基于自然驾驶数据的全速自适应巡航系统综合评价方法研究
2023-11-24 06:19石胜文杨磊光申富强
装备制造技术 2023年9期
石胜文,杨磊光,申富强
(1.东风柳州汽车有限公司试验中心,广西 柳州 545007;2. 桂林电子科技大学机电工程学院,广西 桂林 541004)
0 引言
随着经济的发展,我国汽车保有量逐年增加,现有的道路容量不完全满足汽车保有量日益增长的道路使用需求,并且由于驾驶员误操作、驾驶注意力不集中等造成的交通安全问题日益凸显[1]。汽车主动安全技术可以协助驾驶员提高行车安全性和驾驶舒适性,被认为是提升出行效率、解决事故频发问题的有效措施[2]。全速自适应巡航系统是汽车主动安全技术中的一种,能够通过雷达和相机等真值传感器自动调节车速,保持安全距离,并且可以在道路条件变化时自动适应,被广泛应用于现代汽车中。目前针对于全速自适应巡航系统的测试与评价方法主要有:国际标准ISO15622-2018、ISO22178-2009、ISO22179-2009;国家标准GB/T 20608-2006;企业规程:《全速自适应巡航控制系统评价规程》[3],ISO15622-2018、ISO 22178-2009、ISO22179-2009 三项标准分别是针对综合路况、市区拥堵低速及高速公路三种场景及测试要求[4]。但是这些法规发布时间较早,评测内容已无法跟上技术发展的进度,部分法规存在落后技术的现状[5],本文针对现有测试方法与评价体系,提出基于自然驾驶数据的FSRA 系统综合评价方法,旨在完善FSRA系统功能开发测试评价体系,加快智能驾驶辅助系统的应用与推广,同时对智能汽车其他功能模块开发与测试评价具有参考意义。
1 自然驾驶数据采集
1.1 采集设备
i-TESTER 测试系统是可用于FSRA、LKA、BSD、AEB 等ADAS 系统以及自动驾驶的实车道路测试系统。该设备包括雷达、mobileye 摄像头等真值传感器、i-TESTER 主机、可外拓采集模块、6 路高清摄像头及支架、通信总线、平板电脑等。
i-TESTER 测试系统功能原理如图1 所示,包括信息来源、信息采集、数据记录、数据处理及分析报告。
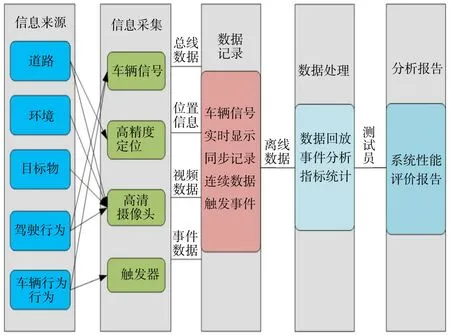
图1 i-TESTER 测试系统功能原理
1.2 试验人员及试验路线
自然驾驶数据采集的试验人员共有6 人,是专业从事道路测试与评价的技能人员,拥有良好的驾驶素质与丰富评车经验。所采集的自然驾驶数据包括:自车运动状态、目标物运动状态、目标车类型、车道线形、天气、交通灯、路口形状、道路等级、时间段、交通流等多种要素,是一个庞大的复杂数据集。试验总里程共5 万公里,包含我国各种道路类型,涵盖了高速公路、国道、省道、城市道路与乡村道路。
采集数据地区涉及绝大部分省份,采集的数据涵盖路线广泛,试验数据能可靠地反应中国绝大部分驾驶员在各地区各地型日常行驶过程中的真实驾驶情况。同时为了最大程度接近人们日常行驶中各里程占比,设计了如表1 所示的各类道路试验里程占比。

表1 各类型道路试验里程占比
1.3 数据预处理
数据预处理是数据提取与分析的前提[6]。在自然驾驶数据采集过程由于极端环境的存在,驾驶员风格异同以及设备高频采集与偶发因素,原始的自然驾驶数据并不能直接用于数据的提取和分析,因此需要对采集后的自然驾驶数据进行预处理得到符合条件的数据集。本文通过五次多项式平滑对车速和加速度进行处理。处理结果如图2、3 所示。

图2 加速度平滑前后对比
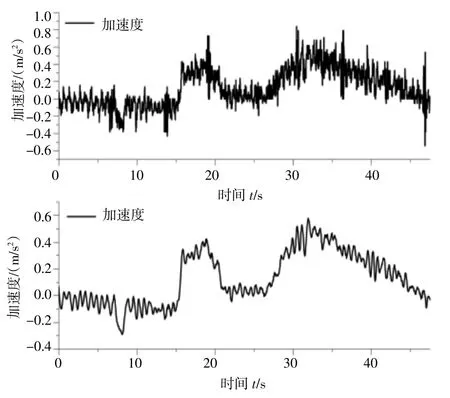
图3 速度平滑前后对比
2 问题点数据流截取与导出
2.1 问题点统计
自然驾驶数据采集过程中FSRA 发生的问题包括目标误识别、目标识别不稳定、误退出、无法激活、误减速等五类。根据i-TESTER 软件信息统计功能,对离线数据进行统计,记录问题点的次数。为了更好反应FSRA 系统的适应性能力,从天气、道路、光照三个不同方面进行问题次数占比统计,其统计结果如图4-图6 所示。

图4 不同天气问题次数占比
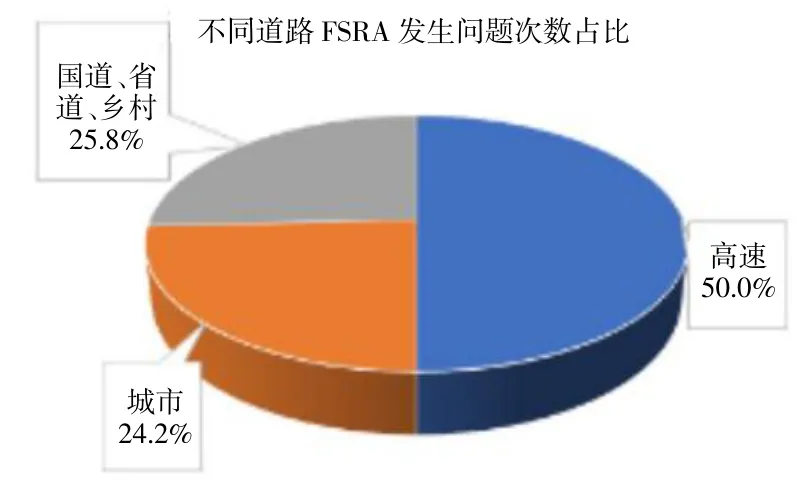
图5 不同道路问题次数占比
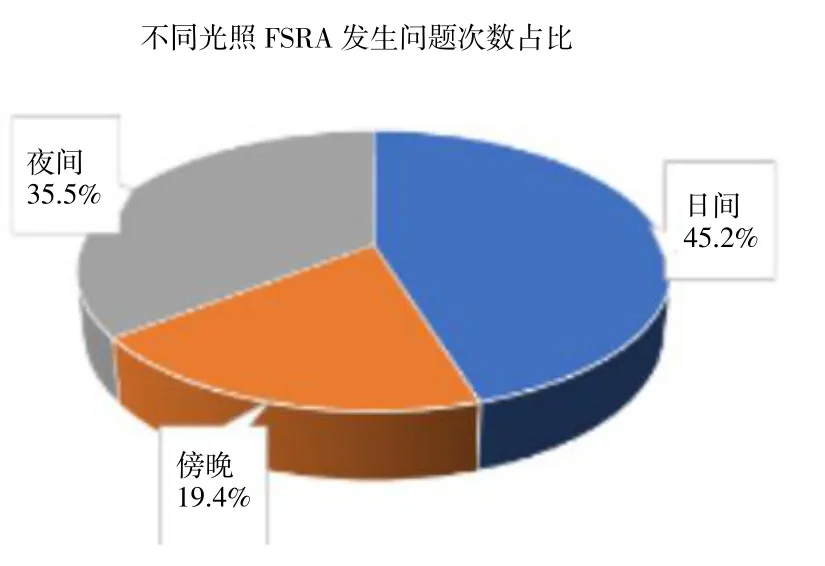
图6 不同光照问题次数占比
2.2 数据流截取及数据导出
利用i-TESTER 软件对离线数据进行处理,根据道路测试人员记录问题的时间节点,截取包含问题点的数据片段并在软件系统中进行回放与解析。在曲线回放栏中配置FSRA 的特征指标,确定对应的DBC文件,设置好截取时长,然后导出数据。
3 客观指标分析与主观评价
3.1 问题点特征指标分析
加速度、速度是FSRA 系统问题点最为明显的特征指标。本文以高速工况主车左右车道有车辆,前方无目标车辆FSRA 误减速为例,来对其特征指标进行分析。FSRA 功能失效速度-加速度如图7 所示。

图7 FRSA 功能失效速度-加速度对开图
由图可知,主车在维持116 km/h 速度巡航过程中,突然发生误减速,其最大减速度为-0.58 m/s2,随后并快速加速恢复巡航车速并稳定行驶。两次误减速的减速度都比较大,速度下降比较急,侧面反应出FSRA 系统的系统的快速响应是以牺牲一定程度的舒适性为前提。
3.2 试验人员主观评价
主观评价是指在针对某项领域进行评价的过程中,通过人体的直接感官来获取评价的参照信息,再由大脑对客体进行相关判断。在整车性能开发中,主观评价主要是指专业的试验人员在评价的过程中,依据个人的感觉对车辆的各类性能进行评价,再将多名试验人员的评价综合分析后得出评价的量化得分和相应的评价。以10 分为满分制,让六名专业试验人员对各项指标进行打分,分数统计结果见表2。
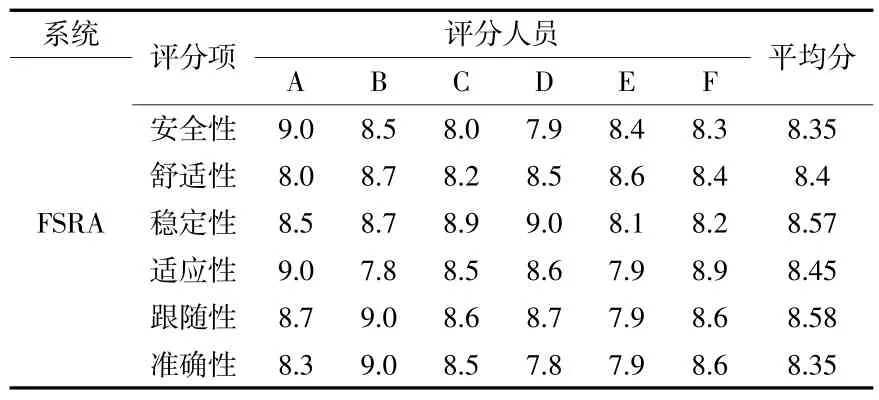
表2 试验人员主观评分
为了使评分结果更加直观可视化,建立安全性、舒适性、稳定性、适应性、跟随性、准确性六维度评分雷达图,如图8 所示。
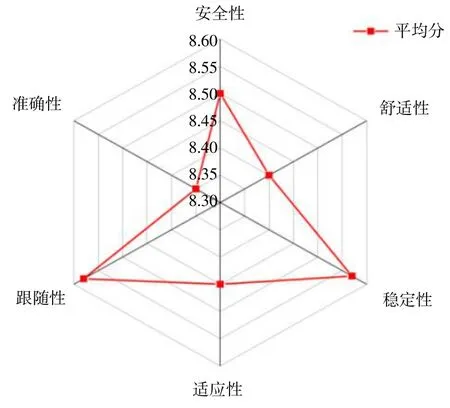
图8 六维度评分雷达图
4 综合评价方法研究
系统综合评价是根据预定的系统目标,采取系统分析的方法,对新开发的或者改建的系统的各种设计方案,从所涉及和影响的各方面进行评审和比较[7],常见的系统评价方法可分为定性的评价和定量的评价,包括专家调查法、多元统计评价方法、综合评价方法等[8]。综合评估方法是一种运用多个指标去评估多个参数的方法,基本思想是将多个指标转化为一个能反映综合情况的指标,主要包括层次分析法、人工神经网络和模糊综合法。
挂袋后催芽管理应坚持保湿为主、通风为辅,空气相对湿度85%以上,即袋表面有露水但不滴落为宜。保湿方法可将地面浇透水,每天喷几次雾状水,喷水量不宜过大,防止刺孔处进水感染杂菌和青苔。每天早、晚各通风1小时,根据气温变化在大棚上适当增减覆盖物,防止冻害发生,管理得当7~10天天即可出齐耳芽。当棚内温度超过25℃以上时,应采取通风或遮荫等方式降温。
4.1 层次分析法
层次分析法是通过两两因素的对比,逐层比较多种关联因素[8],最后确定各个因素整体关系的一种能够解决多目标复杂问题的定性与定量相结合的方法。
该方法将定量分析与定性分析结合起来,用决策者的经验判断各衡量目标能否实现的标准之间的相对重要程度,并合理地给出每个决策方案的每个标准的权数,利用权数求出各方案的优劣次序,比较有效地应用于那些难以用定量方法解决的课题。层次分析法主要有4 个步骤:(1)建立层次结构;(2)构造判断矩阵;(3)计算权重系数;(4)一致性检验。
4.2 模糊综合评价法
模糊综合评价法是一种基于模糊数学的综合评价方法。模糊评价法可以根据模糊数学的隶属度理论将定性评价转为定量评价,在处理定性的、不确定及信息不完善的问题上有较大的优越性[9]。模糊综合评价方法分为6 个步骤:(1)建立模糊综合评价集;(2)建立综合评价评语集;(3)获得评价矩阵;(4)确定因素权向量;(5)建立综合评价模型;(6)确定系统总得分。
4.3 基于层次分析模糊法综合评价法的FSRA 系统综合评价
本文是以层次分析法确认权重值求出一个评价函数,来建立FSRA 系统与影响因素的数学模型。
基于层次分析模糊法综合评价法的FSRA 系统综合评价步骤如下:
(1)构建FSRA 的层次结构模型。
从安全性、舒适性、稳定性、适应性、跟随性、准确性六个维度来建立层次结构模型,如图9 所示。
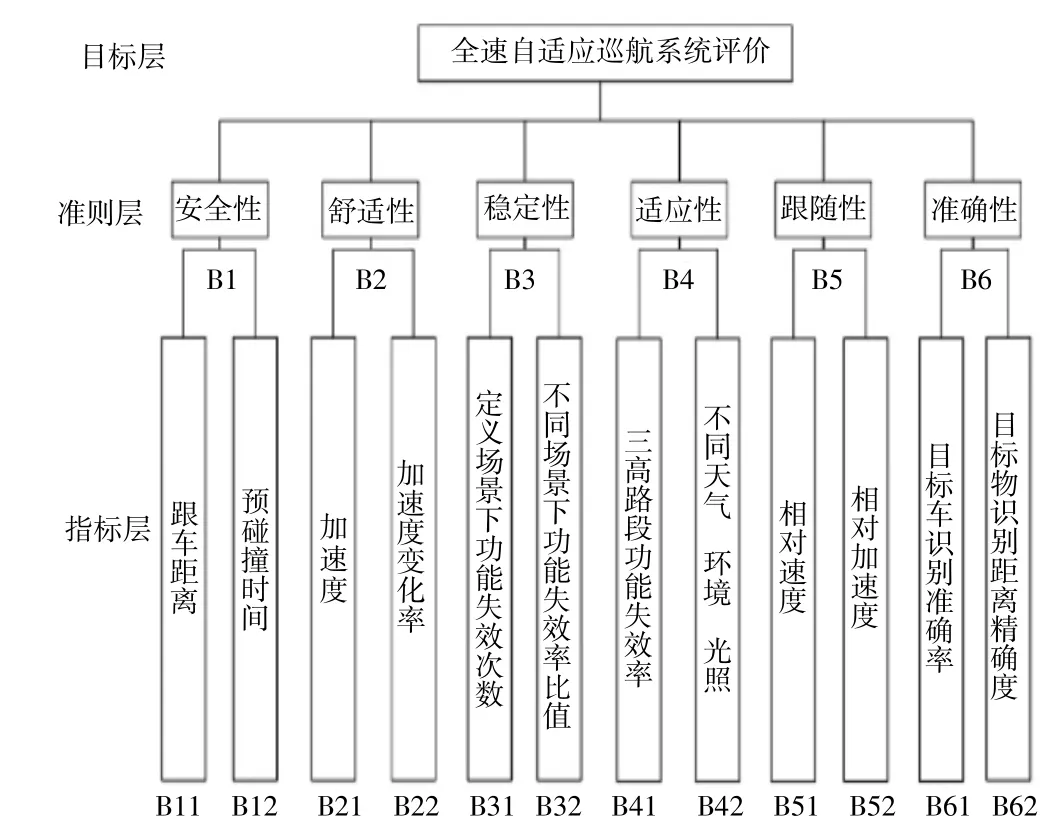
图9 层次分析法层次结构
(2)根据标度表3 来确定两两因素的相对重要性。
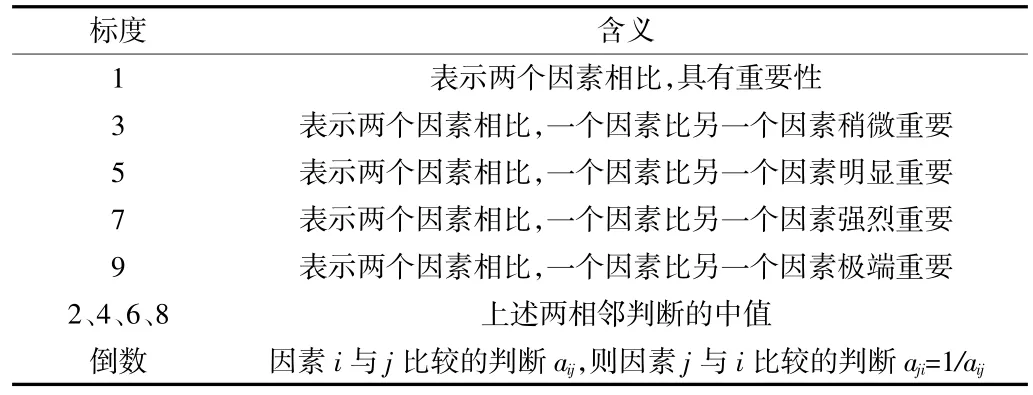
表3 层次分析法标度表
(3)由相对重要性来确定一级指标判断矩阵,判断矩阵各个元素见表4。
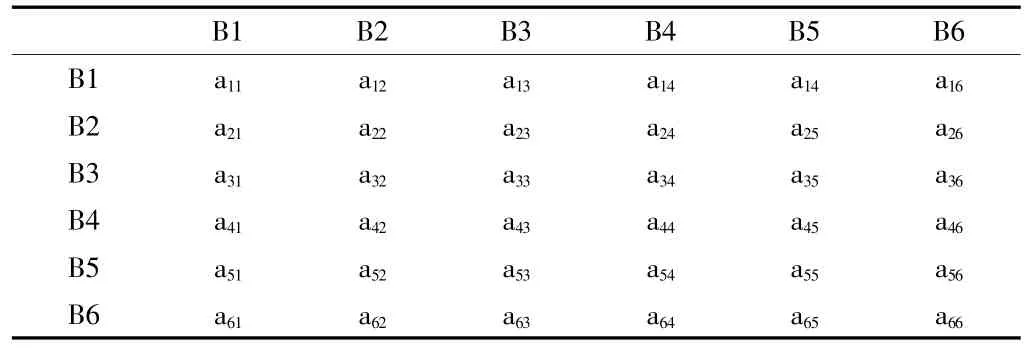
表4 一级指标判断矩阵
整理后一级判断矩阵
(4)根据一级指标判断矩阵A求出矩阵最大特征值λmax,并对判断矩阵进行一致性检验。
矩阵一致性指标:
定矩阵通过一致性检验,RI 与矩阵阶数关系如表5 所示。

表5 平均随机一致性指标
(5)当CR< 0.1,运用几何法求出一级指标权重向量并对其进行归一化处理:
对所得权重向量归一化处理:
权重向量wi=(w1w2…wn)T
得到一级指标权重向量:
根据上述所述,同理可求得二级指标的权重:
(6)根据层次分析法所得影响因素建立代表综合评价的多种影响因素集U= {B11B12B21B22B31B32B41B42B51B52B61B62}.
(7)建立多种指标构成的评判集
V= {V1V2V3V4V5V6}其中{V1V2V3V4V5V6}分别表示FSRA 系统综合评价的标语为“优”、“良”、“好”、“中”、“差”、“很差”。根据规定评价集中各元素的量化值为V1= 100,V2= 85,V3= 70,V4= 60,V5= 50,V6= 30;
由于因素集各因素对评判事务的影响不同,因此结合指标层的指标权重分配可得:
评语并不是绝对的而是相对的,故综合后的评判可认为是上述的模糊集,记作:
其中Cm表示第m种评语在评判总体中所占地位。
(8)构造一个从U到V的模糊关系
对每一个Bi,分别进行模糊综合评测,单独考虑Bi下的指标Bij,通过德尔菲法隶属于Bij第K 各评语的VK的程度,得到Bi下模糊评价矩R1,R2,R3,R4,R5,R6。
(9)根据
得到指标的评判集合的评测:
(10)根据德尔菲法获取的模糊评价矩阵经过模糊综合评价数学模型得到FSRA 系统整体评价的分数。
5 结论
全速自适应巡航系统的综合评价体系的完善是推动驾驶辅助系统的基础。针对传统测试评价方法不能够多维度评价功能系统的问题,本文所提出的基于自然驾驶数据的全速自适应巡航系统的综合评价方法,以自然驾驶数据集为系统整体评测的客观数据样本进行数据的处理和分析,并对客观指标分析,然后由专业试验人员从安全性、舒适性、适应性、稳定性、准确性、跟随性六个维度对FSRA 系统进行主观的打分,最后运用层次分析法和模糊综合评价法将定量分析与定性分析结合对系统进行综合评价,在一定程度上完善了FSRA 系统评价体系,为ADAS 系统其他功能模块的相关标准的制定和体系完善提供一定的参考。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
防爆电机(2022年4期)2022-08-17
计算机应用(2018年12期)2019-01-08
商周刊(2018年26期)2018-12-29
中国交通信息化(2017年9期)2017-06-06
中央民族大学学报(自然科学版)(2016年3期)2016-06-27
项目管理技术(2016年8期)2016-05-17
南都周刊(2015年4期)2015-09-10
南都周刊(2015年3期)2015-09-10
南都周刊(2015年1期)2015-09-10