一种家用助餐服务机器人结构设计与有限元分析
2023-11-24 06:19张晓莹李俊颖
装备制造技术 2023年9期
张晓莹,李俊颖
(1.郑州科技学院机械工程学院,河南 郑州 450064;2 河南水利与环境职业学院,河南 郑州 450008)
0 引言
在科技快速进步与创新的21 世纪,越来越多的工业制造设备走向智能化、人性化、便捷化。在这个背景下,有诸多如:智能代步椅、残疾人升降机、残疾人洗漱设备等生活辅助设备被发明与设计出来,在衣食住行上给他们的生活创造了生活便捷条件。为帮助残障人士和老年人解决用餐困难的问题,设计一种家用助餐服务机器人。
1 国内外发展现状
英国人Mike Topping 研制的Handyl 机器人,最主要的功能是为使用者喂食,采用5 自由度的机械臂和3 种可拆卸的托盘来满足不同的使用需求。它是目前世界上最成功的一种低价的康复机器人,使一个11 岁患有脑瘫的男孩能够独立就餐[1]。在东京举行的第28 届国际福利设备展H.C.R2001 上,日本SECOM公司展示了帮助手脚不方便者就餐的6 轴机器人“MY SPOON”。该机器人具备夹住饭菜并且送到残障人士嘴边的功能[2]。澳大利亚推出了一款喂饭服务机器人,人们将它系在腰上,机械手可以上下移动,用餐时人们稍微挪动头部实现进食[3]。
海军工程大学研发的服务老年机器人,它的外观比较小巧美观,没有大的的突起;采用一个驱动电机,通过连杆机构来驱动整个机械臂,结构简单、轻便。餐桌设计比较有新意,餐盘和圆桌可以同时旋转,从而弥补手臂结构设计的缺陷。但是机械手的自由度不足,不能算作一个多关节的机械臂,活动空间受限[4]。哈尔滨工程大学研发的MY TABLE 系列助餐机器人通过脚踏实现对餐盘中的食物进行选餐和进食。
2 机器人总体方案设计
2.1 助餐机器人设计要求
助餐服务机器人设计的目的就是帮助残障人士和老年人解决日常吃饭不便的困难。通过机械臂来部分完成或者全部的实现吃饭吃菜的动作功能。这种机器人需要轻便、可移动、体积小,并且由于与人类直接亲密接触,故需要安全性与控制性极高。
机械臂放在餐桌上,饭和菜以及汤盛在机械臂的底座储物盘上,这个储物盘可以进行简单移动,方便更快进行喂饭。机械臂拥有足够的自由度以及合适的臂长,能将饭盘上的物品盛起,并且顺利将食物放置适当的位置,等待被服务人员食取。要求机械臂重量轻,体积小,安全性好,具备稳定记忆功能,对机械臂提出如下机械设计:
(1)作业臂最大重量不超过5 kg;
(2)能够取食最大负载为600 g;
(3)臂长最大伸长45 cm。
2.2 自由度分配和结构构型
助餐机器人完成喂饭的动作,需要到达有效工作空间,这个范围可以通过具有三个自由度的臂身来实现,确定末端执行器勺子在空间中所处的位置,实现水平、上下移动的要求。另外,通过三个自由度的腕部结构来确定勺子在空间的姿态,实现的姿态为水平还是竖直或倾斜具体角度。
总体机械传动方式确定下来后,对机械臂的具体结构进行设计,需要根据实际的机械臂应用场合分析其基本的功率、受力、扭矩等性质,从而确定下来具体的机械结构尺寸与材料选型以及最终的机械运动及其控制方向,最终得出了如下的设计方案,如图1 所示。
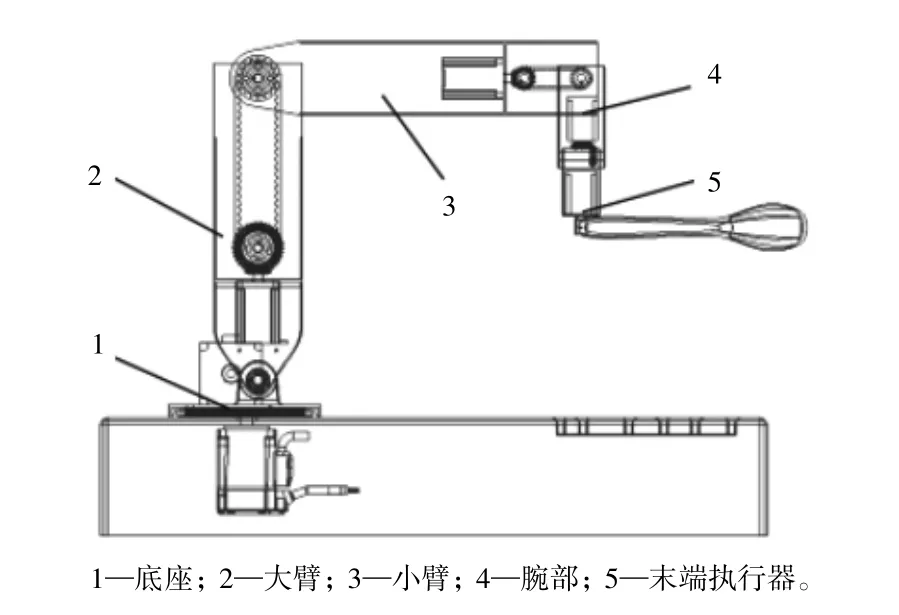
图1 机器人总体方案
助餐机器人由底座、大臂、小臂、腕部、末端执行器组成,通过底座回转、大臂俯仰、小臂俯仰、小臂回转、腕部俯仰及腕部回转实现喂餐动作,共有6 个自由度,工作空间比较大。
3 机器人机械结构设计
3.1 机械臂及底座结构
3.1.1 餐盘底座设计
餐盘的尺寸为254 mm × 454 mm × 80 mm,采用内部掏空的设计,减轻重量。较大的面积可以很好的支撑上部的机械臂,承受机械臂旋转带来的扭矩,保证机械装置的稳定性;同时面积较大,可以装下足够的饭与菜。餐盘棱角采用圆角设计,可以增加美感与触感,不会割手。整个餐盘底座为不锈钢材质,采用冲压的工艺制作而成。整个冲压的工艺为:设计样式图纸-不锈钢下料-抛光-清洗-干燥-置于模具上-落模成型-脱包装-入库,由于本篇文章侧重于机械臂结构设计,故对此处的冲压工艺不再详细分析。
3.1.2 机械臂旋转底座设计——第一轴
机械臂旋转底座采用的是内啮合直齿轮设计,由于空间有限,以及机械大臂的尺寸大的机构特征,为了充分利用空间,故选择内啮合机械齿轮结构,此类结构传动稳定,精度高,便于动力元件-伺服电机的控制。具体结构如图2 所示。
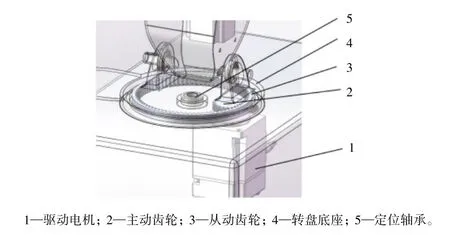
图2 机械臂旋转底座传动设计图
机械传动结构:驱动电机转动一定角度,由主动齿轮与从动齿轮内啮合,从动齿轮为一个内齿圈,其余转盘底座通过螺纹顶丝安装固定,当从动轮被带动时,转盘底座同样进行转动,进而使得整个机械臂上部分和末端执行部分都进行转动,从而可以控制末端执行部位的停留位置。
3.1.3 机械臂大臂关节设计——第二轴
机械臂的大臂起到支撑整个机械臂的作用,对其臂身的刚度有着较为重要的要求,同时其关节处的受力情况又是整个机械臂受力最大处,故在设计的时候,对其参数性能要求很高。本设计方案采用的是利用外啮合斜齿轮进行传动,具有一定的减速比。具体结构如图3 所示。
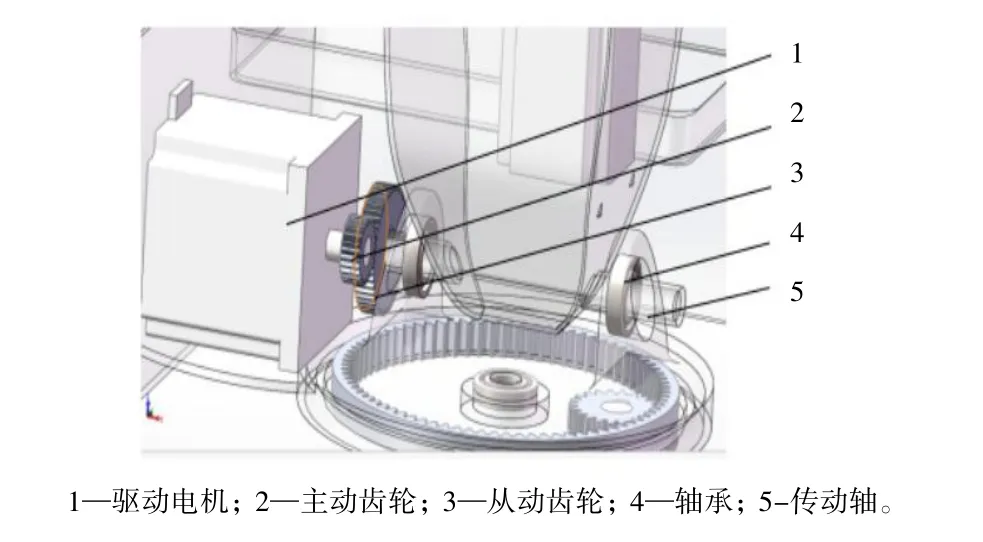
图3 机械臂大臂关节传动设计图
3.1.4 机械臂小关节传动设计——第三轴
机械臂的大臂与小臂的联合运动,基本上控制了整个机械手的工作范围,由于空间的限制,机械臂小臂的传动采用同步带的控制方式进行传动。由于传动的动力件电机轴与被输出的7 轴在空间上承90°角,故采用锥齿轮进行传动来改变传动方向,如图4 所示。
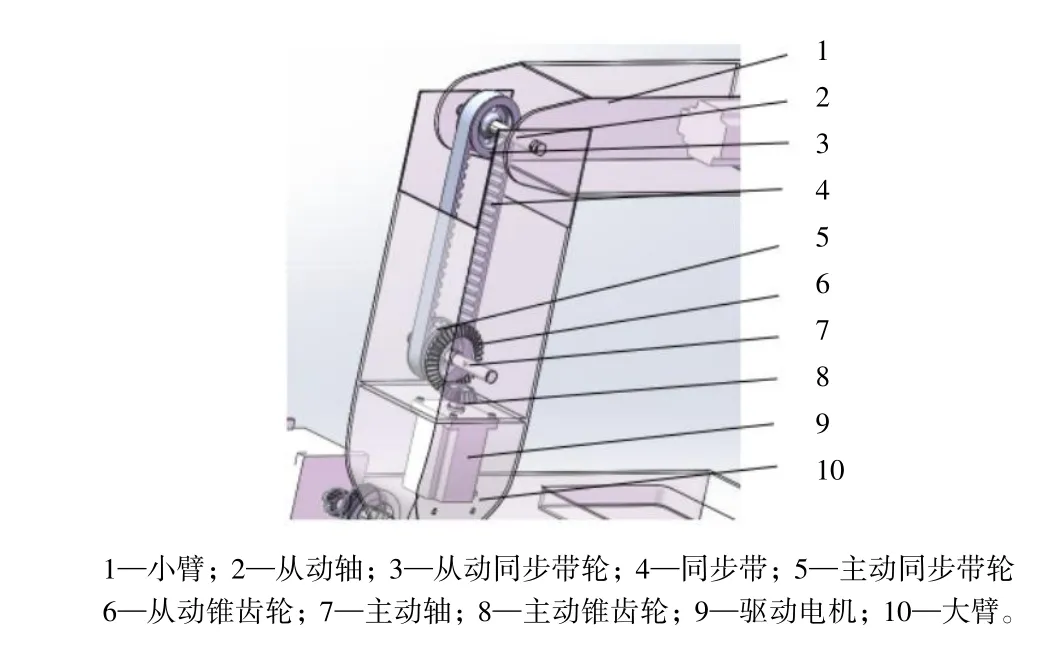
图4 机械臂小臂关节传动设计图
3.2 手腕关节设计
3.2.1 大手腕关节设计——第四轴
第四轴是对第三轴在竖直方向上的方位补充修正,使其运动的结构更加灵活。第四轴与第三轴的结构类似,如图5 所示。都是先通过锥齿轮传动,将电机的传动方向转成90°的方向,再通过同步带传动,使得驱动电机可以控制从动轴旋转指定的角度,而从动轴又与手腕机架成锁定状态,意味着手腕机架旋转的角度跟从动轴的角度一样,从而达到控制手腕旋转的目的。

图5 机械臂大手腕关节传动设计图
3.2.2 小手腕关节设计——第五轴
小手腕关节传动主要就是采用锥齿轮进行传动控制,将驱动电机轴的方向更改90°,当驱动电机转动,通过锥齿轮传动,使得小手腕部分进行围绕旋转轴旋转,产生手腕平面上的转动,调整位置,当对人进行喂饭的时候,可以方便的调整位置,如图6 所示。

图6 机械臂小手腕关节传动设计图
3.2.3 末端执行机构设计——第六轴
该轴位于整个机械臂的最末端,为最后的执行机构,负责旋转运动,对汤勺进行旋转,完成盛饭盛菜的功用。汤勺由驱动电机直接驱动,对其角度进行控制,通过减速电机的直接驱动,控制更加便捷,如图7 所示。
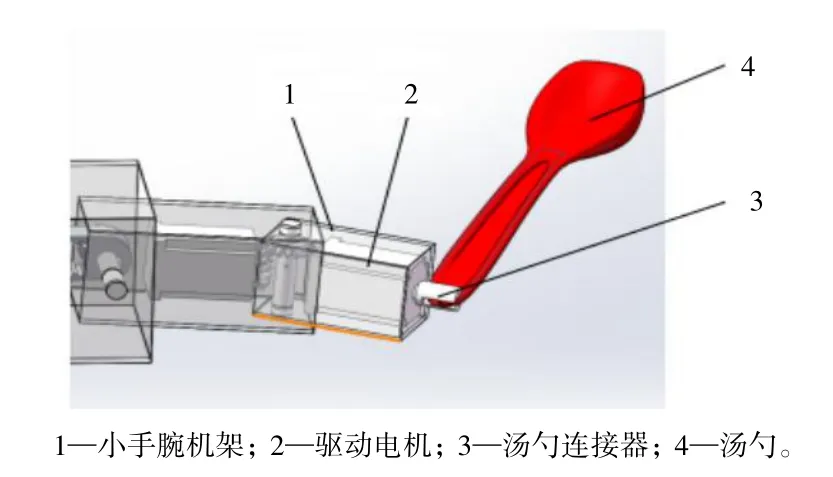
图7 机械臂末端执行机构传动设计图
4 大臂关节轴的有限元分析
通过有限元对大臂关节轴进行分析,最小安全系数分布情况如图8 所示,最小安全系数为4.5,大于1.3,设计符合要求[5]。
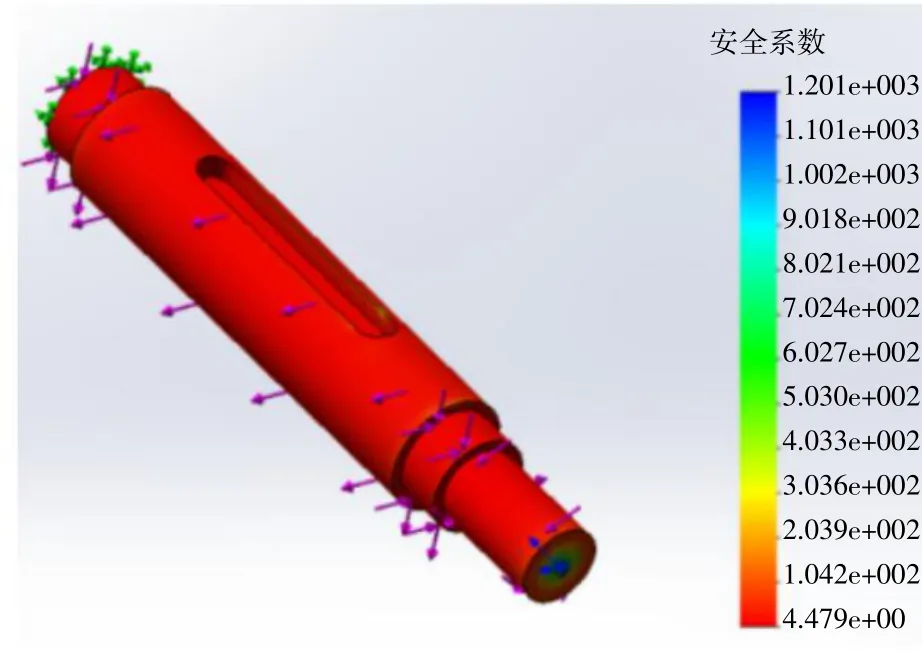
图8 最小安全系数分布情况
5 机器人喂餐功能仿真分析
利用SolidWorks 自带的插件Motion 进行简单的运动学仿真,完成取餐喂餐的动作,仿真结果如图9所示。
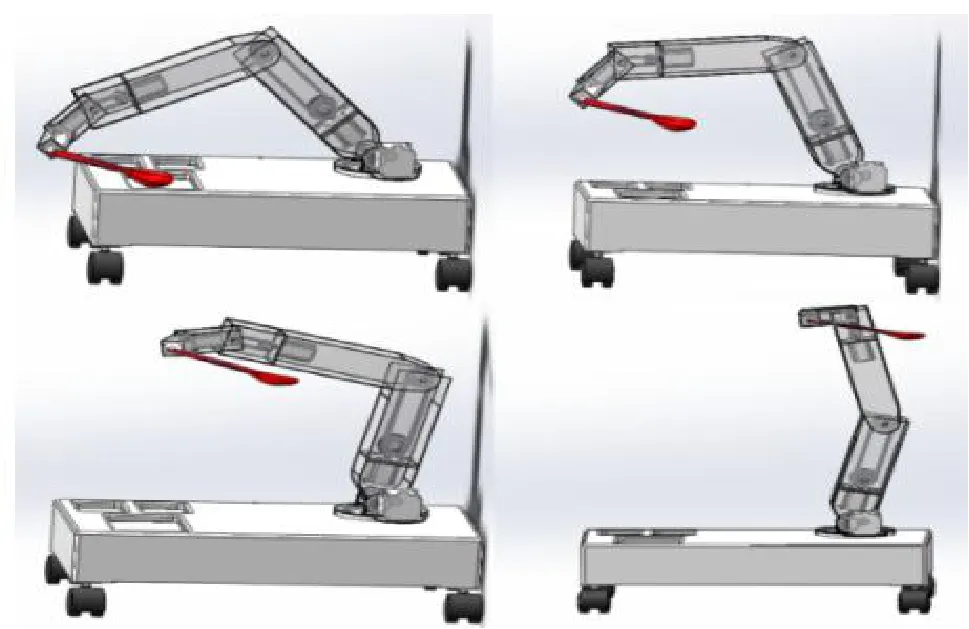
图9 喂餐功能仿真分析
用于助残助老的服务老年机器人具有质量轻,体积小,操作空间大的特点[6],在为人服务特别是助老助残方面有良好的应用前景,因此该服务老年助餐机器人的设计具有重要的研究意义和实际价值。本文对助餐机器人进行了详细的结构设计,对关键零件进行了有限元分析,并进行了喂餐功能仿真,设计可靠便捷。
猜你喜欢
黑龙江科学(2023年13期)2023-08-18
中国民政(2023年2期)2023-04-05
杭州(2022年1期)2022-02-12
环境技术(2021年4期)2021-09-11
钟表(2020年5期)2020-11-06
海峡姐妹(2019年10期)2019-11-23
小主人报(2018年21期)2018-11-07
载人航天(2016年4期)2016-12-01
快乐语文(2016年10期)2016-11-07
综合智慧能源(2014年1期)2014-09-10