基于物联网的车辆运输安全智能监测预警系统研究
2023-11-24 06:19付晓荣
装备制造技术 2023年9期
付晓荣
(湖北国土资源职业学院,湖北 武汉 430090)
车辆运输安全管理对道路安全行驶意义重大,特别是特种作业车辆的安全管理需要具有更加严谨的管理设计。为提高特种运输作业车辆的安全管理水平,降低特种运输作业车辆的事故发生率,将利用物联网技术设计出一种智能监测预警系统,借助卫星定位与图像距离监测终端设计,为车辆提供及时科学的预警监测,可为推动特种运输作业车辆的安全管理奠定基础。
1 系统设计
1.1 硬件
1.1.1 测距传感器设计
所提系统的硬件总体架构可分为数据采集模块、显示模块、数据处理模块、定位模块、声光预警模块以及应急刹车模块等。该系统架构中选择蓄电池组作为整个系统的能量来源。选择LPC2214 单片机作为系统的控制器,在其中嵌入智能监测预警系统。选择测距传感器作为检测带电碰撞设备与本车的距离。智能监测预警系统设计简图如图1 所示。其中,数据采集模块主要包括CDD 图像采集装置、激光测距传感器、速度传感器以及ACN 总线等。CAN 要与协议控制器相连接,以方便达到高效率传输监测信息数据的目的。声光预警模块由蜂鸣器和LED 警告灯组成。选择640×520 的液晶显示屏作为主要显示装置。当车辆与带电障碍设备距离较近时,LED 液晶屏与警告灯将会一直闪烁,同时蜂鸣器还会持续发出长鸣,直到车辆与带电障碍设备维持在安全距离。
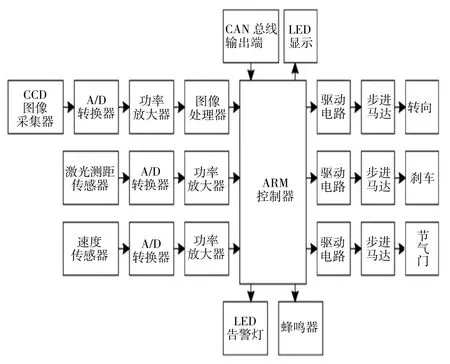
图1 智能监测预警系统的硬件结构
1.1.2 测距传感器采样电路优化
通过对信号的放大、降噪和过滤,实现对特种作业车与有电障碍装备间的细微间距变化进行探测,感知二者间的微小距离变化情况。利用LPC2214 对激光距离测量装置进行控制,使该装置的半导体激光管内射出激光;当激光光束遭遇车辆前面的障碍时,会产生扩散反射,反射信号会被探测装置所采集;定时装置测量出脉冲激光器的发出及接收时刻,并通过LPC2214 对其进行读出。优化后的电路如图2 所示。

图2 优化后测距传感器的采样电路
硬件中的测距传感器采用Asm1117-5 稳压芯片,并用其作为采样电路的核心芯片。因该芯片中有2 个发光二极管能够向外提供2 A 的输出电流,可满足系统中模块的正常要求。同时,选择复位电路、滤波放大电路、时钟晶振电路以及微控制器作为系统的采样电路,实现将距离传感器采集的信号转换为电压信号。通过在芯片引脚上加入1 个上拉电阻和引脚间加入1 个100 nF 电容的方式消除电信号中的干扰,即消除去耦滤波。另外,需要借助无源晶振为LPC2214单片机提供科学准确的时钟振荡,以此方式确保特种作业车辆行驶中安全距离测量的精度[1,2]。
1.2 系统软件设计
系统软件计算特种作业车辆与前方障碍物或带电设备之间的距离,通过比较计算距离和安全距离,判断是否报警。在特种作业车辆上安装2 个CDD 摄像机,CDD 摄像机安装位置要尽量与障碍物和带电设备持平,摄像机分别位于左右两侧,视角范围为60°。CDD 摄像机拍摄障碍物或带电设备图像时,将障碍设备简化为1 个点。设2 个CDD 摄像机之间的距离为C,障碍设备成像点与2 个CDD 摄像机中心的夹角分别为r1、r2,CDD 摄像机焦距为B,计算成像点偏离2 个CDD 摄像机中心的距离A1、A2。
在此基础上,利用该系统对特种作业车与电力障碍装置的间距进行估算,并将其与安全间距进行对比,从而实现对特种作业车的安全预警。将2 台CDD摄影机装在特种作业车辆上,CDD 摄影机的安装位置尽可能与障碍物处于平行状态,摄影机置于左右两边,角度范围为55 ~60°[3]。在CDD 相机拍摄过程中需要将障碍简化成一个小点。将两个相机间的距离设为C,并且将障碍装置成像点与两个相机之间的中心夹角设置为r1和r2,然后设照相机的焦点为B,成像点偏离2 个摄像机中心位置的距离设置为A1和A2。
结合上述可对“L1”障碍设备与摄像机的距离进行计算。将L2视为特种作业车辆与障碍的距离。由上式可得出障碍物与特种作业车辆的物距L2。
式中:t1表示系统测时单元脉冲激光的发射时间。t2表示系统测时单元对脉冲激光接收的实际时间。v表示激光束在特种作业车辆与障碍物之间的传播速度。
将L2数据当做测距传感器实际测得的距离,为进一步提高测量距离的精度,还需要取L1和L2的平均值“L”当做最终距离数据,特种作业车辆与障碍装置之间的安全距离“S”的计算式为:
式中:T表示特种作业车辆的实际反应与协调时间。a表示特种作业车辆反应前的加速度。V表示特种作业车辆在反应动作前的行驶速度。E表示特种作业车辆与障碍装置之间存在的危险距离。
若L大于S则系统不报警,若L小于S时则系统便会开始报警。
1.3 车辆启动时的信息采集设计
除上述设计之外还需要采集车辆启动时的信息,以判断车辆是否处于长时间行驶,便于系统提醒驾驶员疲劳驾驶、注意安全。行车间距探测是在汽车超速运行的情况下,提示司机与汽车之间的间距。在针对疲劳驾驶方面,该系统是用监控汽车的起动状况来完成的。当汽车起动的时候,在车载终端中的定时器就会开始计时,当它到达一个预定的时刻后,就会发出一个警告,警告驾驶员要注意休息。考虑到一些情况下,汽车没有熄火的情况下,驾驶员会在半路上进行一次短暂的休息,因此,在车载终端上会安装一个计时复位按钮。当驾驶员在休息结束后,继续行驶的时候,就可以按下这个按钮,再次进行记录[4]。
2 试验分析
2.1 试验设计
该系统的软件采用的是C 语言编写,其软件开发平台是一个集成的开发环境,并将设计完成的系统在PC 机中进行试运行。PC 机的处理器采用的是Intel(R)Core(Tm)i7-4590 CPU,16 G 内存。在启动过程中,对各个功能进行了初始化,使专用车辆能够对前面的带电装置进行及时的距离报警。特种作业车辆的行驶道路是干燥沥青路面,设置最小转弯半径处于1 ~1.5 m 之间[5-7]。
2.2 试验结果分析
2.2.1 初始预警时间测试
为体验出本设计的可行性,将以基于驾驶风格的预警系统和基于毫米波雷达的预警系统作为对比。三种系统的初始预警时间见表1。

表1 初始预警时间的对比测试结果
从表1 的数据可以看出,结合物联网设计的系统预警均时碰撞前2.198 s,相比于基于驾驶风格的预警系统和基于毫米波雷达的预警系统两种方法,其预警时间均值分别缩短0.696 s、0.909 s,保证安全距离预警的实时性和特种作业车辆的安全。
2.2.2 预警正确率测试
同样选择上述两种方法进行比较,多次试验结果数据(表2)。

表2 预警正确率的对比测试结果
从表2 的数据可以看出,结合物联网设计的系统预警正确率为100%,基于驾驶风格的预警系统为93.58%、93.35%,基于毫米波雷达的预警系统为92.18%、92.30%。
2.2.3 预警距离测试
假设特种作业车辆与带电障碍设备之间的安全距离0.3 m。预警测试数据如表3 所示。
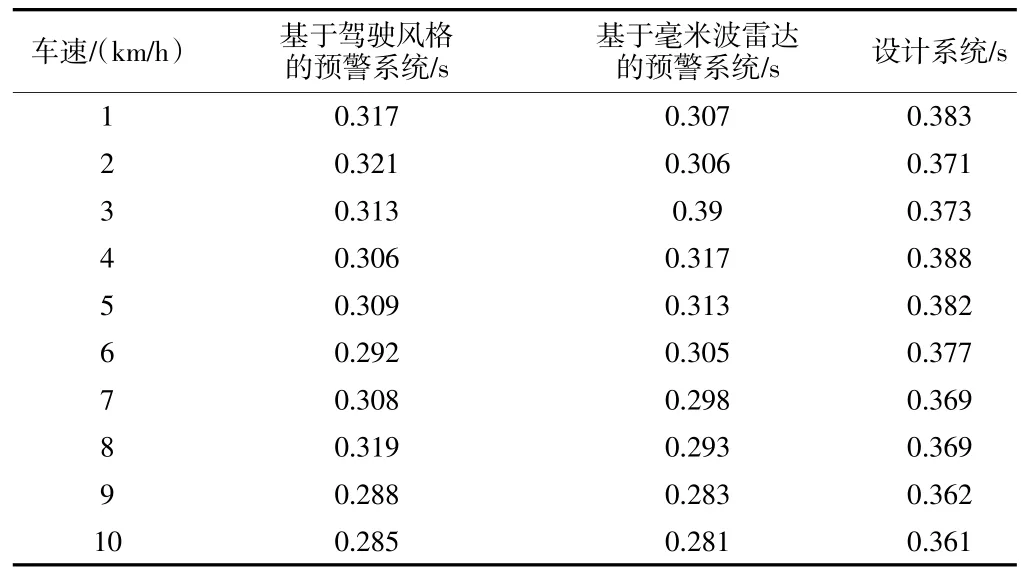
表3 预警距离的对比测试结果
从表3 的数据可以看出,结合物联网设计系统的平均预警距离能够达到0.374 m,高于设置的安全距离,可在不影响车辆行驶的前提下为车辆提供充足的反应时间与距离。而另外2 种系统的预警距离均值分别为0.306 m、0.3 m,均贴近设置的安全距离,虽然同样具有良好的预警能力,但是与本文所提方法相比,预警效果较差,且随着车速的不断增加实际预警距离还会逐渐减小,存在一定的安全风险。
3 结语
结合物联网设计的车辆运输安全监测预警系统具有良好效果,可为车辆在极短时间提供碰撞预警,有效降低车辆安全事故的发生概率。
猜你喜欢
小哥白尼(军事科学)(2022年8期)2022-09-20
小学科学(学生版)(2021年2期)2021-03-29
民用飞机设计与研究(2020年4期)2021-01-21
河南科学(2020年3期)2020-06-02
电子制作(2019年11期)2019-07-04
少儿美术(快乐历史地理)(2018年1期)2018-09-25
农村百事通(2017年9期)2017-07-07
中国交通信息化(2017年12期)2017-06-06
中国公共安全(2017年11期)2017-02-06
办公自动化(2016年18期)2016-12-17