基于机载LiDAR系统的电力线点云提取方法研究
2023-09-05 02:04张智前叶周润肖信峰
合肥工业大学学报(自然科学版) 2023年8期
张智前, 叶周润, 欧 鑫, 肖信峰
(合肥工业大学 土木与水利工程学院,安徽 合肥 230009)
0 引 言
我国国土面积辽阔,人口数量基数大。近年来随着国民经济的不断发展,架空输电线路里程不断增加,电网结构日益复杂,长距离输电线路电力巡检面临着极大的挑战。传统的电力巡检方式存在人员危险度高、人力物力消耗大、效率低下等问题,而无人机机载激光雷达技术可以快速自动高效获取地面地物高精度三维点云信息,在电力巡检方面具有快速化、低成本、低危险性等优势,因此近年来无人机机载激光雷达技术在电力巡检方面得到了广泛的应用。
目前,无人机电力巡检主要分为电力线提取[1-6]、电力线危险高度分析[7-8]以及电力线三维重建[9]3个方面,其中电力线提取作为主要研究内容近年来受到国内外众多学者关注。文献[10]将电力线点云投影到XY平面后使用K-means进行聚类提取;文献[11]将电力线点云分段投影到XY平面后使用RANSAC提取;文献[9]将电力线点云投影到平面进行二维Hough变换,再使用分段K均值聚类采样精提取。上述文献均将点云投影到平面再进行处理,存在绝缘子处提取效果差且易将多根电力线错分为1根的问题。文献[12]对整体点云进行子空间分割处理后根据密度特征提取;文献[13]对原始点云进行子空间分割后基于倾斜角度平均值提取。上述文献均对点云进行子空间分割,解决了地形起伏问题但存在处理效率低的问题。文献[14]分离出候选点后将其转化为二值化图像并进行形态学优化,再使用区域增长精细化提取;文献[15]对整体点云垂直处理预测电力线位置并使用3D区域生长法分割候选点;文献[16]通过寻找种子点使用区域生长法提取。上述文献均使用区域生长法提取电力线点,存在无法精确提取绝缘子点与对原始点云密度要求较高的问题。文献[17-19]使用随机森林以及马尔科夫随机场通过自举样本学习,采用机器学习方法提取,准确度较高且处理速度快,但存在需要大量训练样本与先验知识且对不同环境适应能力差的问题。
针对上述问题,本文提出一种新型电力线点云提取方法。对点云分块采用改进的迭代高程阈值法滤除地面点与大部分地物点,解决了因地势起伏过大引起的传统高程阈值法滤波效果差的问题;对于滤除杆塔点时存在的将电力线点误分到杆塔点的问题,通过结合点云高程搜索将误分的电力线点提取出来。
1 激光雷达电力线提取
本文提出的基于机载LiDAR系统的电力线激光雷达点云提取方法流程如图1所示。该方法首先按点云走向依据距离进行分块,采用迭代高程阈值法滤除地面点与大部分地物点;然后对于含杆塔点的分块点云,使用DBSCAN密度聚类滤除杆塔点,其中被误分到杆塔类的电力线点结合高程变化提取出来;最后采用欧式聚类方法对整体电力线点进行精细提取。
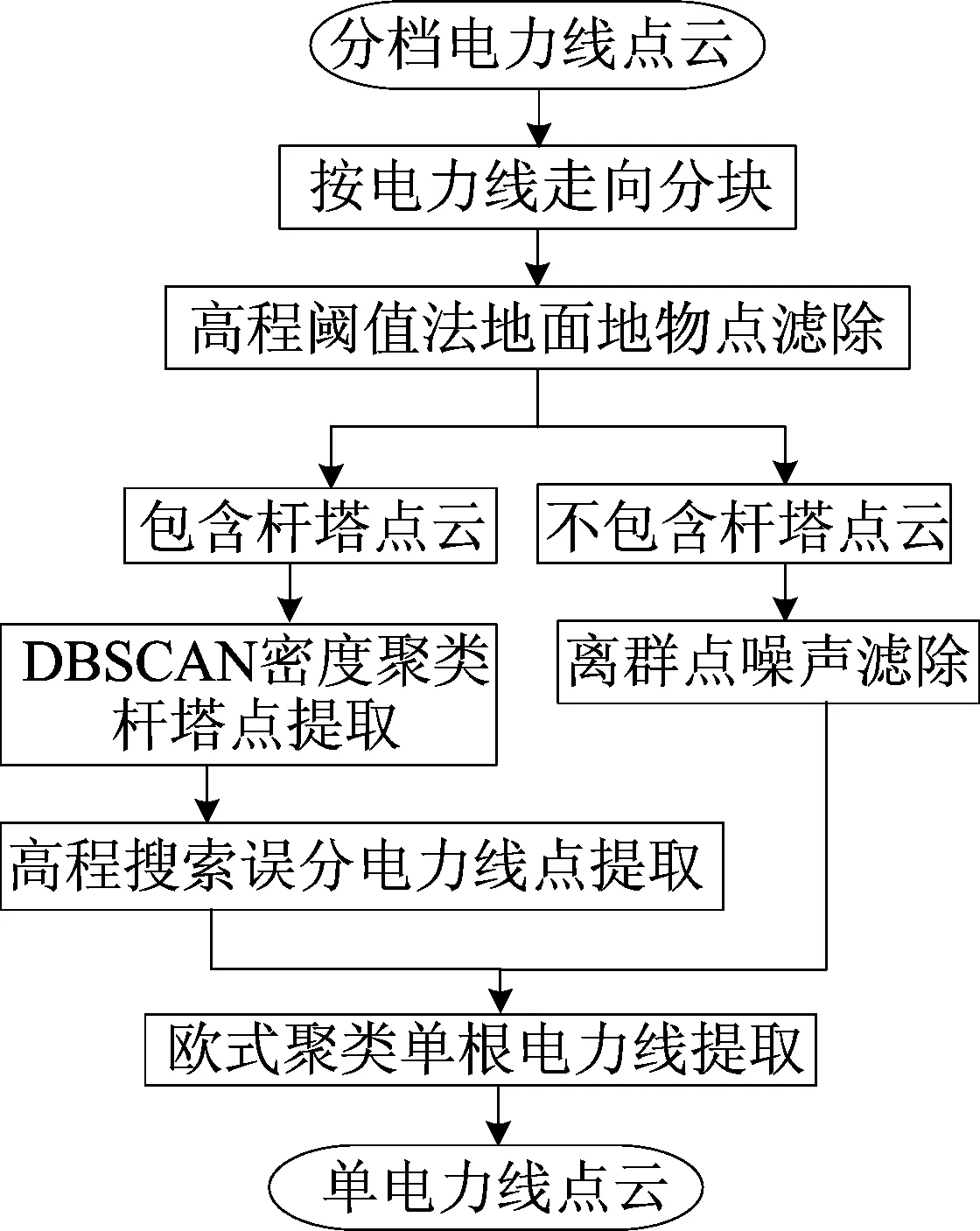
图1 电力线点云提取流程
1.1 整体点云分块
机载激光雷达所获取的点云数据主要包括电力线、电力杆塔、植被房屋和地面等,由于点云数据量大,对整体点云进行处理效率低;同时对于地势起伏较大的数据使用传统高程阈值法滤除地面地物点,会存在地势较高处地面地物点无法滤除或滤除效果差的问题。针对这一问题,对整体点云依据电力线走向进行分块处理。
1) 电力线走向判断。目的是确定分块方向,防止将电力线纵向分割。先对整体点云的最大最小XY坐标进行计算,再计算最大最小XY坐标的差值Δxy确定电力线走向是X方向还是Y方向。Δxy计算公式如下:
Δxy=(Xmax-Xmin)-(Ymax-Ymin)
(1)
其中:Xmax、Xmin分别为最大和最小X坐标;Ymax、Ymin分别为最大和最小Y坐标。当Δxy为正值时,将点云按照X走向进行分块;当Δxy为负值时,将点云按照Y走向进行分块。
2) 确定分割距离分块。目的是解决因地势起伏较大引起的地面地物点难以滤除的问题。选择合适的分割距离对于后续处理至关重要,分割距离过大会导致分割效果不明显,分割距离过小会加重程序运算的负担影响效率,一般分割距离选择为50 m,根据地形起伏坡度大小的不同可适当增加或减少分割距离。
1.2 电力线粗提取
粗提取的目的是为了滤除地面点与大部分的地物点,为下一步的精提取打好基础。电力线粗提取采用迭代高程阈值法对分块点云进行处理,处理流程如下:
1) 点云平均高程计算。计算出点云的平均高程H作为分隔阈值将点云分割为上下点云,H的计算公式如下:
(2)
其中:hi为第i点云高程;n为总点云数量。
2) 上下点云分割。以点云平均高程为阈值分割上下点云,上点云为电力线点云,下点云为地物地面点点云。
3) 上下点云平均高程均值计算。分别计算上下点云平均高程,再求出其均值Hm,Hm计算公式如下:
(3)
其中:Hu为上点云平均高程;Hd为下点云平均高程。
4) 最佳阈值迭代计算。将上下点云平均高程均值Hm作为步骤1)中的点云平均高程H,继续步骤2)和步骤3),迭代计算直至收敛,最后获得的平均高程为最佳高程分割阈值,分割所获得的上点云即为单一的电力线点云。
1.3 电力线精提取
经过粗提取之后,包含电力杆塔的点云存在电力线点、绝缘子点与部分杆塔点,需要单独进行处理。在滤除电力杆塔的过程中存在将部分与杆塔相近的电力线点误分到电力杆塔的情况,为了更精细完整地提取电力线点,需将误分的电力线点与绝缘子点分离,进而提取完整的单根电力线。
1.3.1 误分杆线聚类分离
为了完整地将电力杆塔进行滤除,使用DBSCAN密度聚类提取杆塔点云,扫描半径的设置不可过小,否则会存在将部分与绝缘子相连接的电力线点云误分到电力杆塔类的情况。电力杆塔的结构导致其在同一水平坐标下有多个不同高程点云,而误分电力线点云由于是架空线在不同的水平坐标下只存在一个高程点云,因此可以对分类的杆塔点云进行高程搜索,进而将误分的电力线点云分离出来。高程搜索原理如图2所示,处理流程如下:
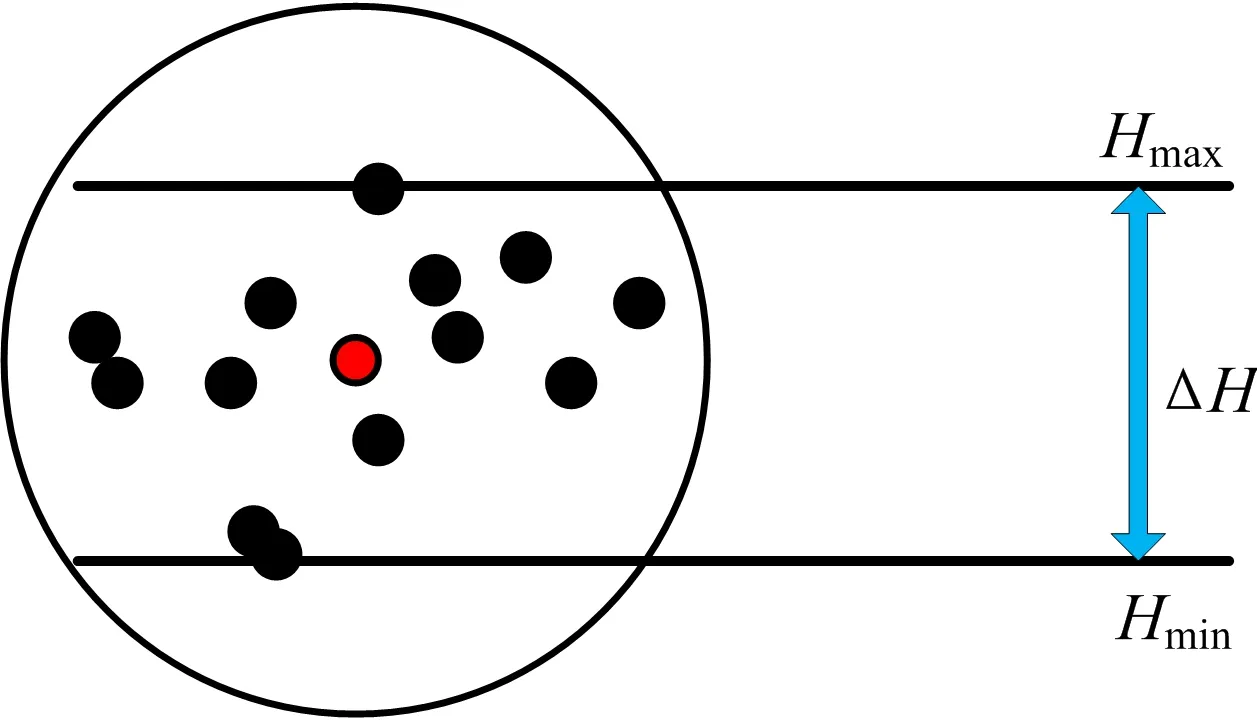
图2 高程搜索原理示意图
1) 设置搜索半径r,半径内最小点的数量minPts,最大点的数量maxPts,遍历搜索点云,若目标点云搜索半径内点的数量小于minPts或大于maxPts,则将其标记为噪声点。
2) 剔除所有噪声点云。
3) 随机提取一个非噪声点为种子点,对此种子点进行半径搜索,统计搜索半径内点云最大最小高程。若最大最小高程差小于0.5 m,则将此种子点与其搜索半径内所有点云归类到误分的电力线点云类中;否则将其归类到电力杆塔点云类中。
4) 设置新的种子点,重复进行步骤3),直至所有非噪声点完成分类。
1.3.2 电力线聚类
将电力杆塔进行剔除之后,所保留的点云为电力线点和部分杆塔噪声点。由于每根电力线相互平行且间距较大,若要得到完整的单根电力线,可以使用欧式聚类的方法对单根电力线进行精细提取。欧式聚类根据点与点之间的邻近距离来判断两点是否属于一类,对于平行电力线的几何空间特征,可以有效地将单根电力线进行提取,对多根电力线分割效果明显。欧式聚类提取流程如下:
1) 随机选取一点作为种子点,设置搜索半径进行搜索,将所有与种子点距离在搜索半径内的点与种子点归为一类。
2) 选取类中除种子点外的另一点,重复步骤1)进行搜索归类直至没有新点加入类中。
3) 再随机选取一点作为新的类的种子点,重复步骤1)和步骤2),直至所有点都加入了自己所属于的类中。
2 实验与分析
本文以Microsoft Visual Studio 2017为实验平台,结合PCL库以及libLAS库完成电力线激光点云提取算法设计。实验平台的配置为:DELL工作站,CPU为Intel酷睿i510500,GPU为NVIDIA GeForce GTX 1660 SUPER。为了验证算法的可行性,采用3段不同地形条件下野外架空输电线路机载激光点云数据进行实验测试。线路1为平坦地形条件下点云数据,线路总长度为1.45 km,线路走向为直线型,点云总数量为4 540 016 个,点云平均密度为91 点/m2,共有14 根电力线,2个不同类型的电力杆塔,同档水平电力线水平投影平均距离为0.6 m。线路2为高坡度地形条件下点云数据,线路总长度为3.5 km,线路走向为折线型,点云总数量为7 210 145 个,点云平均密度为64 点/m2,共有14 根电力线,4个不同类型的电力杆塔,同档水平电力线水平投影平均距离为0.5 m。线路3为混合地形条件下点云数据,线路总长度为1.75 km,线路走向为直线型,点云总数量为7 854 169 个,点云平均密度为89 点/m2,共有14 根电力线,3个不同类型的电力杆塔,同档水平电力线水平投影平均距离为0.6 m。
原始点云数据如图3所示。
地面地物点滤除结果如图4所示。
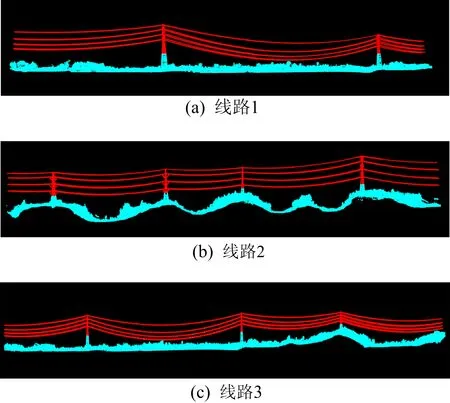
图4 地面地物点滤除结果
图4中:红色为包含电力线点的上半部分点云;青色为应该滤除的地面点、地物点以及靠近地面的部分杆塔点。由图4可知,通过使用改进后的迭代高程阈值法将分档输电线路点云数据进行分块处理,无论在平原地带还是坡度较大的山地区域,都可以实现电力线点云与地面点的分离。
电力杆塔粗提取结果如图5所示。图5中:红色为电力线点云;黄色为粗提取的杆塔点云;青色为已经滤除的地面地物点以及部分杂点。从图5可以看出,通过使用DBSCAN密度聚类的方法基本可以将电力杆塔完整地提取出来,然而会将与电力杆塔相连接的部分电力线点云与绝缘子点云聚类到电力杆塔类中,因此需要采用高程搜索处理将误分的电力线点云从电力杆塔类中提取出来,为下一步电力线精提取做好准备。
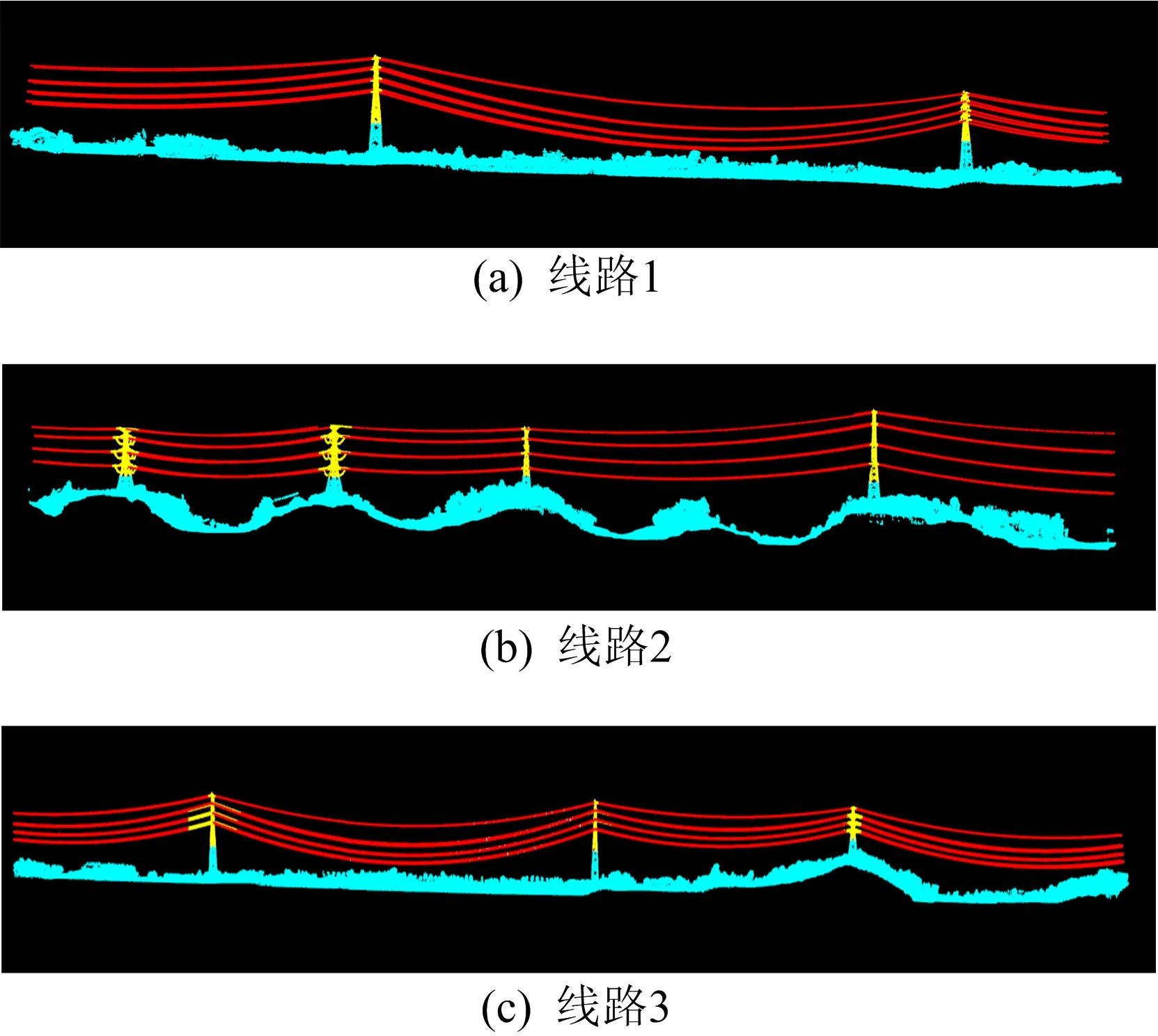
图5 电力杆塔粗提取结果
电力线提取结果如图6所示。

图6 电力线提取结果
图6中:红色为提取出的电力线点;青色为除电力线点以外的点。从图6可以看出,本文的电力线点云提取算法可以准确完整地将电力线点云提取出来,同时提取的电力线基本可以延伸到绝缘子处,满足实际生产中电力线提取要求。
为了进一步验证本文电力线点云提取的准确性,对原始数据中电力线点进行手动提取,同时使用TerraSoild软件处理原始数据提取电力线点,以手动提取结果为基准分析本文方法与软件提取结果的提取率。本文方法提取的电力线基本完整,各股电力线比较清晰,而使用软件提取的电力线有较多缺失,尤其是在绝缘子处以及悬链线最低处漏提取较为严重。3种方法对比分析结果见表1~表3所列。
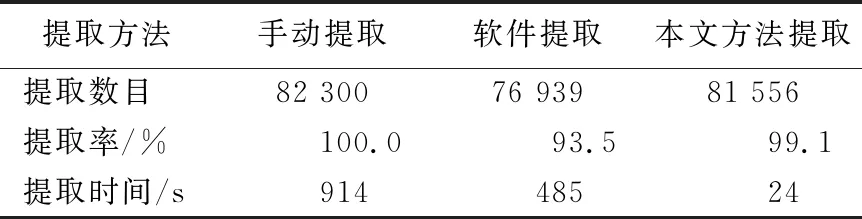
表1 线路1电力线提取对比分析结果
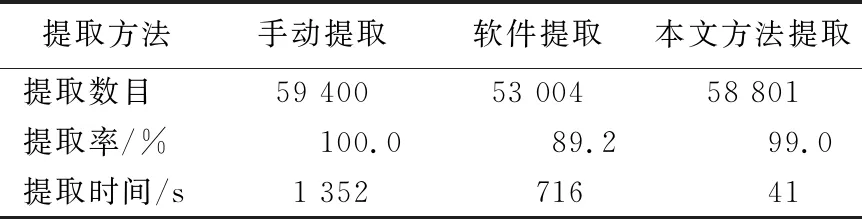
表2 线路2电力线提取对比分析结果
从表1~表3可以看出,软件进行提取电力线的提取率为90%左右,而本文方法提取电力线的提取率为99%以上,高于软件提取效果。对于总点云数量为百万级别的数据进行电力线提取,手动提取一般耗时十几分钟,软件提取和传统提取方法时间一般为分钟级,而本文方法将处理时间控制在秒级。本文方法着重于电力杆塔绝缘子处电力线的精细化提取,粗提取出电力杆塔后结合高程搜索能准确地将电力线与杆塔进行分离,防止造成整根电力线缺失的情况,保证高提取率的同时也大大提高了自动化程度。
3 结 论
本文提出了一种自动化程度高、准确高效的电力线激光点云提取方法。在地面地物点滤除过程中改进了传统的高程阈值法,通过对整体点云进行分块处理后再进行高程阈值的迭代计算,解决了传统高程阈值法在坡度变化较大区域提取效果差的问题,提高了滤波算法在各种不同地形条件下的适用性。在电力线精提取过程中设计了一种新型的针对绝缘子处电力线点云的提取方法,通过高程搜索处理对误分到杆塔类的电力线点进行进一步提取,从而保证了绝缘子处电力线点提取的准确性与完整性,提高了整体电力线提取的精度。实验结果表明,本文的基于机载LiDAR系统的电力线点云提取方法可以应对各种不同地形条件,具有较好的鲁棒性,电力线提取精度较高,满足实际电力巡检生产需求,可以应用于野外架空输电线路的点云数据处理中。
猜你喜欢
卫星应用(2022年1期)2022-03-09
山东农业工程学院学报(2020年12期)2020-03-19
电子制作(2019年11期)2019-07-04
电子制作(2017年14期)2017-12-18
电信科学(2016年11期)2016-11-23
湖州师范学院学报(2016年2期)2016-08-21
电测与仪表(2016年23期)2016-04-12
山西大同大学学报(自然科学版)(2016年6期)2016-01-30
地理与地理信息科学(2015年4期)2015-10-13
电测与仪表(2014年13期)2014-04-04