱ,每组护栏都设定一个基准位置,即在双向车流量较为均衡的条件下每组护栏所处位置。该系统车辆检测电路由磁阻传感检测电路[3]组成,在道路两端相隔约200 m 处各设置一组磁阻传感器,得到以200 m 间距为代表的全路段车流量水平。若检测到由南向北更为拥堵,则护栏组Ⅰ向西移动至对向车道,道路南端子护栏引导车辆进入潮汐车道,而北端子护栏提醒对向来车不可侵占该车道。
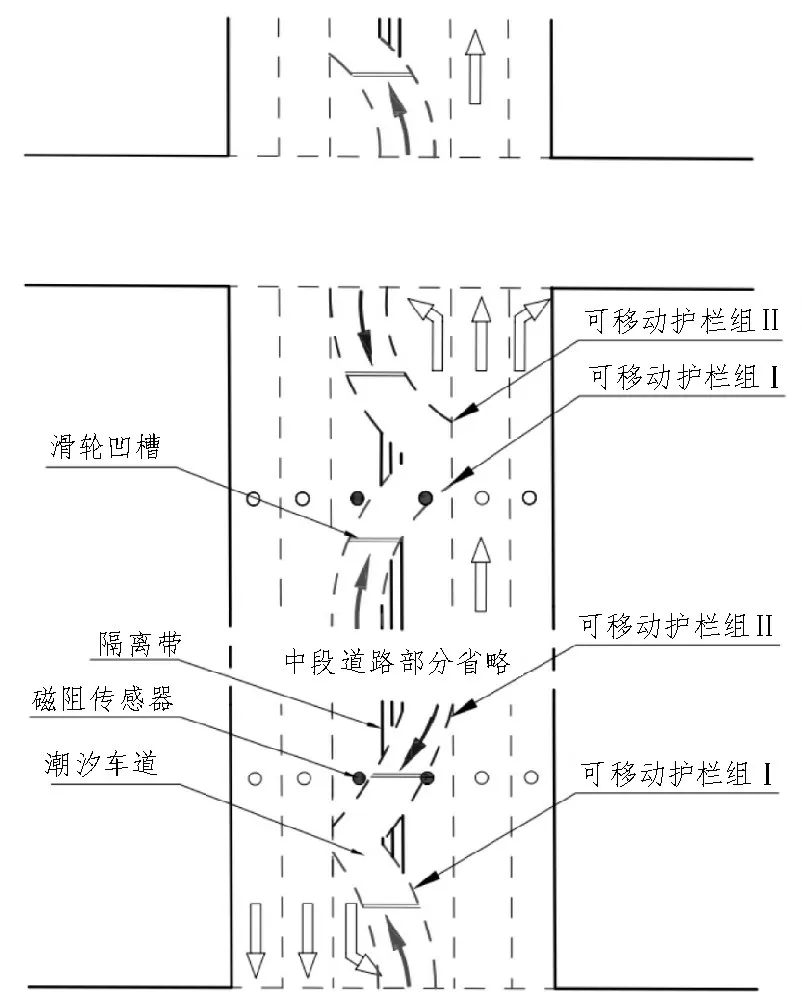
图1 系统应用场景图
由于可移动护栏设定为东西方向移动,为防止护栏纵向偏离预定轨道,需要在护栏中心位置加设一条滑轮凹槽,以确保护栏滑轮能够沿此槽东西方向移动。
系统功能设计如图2 所示,系统设置有人工控制和自适应控制模式[4]。当道路拥堵且有紧急情况发生时,通过人工控制暂时开辟潮汐车道紧急通行。系统默认工作在自适应的监测控制模式下,由磁阻传感电路输出计数脉冲,经由MCU 进行综合处理,控制可移动护栏组平行移动。另外,在护栏移动过程中,为防止出现护栏强行移动影响交通安全的情况,增设护栏组的紧急停止功能,提高其可操作性及安全性。

图2 系统功能设计框图
2 系统单元配置
实现人工控制功能时,采用PC 机无线网络中继端与MCU 以及护栏内单片机实现无线通信;在自适应控制功能下,采用磁阻传感检测电路完成脉冲的检测、采集与输出,由MCU 进行计数,并将同向路段的两组传感器所输出脉冲计数循环相减,即可得到路段内车流量的大小。MCU 根据两向车道车流量的不均衡度(设定不均衡差值阈值为N辆车)判断需要移动护栏组Ⅰ或Ⅱ,通过护栏内部的单片机系统控制步进电机以实现移动。为使护栏组具有自动停止功能,需要在护栏底部安装可识别导流线的摄像头模块,进行图像处理,反馈给单片机,控制步进电机停止转动。护栏移动过程中,超声波传感器检测周边环境安全,并有警示灯闪烁提醒。系统模块组成如图3 所示。
对臭牡丹粗提物进行正负两种模式质谱扫描,结果显示负离子模式下响应信号强,分辨率高,因此选取负离子模式进行质谱分析,图2为臭牡丹粗提物的总离子流图.
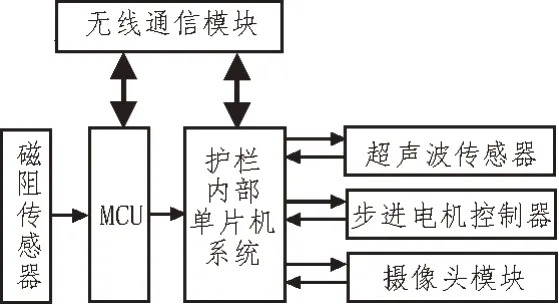
图3 系统模块组成
2.1 无线通信模块
相较于传统的总线串口通信技术,人机之间采用无线通信方式[5]可减少交通路口的布线密度,增加传输距离,能够适应未来“智慧交通”智能化、无线化的趋势。
为使控制终端PC 机能够与护栏内置单片机系统进行远程无线通信,需要通过收发模块RF418 实现两者之间的数据异步串行无线传输。RF418 模块将数据的电平信号转换成无线电信号,以一定频率的电磁波实现无线通信,因其无线传输距离相对有限,一般可实现约5 km 的无线通信,此系统中应在各应用路口设置与PC 机、MCU 相配套的无线网络中继器,以将PC 机或MCU 所收发的通信信号实时发出。
如图4 所示,PC 机通过无线中继器与MCU WIFI 模块[6]实现通信,MCU 通过RF418 与护栏内部单片机实现通信;护栏内部单片机的RXD 引脚和TXD 引脚要与RF418 的RX 引脚和TX 引脚对应相接,达到逻辑电平一致,实现人机交互功能。

图4 无线通信网络
2.2 磁阻传感器
车流量的实时监测是实现可移动护栏自适应控制的重要环节。目前对于车流量检测技术的探索与应用,主要包括红外检测技术、电磁涡流线圈检测技术以及视频图像处理技术等。现有的红外检测传感器易受外界热源干扰,对于车辆检测脉冲误差较大;涡流线圈传感器需要埋于地下,不易安装,且寿命短、易损耗;新兴的视频图像处理技术易受天气影响,尤其在雾天检测精度大幅降低。而对于磁阻传感器[7]而言,不需要大面积破坏路面,检测半径约为2 m,恰好适合各车道的车辆计数,且受天气、热源等干扰影响极小,具有寿命长、不易损坏、功耗低的优点,因而选用磁阻传感器来监测路段车流量的情况。
磁阻传感器电路设计如图5 所示。磁阻变化经惠斯通电桥[8-9]调理电路转化为差分电压的输出,由差动放大电路初步综合放大,在模拟信号进入ADC之前利用隔离放大电路滤除不必要的干扰影响,提高共模抑制比。A/D 转换器选用ADC0832 芯片,该转换器具有8 位分辨率,兼容性强、性价比高,转换时间仅32 μs,且具有两个模拟输入通道,能够同时输入两个传感器节点的模拟信号Ui0、Ui1。

图5 磁阻传感器电路设计
A/D 转换得到数字量,因车辆经过磁阻传感器正上方或经过磁阻传感器一旁时,所转换的电压值不同,可通过实验得到两种情况下适用的电压输出阈值M,保证一个磁阻传感器仅可测定一辆车,即尽量避免一辆车被两个磁阻传感器同时计数的情况。MCU 将输入的数据与电压阈值M进行比较,若输入值大于M,则该端传感器电路计数加1,将前端磁阻传感器所计数与后端磁阻传感器所计数循环相减,即可得到车流量水平大小。最后将此差值与所设定的两向车道车流量不均衡的判断差值阈值N进行比较,判断应对哪组步进电机进行控制。
2.3 护栏控制微处理器
为满足步进电机的存储要求,与摄像头模块图像存储处理功能相适应,实现与超声波传感器电路的交互,多I/O 口精确控制多个步进电机的协同运转或停止,并实现与MCU 的交互通信,护栏单片机系统采用MSP430FG4618 单片机[10]。该单片机配置了116 kB Flash 和8 kB RAM,具有多个晶振频率可供选择,相对同位数的单片机芯片成本较低,且具有多种指令,适用于数据及脉冲的计算和处理,可较好地应用于实时控制系统中的外围终端设备。
2.4 控制电机
选用单片机控制的步进电机[10-11]为驱动电机。实现多个护栏协同定向移动时,需要对多个步进电机转动步数进行协同控制,并在紧急停止时可同时实现停止转动。
在步进电机工作时,需要步进电机驱动器的配合,将其所接收到的控制电平与方向信号综合,结合自身逻辑电路,确定绕组时序方向。不同的通电方向可以实现步进电机的正、反转。为使各段护栏能够协同前进,需要单片机对不同电机实时输出总线控制信号。通过MCU 或PC 机与护栏单片机系统间的无线数据传输,实现自适应模式和人工控制模式的切换。
在MSP430FG4618 单片机控制步进电机的程序编写中,需要使之产生特定频率的脉冲信号,并使用定时器设置中断反应,以控制、检测步进电机前进的步数。因步数控制误差较大,所以当单片机判断出摄像头模块已检测到路面导流线边缘时,随即控制步进电机锁死停转,步数计数清零,即到达潮汐车道引流护栏设定位置。
2.5 摄像头模块
通过控制步进电机前进步数来控制护栏移动的方法有较大的误差,因而需要在护栏的下方加装摄像头模块,当摄像头模块检测[12]到地面导流线边缘时,护栏停止移动。对于夜间等光线较暗的时段,要求摄像头具有感受光强及LED 补光的功能。该功能的实现需要用到光线传感器模块,由单片机控制LED 灯终端的开启状态。
摄像头模块需要对图像中的导流线边缘进行检测,因导流线边缘可近似视为直线,选用Hough 变换法[13]对图1 中护栏组下方导流线进行检测,可以取得较好的检测效果。因路面并非光滑平面,图像中存在较多噪声点,在进行Hough 变换之前,需要使用中值滤波滤除高频椒盐噪声。
Hough 变换的基本思想是利用两空间的对偶关系,将待识别直线由图像空间变换到参数空间,即将求直线问题转化为求点问题。设图像空间中的边缘线方程为:
Hough 变换将图像空间中的任意一点(xi,yi)映射到参数空间(a,b)中的一条直线上,并经过一点(a0,b0),则参数空间中一点(a0,b0)唯一对应图像空间中由式(2)表示的一条直线:
利用Hough 变换检测出边缘线典型方程,通过参数空间点坐标的测算即可获取导流线与护栏的相对位置。当系统在参数空间检测到相应的坐标值时,即判断到达导流线,护栏定位成功,并由单片机向步进电机驱动器发出控制指令。
2.6 超声波传感器
与MSP430FG4618 单片机相连的超声波传感器电路[14]具有感知车辆靠近的功能。当护栏在移动过程中有车辆经过且距离护栏较近时,超声波传感器电路向单片机发出高电平信号,由单片机控制步进电机作出紧急停止的动作,待计时结束车辆驶离后,控制步进电机继续运转。
3 系统控制方法
将该方法应用于潮汐车道的可移动护栏控制系统,首先根据MCU 检测和处理上位机所发出的外部指令,选择进入人工控制模式、自适应智能控制模式或强制关机、紧急避险模式。
系统控制方法设计如图6 所示。在人工控制模式下,MCU 根据外部指令,选择护栏的定时移动或是紧急状态下的人工实时控制。在自适应控制模式下,MCU 对磁阻传感器电路所发出的计数脉冲信号进行统计,得到某路段两方向车道的实时车流量大小。设该路段由南向北车流量计数为TN,由北向南车流量计数为TS,当TN>TS或TS>TN时,MCU 与护栏内MSP430FG4618 单片机进行双机通信,启动对护栏组Ⅰ或护栏组Ⅱ的控制。

图6 系统控制方法设计流程图
单片机得到启动指令后,通电并控制步进电机驱动器使护栏沿滑轮凹槽向特定方向移动。在护栏移动过程中,由超声波传感器检测是否有对向车辆侵入该潮汐车道,若有,则实施紧急停止,避让来车,并延时10 s,继续控制步进电机转动;摄像头模块将路面图像实时存储到单片机存储器中,经图像处理判断某时刻护栏是否到达设定位置,若检测到边缘线,则单片机控制步进电机锁死停转。
可移动护栏的每种位置状态由护栏内部的MSP430FG4618 单片机无线传输给MCU 进行中继汇总并传输给PC 机控制终端,以便及时人工调度和调整。当护栏移动动作完成后,磁阻传感器仍继续监测车流量,但由于潮汐车道借用了一个对向车道,即此车道上的两个磁阻传感器检测到的车流量属于与潮汐车道设定方向同向道路的车流量,需要对MCU设置计数分离功能。计数分离是指当MCU 接收到单片机所发出的护栏位置信息时,及时调整传感器的计数方法,将潮汐车道中的计数值并入与之同向车道的计数值中,而后程序不变。
4 仿真分析
4.1 磁阻传感器信号放大电路仿真分析
为模拟车辆经过时磁阻传感器信号放大电路的输出电压,可以通过改变图5 中单臂电桥上Rd阻值来模拟磁阻传感器感应到磁场时的输出[8]。设置合适的Rd阻值,运用Multisim 进行仿真,把示波器两输入端分别接入电桥输出,将另一输入通道连接隔离放大器输出端,仿真结果如图7 所示。
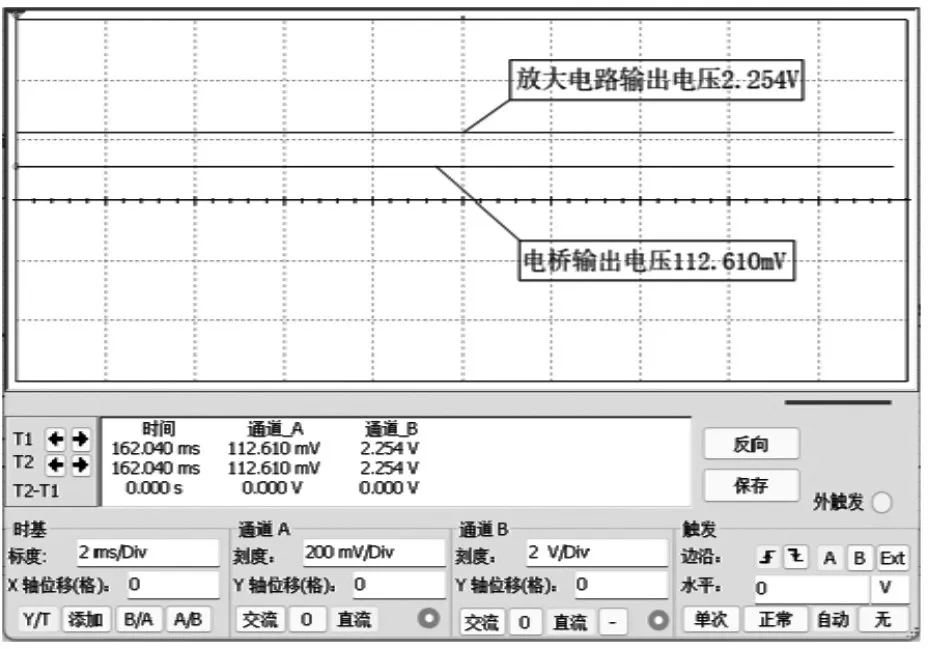
图7 仿真结果
由仿真结果可以得到输出电压增益Kf≈20,输出电压始终处于1~4 V 之间,符合ADC0832 的输入要求。
4.2 边缘线检测
护栏发出停止指令前,采集到原始图像,将其转换为灰度图后,需要中值滤波才能将路面的输入噪声去除。选择50×50 的像素区域作滑动窗口,得到中值滤波后的图像,如图8 所示。
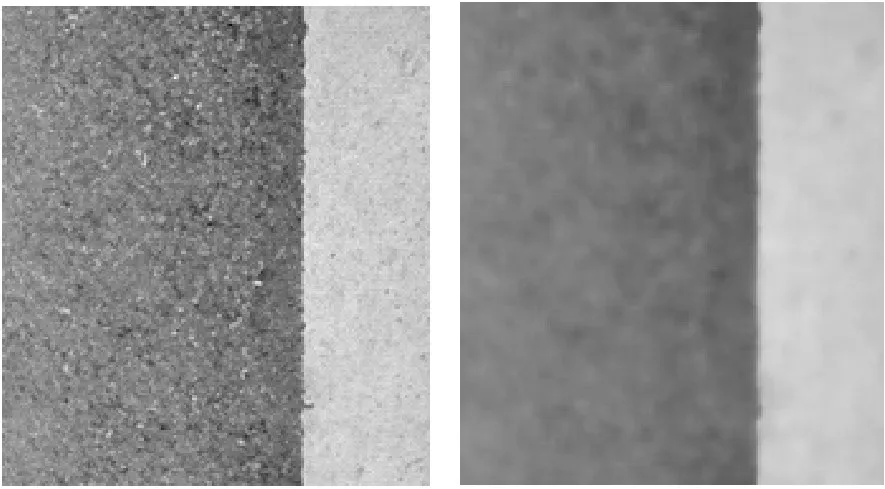
图8 原图及滤波后图像
Canny 边缘检测算子[15-16]的输出效果好,失误率低,采用高斯滤波器对噪声进一步平滑处理,提取出边缘线。通过对Canny 边缘检测输出图片进行Hough 变换,得到已标记出直线段的变换图像。
经实验仿真,系统由摄像头模块采集的数字图像,使用中值滤波去除其尖脉冲干扰及椒盐噪声,经Canny 算子边缘检测后,使用Hough 变换能够准确地检测出边缘线,由此可以准确控制护栏运动状态。

图9 Canny 边缘检测及Hough 变换图像
5 结束语
该自适应系统采用磁阻传感器实时监测车流量,根据道路两侧车流量的不均衡程度判控制护栏组Ⅰ或Ⅱ的移动,并运用数字图像处理技术检测导流线边缘,实现移动护栏的自动停止。另外,系统设置超声波探测器用作保护机制,采用人机无线通信以及双机无线通信,能够适用于未来车联网的功能拓展,符合智慧交通无线、智能控制的趋势。自适应可移动护栏应用于潮汐车道,具有无线化、智能化的显著优势,能够缓解高峰时段所导致的单向车道拥堵的状况,有利于促进节能减排,构建绿色、智能的交通系统。
猜你喜欢
防爆电机(2021年4期)2021-07-28
中国交通信息化(2020年7期)2021-01-14
电子制作(2019年20期)2019-12-04
小学阅读指南·低年级版(2018年5期)2018-11-02
电子设计工程(2017年20期)2017-02-10
公民与法治(2016年16期)2016-05-17
数学教学通讯·初中版(2015年5期)2015-06-17
电机与控制应用(2015年1期)2015-03-01
中国交通信息化(2014年6期)2014-06-05
电视技术(2014年19期)2014-03-11
