面向人车冲突的5G 高精度定位智慧灯杆研究
2023-09-21 07:04肖广兵谢彭辉
河北软件职业技术学院学报 2023年3期
肖广兵,谢彭辉
(南京林业大学 汽车与交通工程学院,南京 210037)
0 引言
我国是世界上道路交通事故死亡人数较多的国家之一,调查发现:在死亡事故中,欧美国家大半为车辆乘员,而在我国六成以上的死者为行人、自行车等交通弱势群体。[1]在行人过马路的过程中可能会遇到一些抢绿灯的车辆,这些车辆速度快,遇到突发情况无法及时刹停,这样就会对正常过马路的行人等交通弱势群体带来伤害。
本文研究的智慧灯杆以灯杆为基础通过搭载LED 显示屏、摄像头、传感器等设备实现信息交互。[2]智慧灯杆作为市政设施,因其分布广而密集的特点,可以满足5G 超密集组网的站址需求。[3]利用基于5G 的A-GNSS 系统架构快速获取终端位置信息,其定位精度、接收机灵敏度高。[4]
1 系统设计
本系统以STM32 单片机为核心,通过5GV2P(车辆与行人的交互)通信技术,车辆可以获得一定范围内的行人信息以保证安全驾驶;同时,行人和交通弱势群体等也可以提前一段距离收到超速车辆和失控车辆警告信息,从而更好地保护自身安全。[5]系统设计如图1 所示。
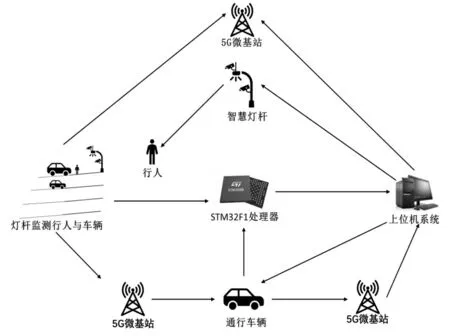
图1 系统设计
5G-V2V(车与车的交互)通信技术与传统的通信技术不同的是车辆与车辆可以直接进行通信而无需基站转发信息,不受固定基站的限制,使通信更加灵活,并能够适应复杂的环境,提供更低的信息传输时延和传输成本。[6]
同时,系统通过摄像头以及传感器传输的数据统筹处理城市全域的人车冲突问题。在接收到由摄像头、传感器反馈的现场信息后,经综合研判,系统向驾驶者、行人发出指令,通过车载LED屏、灯杆上的LED 屏以及语音提示系统来达到提醒驾驶者、行人的目的。[7]在遇到由于驾驶者未听从系统提示进行不当操作而造成事故时,可以及时向交管部门发出信息,从而提醒交管部门进行现场监控查看以及派遣警员前往事故发生地。[8]
2 硬件电路设计
城市智慧灯杆系统的硬件部分主要由供电模块、单片机处理器模块、5G 通信模块、Wi-Fi模块、语音提示模块构成。以处理器为核心,其他模块通过串口连接。[9]如图2 所示,硬件设备以STM32F103CBT6 主处理器模块为核心[10],供电模块辅助其他模块,通过串口或USB 转RS485 与处理器连接。
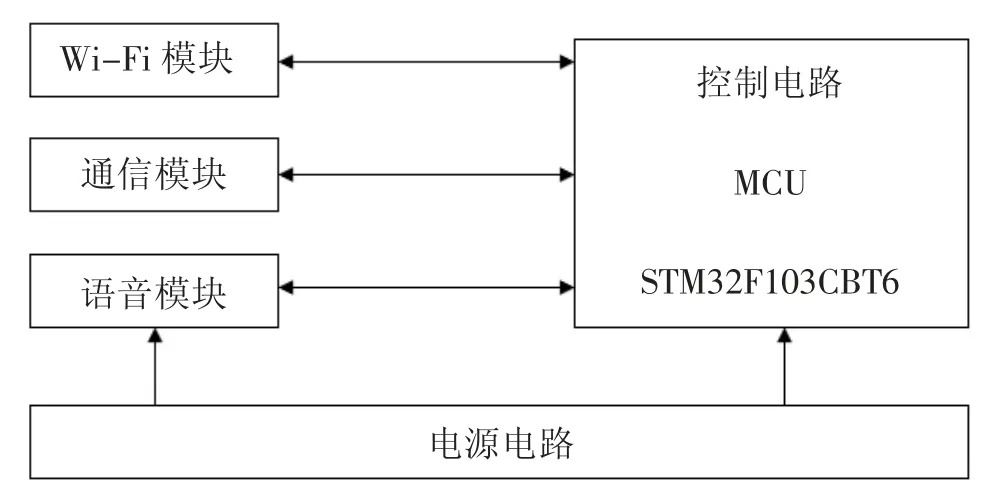
图2 硬件设计框图
2.1 供电模块
本系统中STM32 处理器工作电压为2.0V~3.6V,通信模块SIM8200EA-M2 需3.3V~4.3V 直流电压,为使模块各个部分正常工作,必须对两者进行分别供电,电路设计如图3 所示。使用DCDC 变换芯片MC34063 和LM2940 稳压器构建供电模块。[11]LM2940 是一个低漏失三端线性稳压器,其输入电压最高可达12V,输出电压可以为1.8V、1.9V、2.5V、3.3V 和5V,输出电流最高可达1A,片内集成了过热保护、过流保护模块,从而保证了芯片和系统的安全。[12]
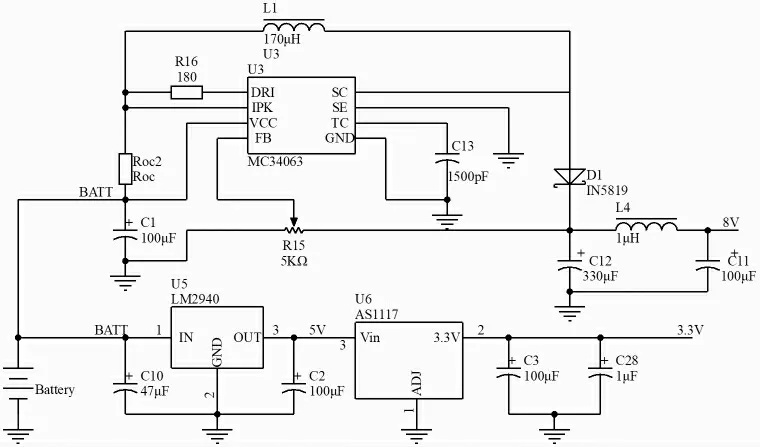
图3 供电模块电路
2.2 处理器模块
处理器模块采用意法半导体的基于ARM Cortex-M3 内核的STM32F103CBT6 芯片,该芯片具有体积小、开发使用方式简单、低功耗的优点。[13]该芯片提供了64 个I/O 接口,支持IIS、JTAG/SW、FSMC、PWN 等外围设备,满足本系统的设计要求,处理器模块电路(如图4 所示)使用8M 外部晶振,使用原生串口或USB 转RS485 实现串口通信。该处理器性能优越,在各个领域被广泛应用。
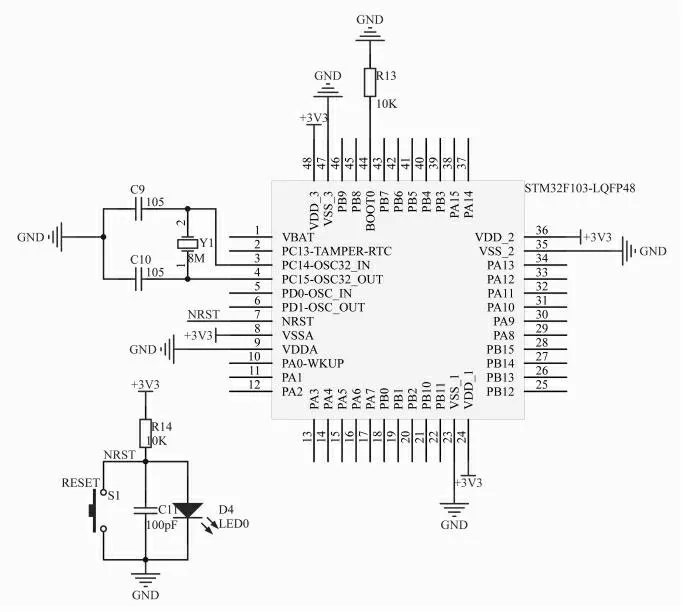
图4 处理器模块
2.3 5G 通信模块
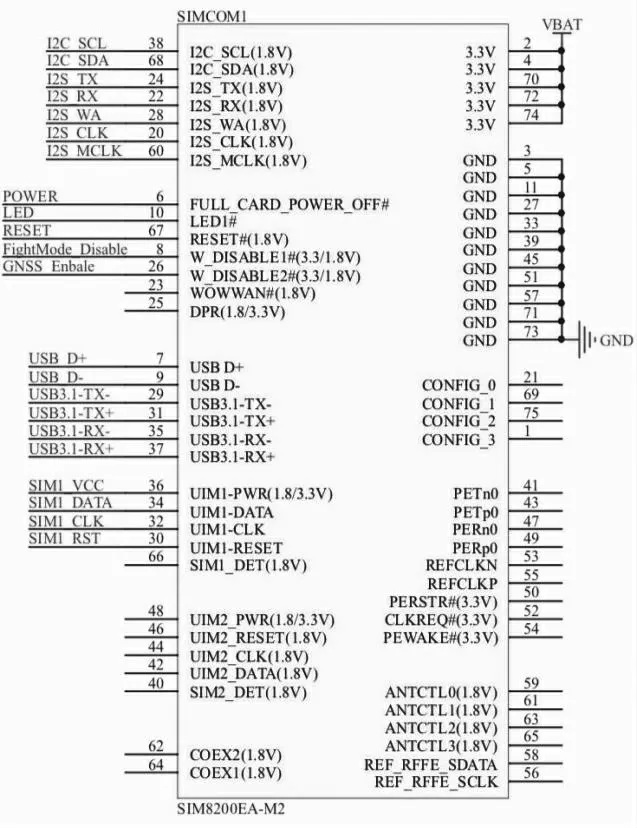
图5 无线通信模块
2.4 Wi-Fi 模块
Wi-Fi 模块电路如图6 所示,车-车、灯杆-车之间的通信采用ESP8266 无线通讯模块,该模块具有超低功耗、工作范围大、稳定性高且能适应各种操作环境的优点。同时,ESP8266 内置Tensilica处理器,可将高达80%的处理能力留给应用编程和开发[14],适合运用在V2X 通信中,实现车与车、车与路基单元间信息的传递共享。当驾驶者通过路口时如有行人或非机动车高速靠近,智慧灯杆会将信息发送给车辆来提醒驾驶者。
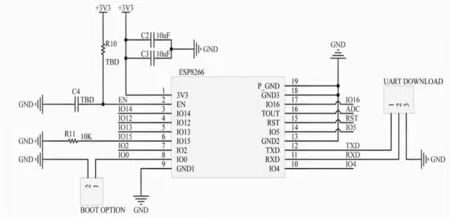
图6 Wi-Fi 模块电路图
2.5 语音提示模块
系统的语音提示模块采用LD3320 芯片。该芯片工作电压为3.3V,芯片功耗低,且不需要外界任何辅助芯片如Flash、Ram 等,具有高效性。该模块电路设计如图7 所示。
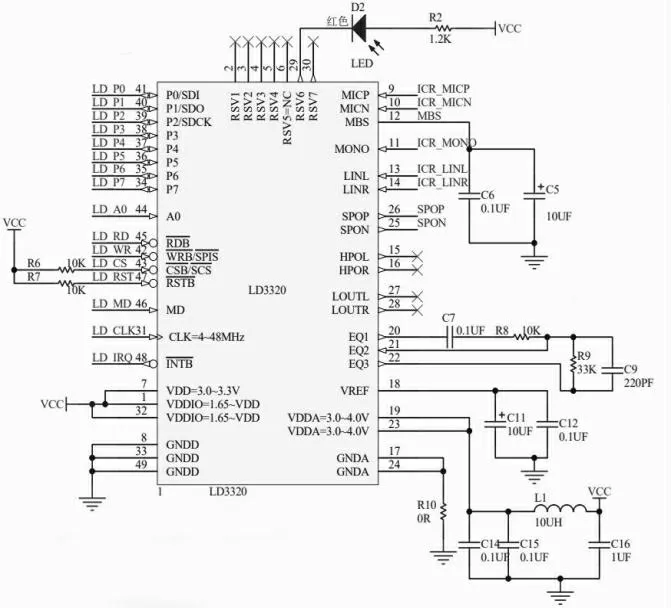
图7 语音提示模块
3 软件及算法设计
智慧灯杆交通系统软件部分选用Visual Basic 6.0 搭建。[15]系统的登录界面如图8 所示。根据账号,系统会自动辨认出管理员、普通用户。通过综合使用本软件,管理员可在上位机系统实现对人车冲突的预判、对驾驶员与行人的提醒以及对灯杆进行一定的维护;普通用户可以实现车辆提前感知与行人冲突的预警提示。
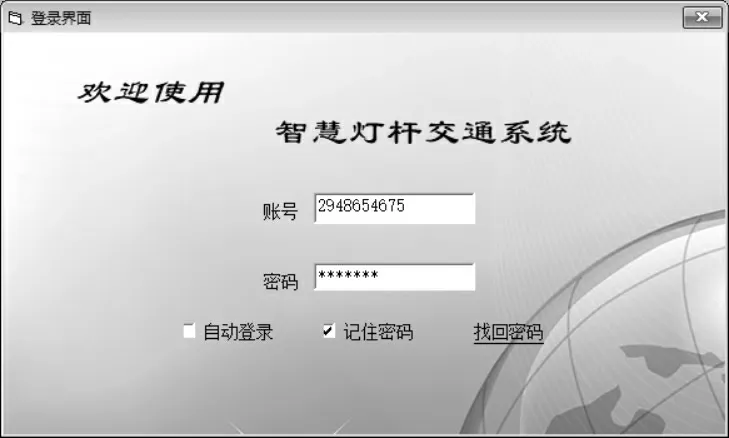
图8 登录界面
软件部分的功能流程如图9 所示。软件的核心功能分别是面向管理者的设备维护和抓拍查询,以及面向驾驶者的辅助驾驶功能。设备维护功能由派遣维护、灯杆总览、调试设备三方面构成,可实现对灯杆维修进度的实时掌控;抓拍查询功能可查看违章历史记录并作出处理;辅助驾驶功能可以实时显示车辆所经过路口的交通情况,驾驶者可以根据车内实时画面以及车载语音提示来控制车辆,避免发生人车冲突。[16]
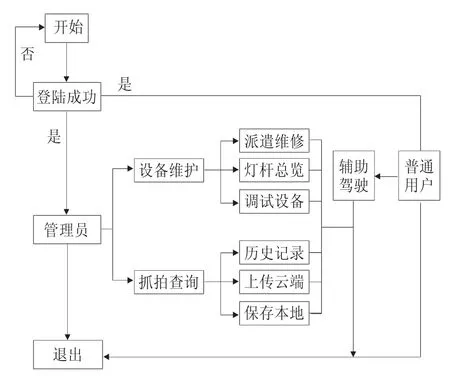
图9 系统功能流程图
具体算法如下:当车辆在公路上行驶时,通过读取ECU 数据,将车辆行驶的加速度(假设车辆做匀加速运动)、实时速度以及位置发送至上位机,再综合利用电子地图、红绿灯信息以及灯杆摄像头、传感器发送回上位机的行人行走速度、加速度以及行人位置。
车辆在平直道路行驶,在路口遇到红绿灯由绿灯跳至黄灯,根据此时车辆速度v1、路口的最大限制速度vm、车辆此时的位置到通过路口所需要通过的路程s和车辆的最大加速度a0,计算通过路口需要的时间t,并与绿灯开始跳至黄灯到转为红灯的时间t0相比。
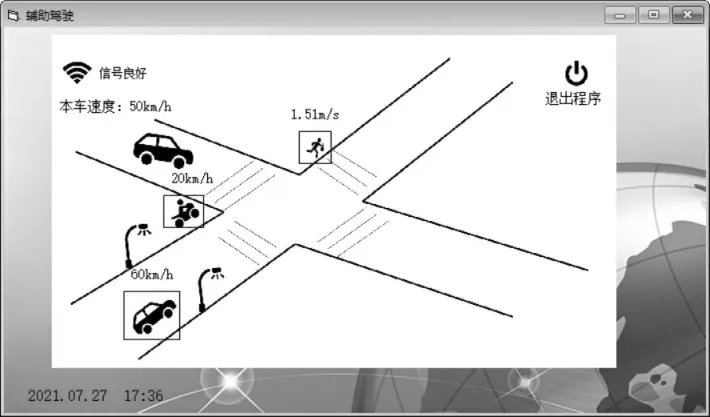
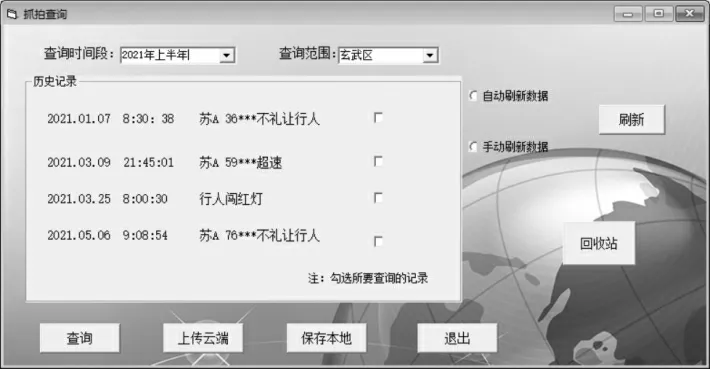
当v1 若t 为了获得羊肚菌SDF的最佳提取工艺,在单因素试验的基础上,以料液比(X1)、碱液浓度(X2)、提取温度(X3)、提取时间(X4)4个因素为自变量,以羊肚菌SDF得率为响应值,采用响应面法四因素三水平的实验设计,实验结果见表2。利用Design-Expert 8.0.6 软件中的Box-Behnken模型,建立回归方程,对表2中数据进行回归分析,回归分析结果见表3。 当v1>vm时,汽车需要减速至vm通过路口,在何时减速可以花费最少的时间通过路口可以通过以下方程解得(s2为汽车从初始位置行驶至测速摄像头处的距离): 同理,比较t与t0大小做出合理判断。 行人或非机动车在通过路口时,通过摄像头测量其速度[17],当速度较快,有加速通过路口的趋势时,系统会向驾驶者提前发送信号,并通过灯杆LED 屏以及语音提示系统对行人进行提示。 设备维护管理界面如图10 所示,可在该界面检索城市范围内需维护的灯杆数及其所在的位置,损坏灯杆的具体位置会在电子地图上显示[18],通过点击地图上标签点即可在右侧显示该点维修详情,包括损坏对象、派遣人员和预计维护所需时间等。 图10 设备维护管理界面 辅助驾驶界面如图11 所示。通过分析从灯杆所在处传输回来的数据,利用算法对建立的模型进行求解,如可以通过路口则提示可以通过,如不可以通过则提示不可通过。利用摄像头对行人过街特性进行研究,如若行人速度异常并判断有过街的趋势,则可以通过灯杆上的语音提示系统提示行人,并通过车载语音提示驾驶者注意周围驾驶环境。 图11 辅助驾驶界面 抓拍查询界面如图12 所示。管理员可在该界面查看相应时间段和指定区域路段的机动车违章行为、行人过马路闯红灯的历史记录,还可以勾选相应记录进行详细的信息查询,系统会自动对照片进行识别并导出相关的驾驶人和行人的身份信息。[19]对于已经完成罚款处罚的记录会自动删除,如有需要可以在回收站内查找。 图12 抓拍查询界面 本文设计的智慧灯杆交通控制系统以STM32F103CBT6 处理器为核心,通过摄像头、传感器等硬件采集信息,借助通信模块、Wi-Fi 模块传输信息,将信息传输给上位机管理系统,系统通过算法协助交通管理者、驾驶员了解交叉路口行人以及非机动车辆动态,以及交通事故责任的认定。本系统不仅可以提醒驾驶者安全驾驶,还可以集中维护管理城市道路的灯杆。本系统软硬件结合,可较好地服务于管理者与驾驶者,实践运用前景广阔。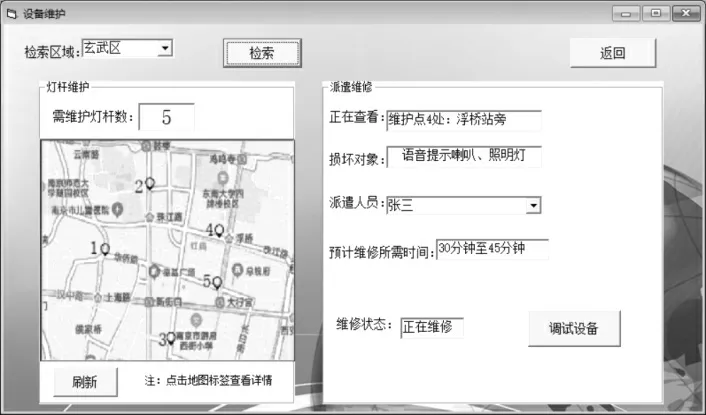
4 结语
猜你喜欢
照明工程学报(2021年2期)2021-05-10
意林(2021年5期)2021-04-18
光源与照明(2019年4期)2019-05-20
扬子江(2019年1期)2019-03-08
电子测试(2017年11期)2017-12-15
科学家(2017年20期)2017-11-10
小天使·一年级语数英综合(2017年6期)2017-06-07
海外星云(2016年15期)2016-08-04
汽车之友(2015年9期)2015-05-06
科学24小时(2014年2期)2014-09-10