基于步进电机综合性能的智能化检测系统设计
2023-11-24 06:20聂亚龙
装备制造技术 2023年9期
聂亚龙
(桂林信息科技学院,广西 桂林 541004)
0 引言
步进电机在许多自动化控制领域都扮演着重要角色。步进电机是一种将电脉冲信号转化为角位移或线位移的电机,属于开环控制电机[1]。因此它无需反馈电路就可以实现速度及定位控制。在额定负载情况下,脉冲信号的频率与步进电机转速成正比,脉冲信号的脉冲数决定了步进电机转动的位置。当输入一个脉冲信号给步进电机驱动器驱动,则会驱动步进电机按指定方向转动一个固定角度[2],因此可以控制脉冲数使步进电机转动指定角度,从而达到精确定位。可随着步进电机负载或转速的增加,步进电机会出现丢步或者堵转的现象,在高精度自动化领域这是一个致命问题,轻则影响设备精度,重则导致整个设备故障,因此使用步进电机时必须在其规定参数下运行保障电机不出问题。根据公司研发人员反馈,虽然步进电机出厂前都会标定相关性能参数,但在实际应用中部分电机并非和标定的参数指标相符。若步进电机不做实际性能参数测试,根据标定的性能参数直接将其应用于高精度仪器中,则会大大降低仪器精度。因此在精度要求高的场合需对步进电机性能做测试,传统步进电机性能测试装置测试的性能参数较少,不够智能化。
快速准确地测量出步进电机的性能参数显得尤为重要,智能化步进电机测试系统只需在上位机显示端设置测量参数,系统会自动根据参数做相应的测试,最后会将测试结果在上位机显示端进行显示。它可对步进电机步距角、矩频特性、静力矩、牵入力矩与牵出力矩进行智能化测试,可用于解决传统步进电机测试系统测试参数少,测试速度慢,不够智能化的问题。准确测量步进电机相关参数对自动化设备的稳定性能更有效控制。
1 智能化步进电机测试系统总体构成
智能化步进电机测试系统检测结果可在上位机上进行显示。脉冲检测传感器与负载机、负载机与扭矩传感器、扭矩传感器与步进电机都通过联轴器进行连接,可实现同步旋转,总体构成如图1 所示。主控制器经过光电隔离模块后给电机驱动电路模块下发控制信号,使步进电机完成指定旋转。主控制器经过光电模块后给负载机驱动电路模块下发控制信号,使负载机施加指定负载。扭矩传感器将检测到的力矩值通过放大整形电路模块进行放大处理,处理后的信号通过AD 转换模块变换为数字信号,AD 模块转换后的数据信号最终由主控制器处理。脉冲检测传感器将步进电机实际行走的脉冲信号上传给主控制器,主控制器将实际下发脉冲数与脉冲检测传感器检测到的脉冲数进行对比,进而检测在负载机施加指定负载下步进电机是否失步和检测是否由脉冲突变。上位机显示单元可将结果显示,也可下发控制指令到主控制器。存储器模块存储检测数据。
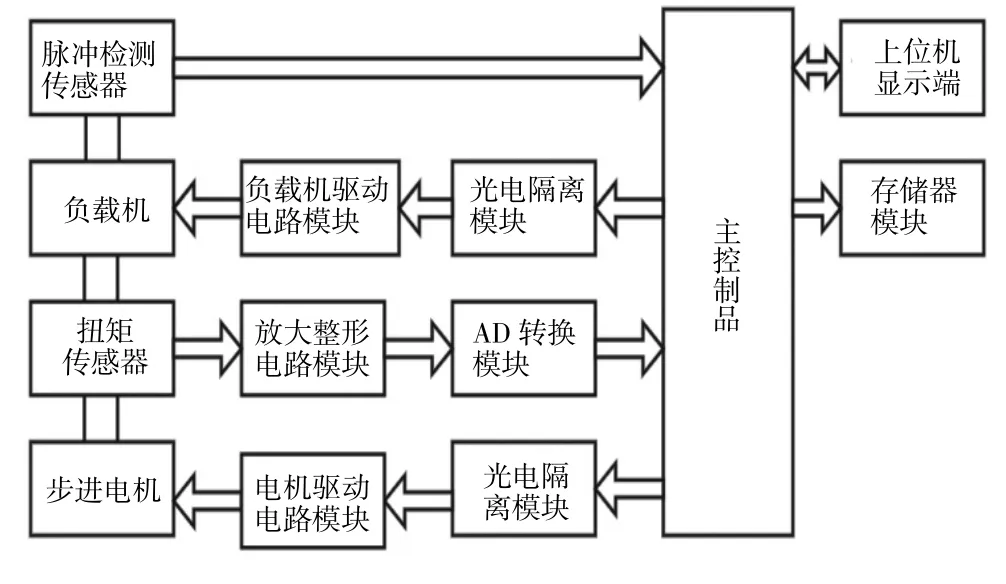
图1 智能化步进电机测试系统总体构成
2 步进电机性能参数测试方法
步进电机在使用过程比较重要的参数有步距角精度、牵入力矩、牵出力矩与静力矩。
2.1 步距角精度测量方法
采用电机驱动芯片对步进电机发送驱动脉冲,步进电机接收到脉冲序列后转动相应的角度[3],脉冲传感器可检测步进电机行进的实际角度。脉冲传感器检测到步进电机行进的实际角度与步进电机根据控制信号可行进的理论角度进行对比。通过对比可计算出步进电机的步距角精度,步距角精度值可在上位机中显示。
2.2 矩频特性曲线测量方法
矩频特性曲线是力矩与频率的对应关系图,体现步进电机的动态力矩特性[4],测量步进电机矩频特性曲线时,主控制器发送控制信号到步进电机,使步进电机按指定频率匀速空载运行。之后主控制器发送控制信号到负载机,使负载机缓慢施加负载力矩。用脉冲检测传感器检测步进电机是否出现失步或扭矩传感器检测值是否有突变。若出现失步或扭矩传感器扭矩值突变则用扭矩传感器测量此时的扭矩值。通过主控制器改变步进电机匀速运行频率重复以步骤即可得出一组矩频特性数据。主控制器将矩频特性数据处理在上位机显示上显示矩频特性曲线。
2.3 牵入力矩测量方法
主控制器发送控制信号至负载机,使负载机产生恒定的负载力矩,之后通过控制器发送恒定频率脉冲控制信号至步进电机,若步进电机能和主控制器发送的恒定频率脉冲同步无丢步,则步进电机在该恒定频率脉冲下可将该负载力矩大小的负载拉入同步。主控制器发送至步进电机的恒定频率脉冲控制信号不变,改变负载机施加的负载力矩。反复实验可得出步进电机在该恒定频率下的最大负载转矩即牵入转矩。
2.4 牵出力矩测量方法
牵出力矩又称运行力矩,指步进电机在恒定速度下能够提供的最大转矩。通过测量矩频特性曲线,从矩频特性曲线横坐标下找到所测量的速度值,其所对应的纵坐标值即为步进电机输出的最大转矩值。
2.5 静力矩测量方法
静力矩有时也成为保持力矩,它表示步进电机通电但没有转动,定子锁住转子的力矩,在测试过中静力矩与步进电机低速运行时的最大转矩基本相等,因此静力矩可在矩频特性曲线低速时的最大转矩得出。
3 硬件电路设计
3.1 系统主控芯片
整个测试系统使用STM32F405 作为主控核心芯片,电路图,见图2(下页)。主控芯片输出指定脉冲给步进电机驱动器A5977 芯片,A5977 驱动步进电机进行转动。扭矩传感器将扭矩值转换为电压信号,主控芯片通过AD 芯片可读取到扭矩传感器测量的扭矩值。主控芯片控制负载驱动电路控制磁滞制动器施加负载。主控芯片可与上位机进行通讯,可将测量到的步进电机参数值在上位机上进行显示,同时上位机可下发指令给主控芯片对整个测量系统进行控制。
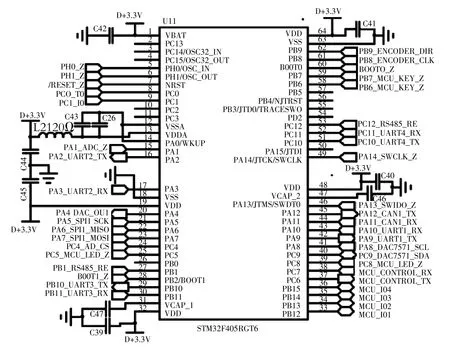
图2 主控测量电路
3.2 电机驱动电路
A5977 芯片是一款内置转换器的不进电机驱动器。它可以进行整步、二分之一、四分之一和八分之一细分。其最大输出能力可达40V 和±2.8A。图3 为A5977 驱动步进电机电路,A5977 驱动芯片的驱动电流计算方式为:VREF÷(8×RS)在测试时可能会对不同的电机进行驱动,驱动电流也会发生变化,因此用了一个DAC5571 数模转换芯片,DAC5571 输出电压引脚VOUT 与A5977 芯片的VREF 引脚相连。DAC5571 通过IIC 与STM32 控制系统相连接,VOUT的输出电压可以通过STM32 进行调节,最大输出电压为供电电压VDD。R79 与R80 为0 Ω 电阻可以选择基准电压控制方式。
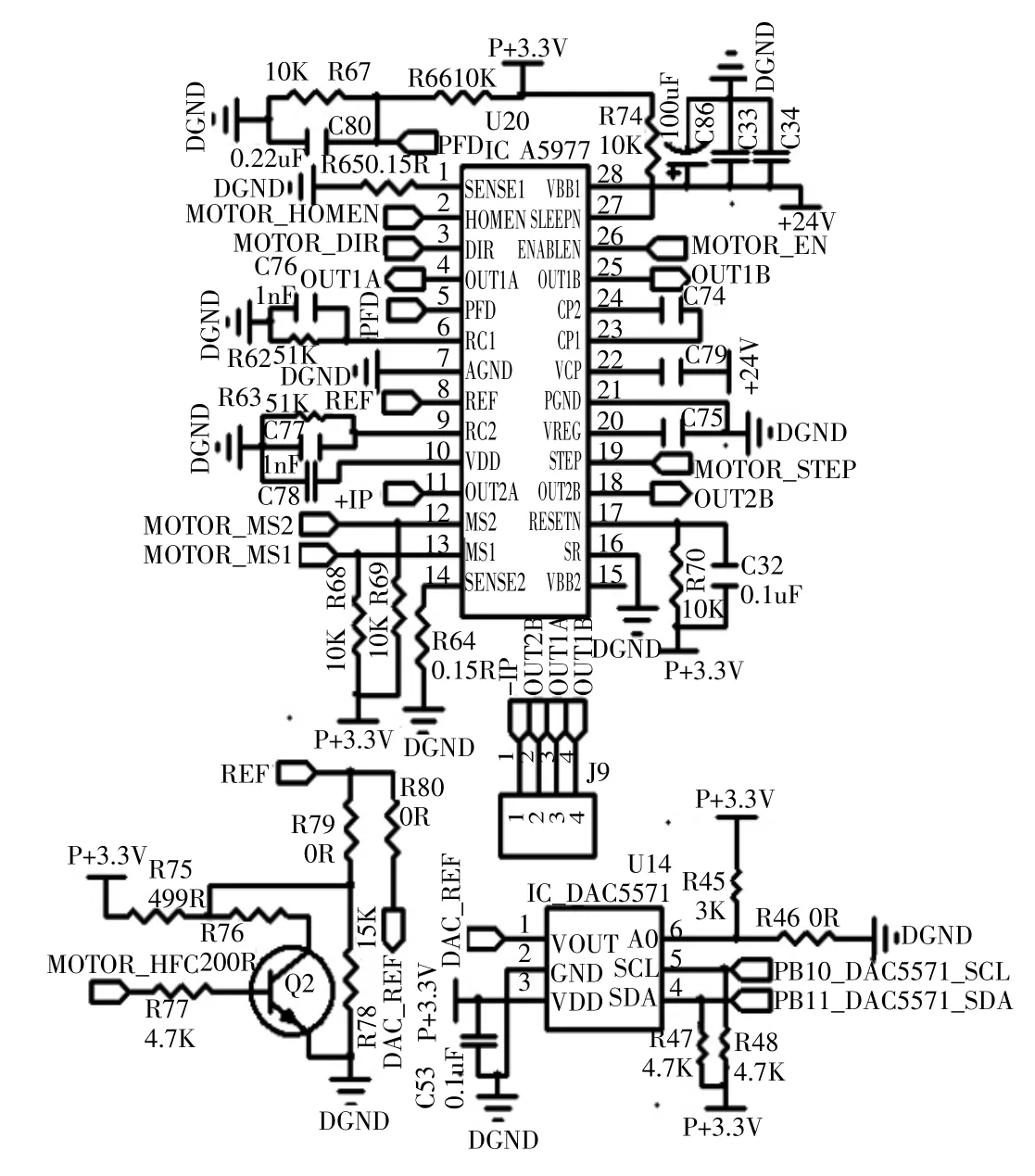
图3 A5977 步进电机驱动电路
3.3 负载机驱动电路
磁滞制动器用来对步进电机进行加载,磁滞制动器输出扭矩大小与其输入电流大小成正比,2 N·m 的磁滞制动器输入电流范围在0 ~315 mA,主控芯片无法实现指定电流大小的输出,可通过配套的磁滞控制器实现对磁滞制动器的控制,对磁滞控制器输入信号0 ~5 V 的电压信号,其可成比例输出0 ~315 mA的电流信号,主控芯片通过IIC 与数模转换DAC7571芯片通讯,指定其输出输出0 ~5 V 电压信号,从而间接控制制动器施加指定扭矩。图4 为DAC7571 数模转换电路。DAC7571 芯片供电电压为5 V 与STM32供电电压不兼容,因此通讯时通过PCA9306 芯片进行电压转换,保证通讯数据准确性。

图4 DAC7571 数模转换电路
3.4 扭矩传感器采集电路
磁扭矩传感器会将扭矩值转换成电压信号,因此通过ADS118 模数转换电路将扭矩传感器的电压转换成数字信号,通过SPI 通讯将扭矩值传输给主控芯片进行处理,ADS1118 模数转换电路如图5 所示。
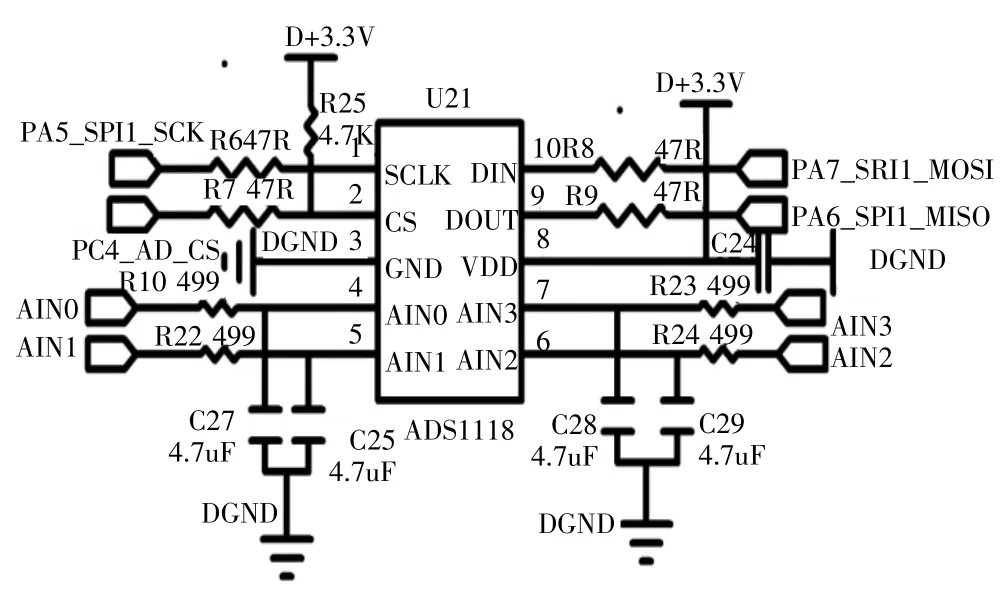
图5 ADS1118 模数转换电路
3.5 脉冲检测电路
脉冲检测传感器可以精确测量步进电机的转动角度,会将转动叫角度信息转换成脉冲信号,主控芯片通过检测脉冲信号的数量即可得出步进电机转动的角度。
4 软件部分设计
主要测量的数据有3 项, 分别为步距角精度、矩频特性曲线、牵如力矩。牵出力矩可以在测量矩频曲线中得出,静力矩可在矩频特性曲线低速时的最大转矩得出。程序软件流程图如图6 所示。主控芯片通过串口与上位机进行通讯。在测量过程中只需将测量参数填写在上位机中,上位机会通过串口通讯将指令下达给主控芯片,主控芯片控制设备运转进行测量。测量完成后,主控芯片会对数据进行处理,然后将测量结果发送到上位机,上位机接收到测量结果后进行显示。
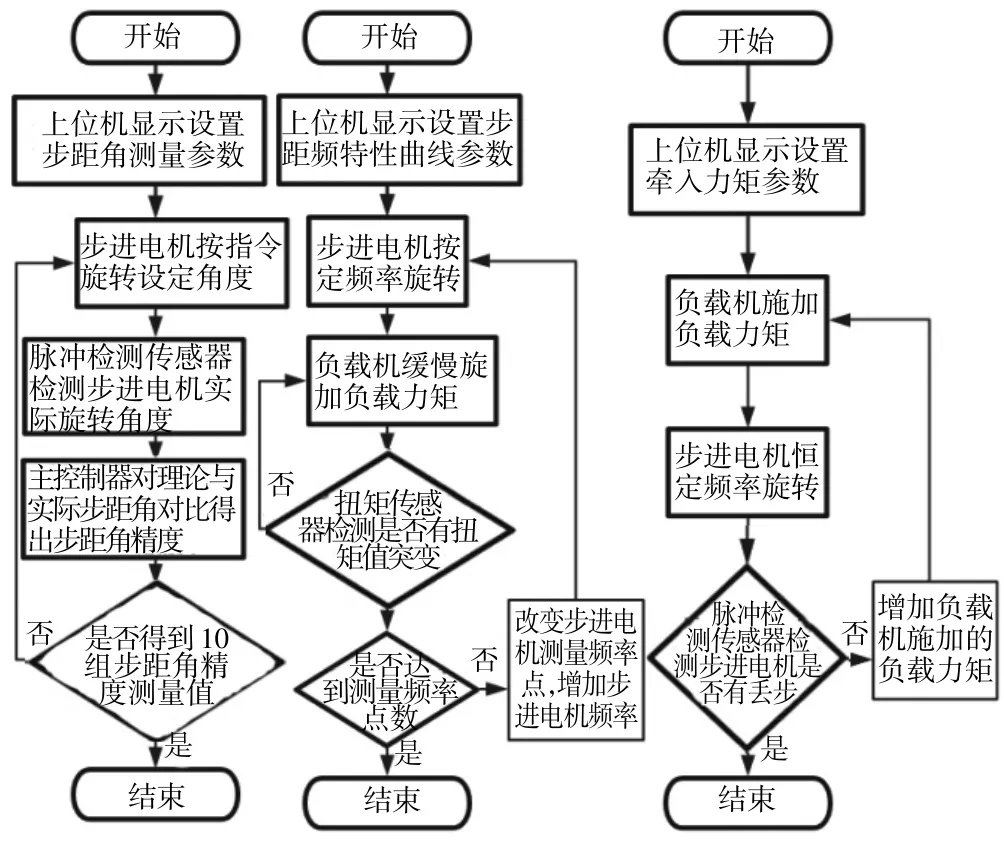
图6 程序软件流程图
5 测试与验证
5.1 测试工装设备
测试工装如图7 所示,测试过程中所用到的主控电路如图8 所示。被测量对象,选用某一批次鼎智42步进电机,其型号为17H2048,电流1.5 A,保持力矩0.48 N·m。

图7 测试工装

图8 测试电路板
5.2 步距角精度与牵入力矩大小测量
先为上位机设定参数,然后进行测量。上位机通过串口与主控芯片进行通讯,串口波特率可根据需要进行设定。步距角精度测量时将测量参数填入步距角测量界面,点击测试即可。同样的方法可对牵入力矩进行测量。
在电机参数设置界面设置对应的步进电机参数,因选用的被测试电机的驱动电流为1.5 A,最大保持力矩为0.48 N,所以在电机参数设置界面写入对应电机参数即可。细分数越多电机运行相对较为平滑,但细分数越多驱动力矩就会相应减小。因此,在测量步距角精度与牵入力矩大小实验时做了1 细分和8 细分两组实验。
细分数为1 时,测量10 组步距角精度求平均值得到步距角精度为0.01%。测量10 组牵入扭矩求平均值得到牵引扭矩为0.486 N·m 如图9 所示。同理细分数为8 时测量得到步距角精度为0.00625%,牵入扭矩为0.408 N·m 如图10 所示。在细分数为1 时测量的牵入扭矩与步进电机参数标定值基本一致,测量准确。
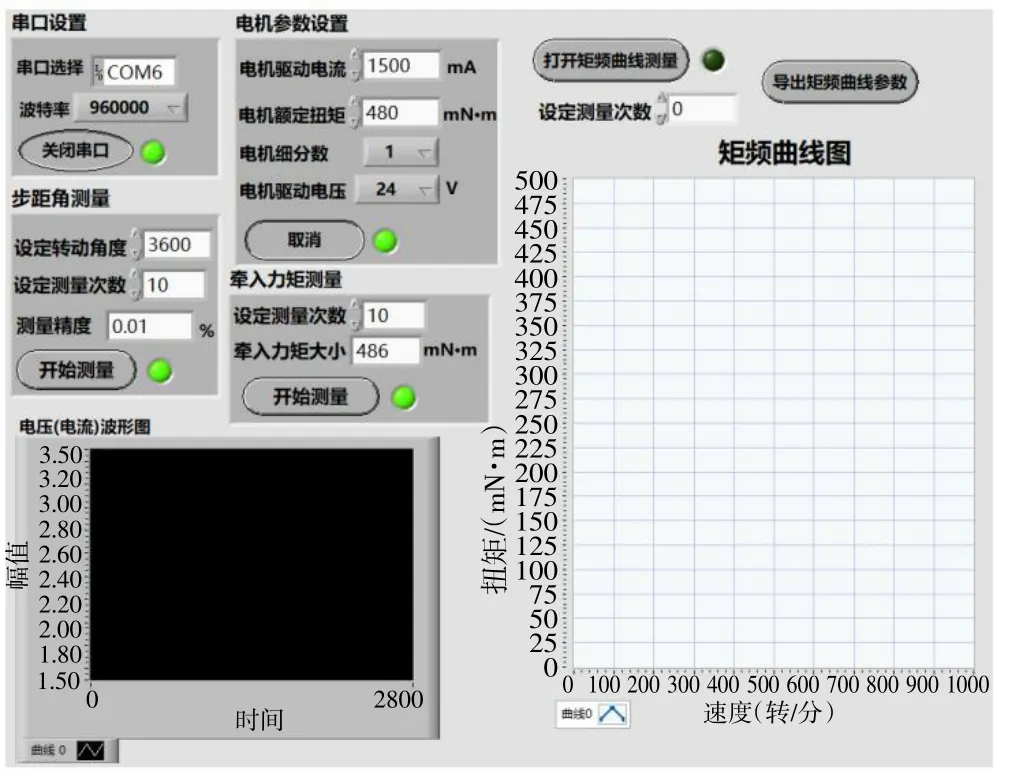
图9 系统测试结果1

图10 系统测试结果2
5.3 矩频特性曲线测量实验
步进电机矩频曲线测量时,使步进电机匀速空载旋转,之后用负载机缓慢给步进电机施加负载扭矩,检测步进电机是否有失步现象,若发现步进电机出现失步,则测量扭矩传感器此时的扭矩值。改变步进电机转速重复上述步骤即可得出一组矩频特性曲线。测量时只需按下打开矩频曲线测量按钮,上位机软件会随机生成速度点进行测量,若想测量多组矩频求平均值,只需填写设定测量次数即可。
在测量矩频曲线时分别测量了细分数为1 和细分数为8 时的矩频曲线,设定测量次数为5。细分数为1 时测量的矩频曲线如图11 所示,细分数为8 时测量的矩频曲线如图12 所示。从图11 可看出在1 细分下步进电机极低速度运行时的最大扭矩约为0.475 N·m。因此测量步进电机的静力矩为0.475 N·m。静力矩又称保持力矩,被测电机参数中保持力矩为0.48 N·m,与测量结果基本吻合,说明测量结果较为准确。

图11 系统测试结果3
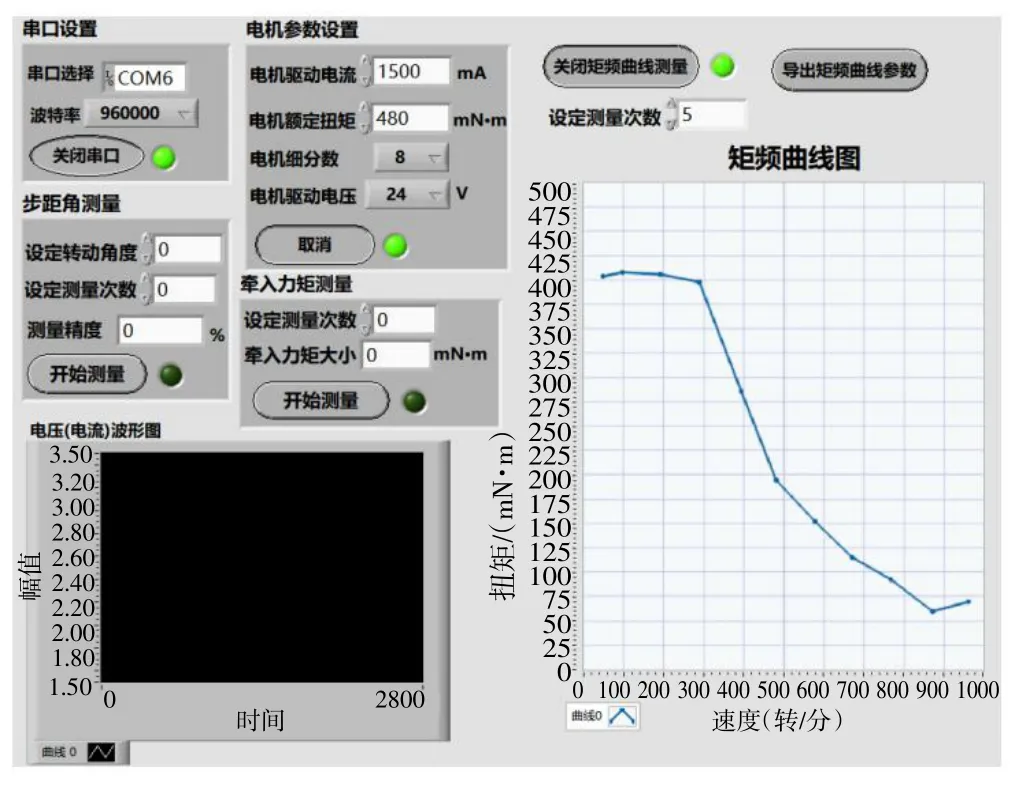
图12 系统测试结果4
为了方便对数据进行分析,测量的多组矩频曲线数据可以通过上位机导出,在上位机中只需点击导出矩频曲线参数按钮即可。细分数为1 时导出的5组矩频曲线数据经过整理得到表1 的数据。细分数为8 时导出的5 组矩频曲线数据经过整理得到表2的数据。通过对比表1 和表2 可知,细分数不同电机的驱动力也会存在很大差别。

表1 细分数为1 时测量的数据
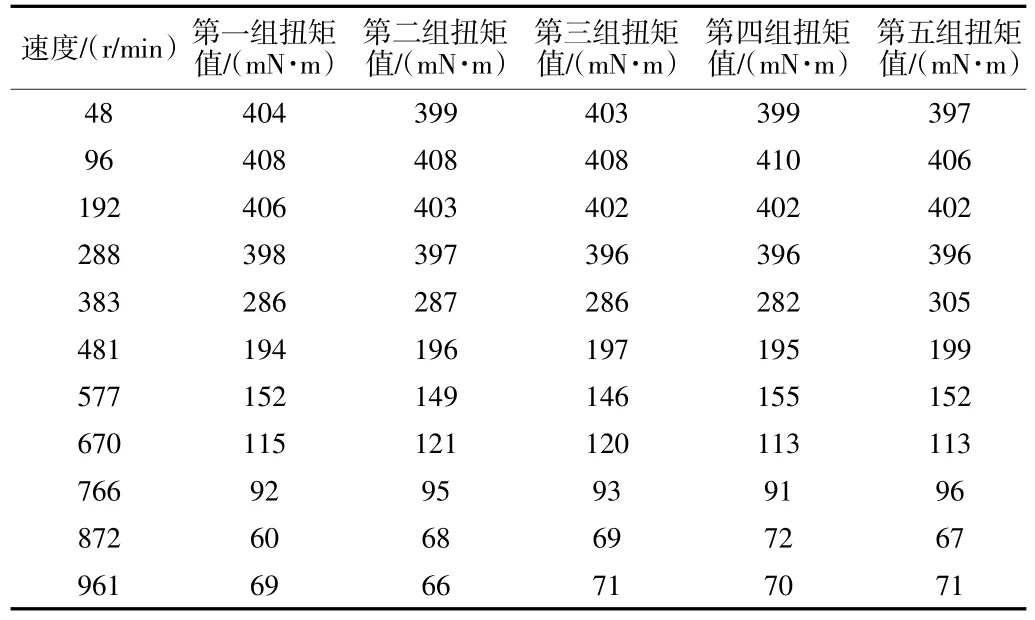
表2 细分数为8 时测量的数据
6 结语
本设计的一种用于智能化测量步进电机参数的装置已在笔者的公司使用,基本满足要求。在研发该装置前,公司员工选用步进电机时会根据数据手册的中的参数进行选择,这种选择存在细分数不同时测量出的参数存在很大差别,驱动电流不同测量的参数存在差别等问题。新的设计能指导工程师在合理的参数下运行步进电机,大大提高设备可靠性。
猜你喜欢
中国煤层气(2021年5期)2021-03-02
车迷(2018年12期)2018-07-26
凿岩机械气动工具(2017年3期)2017-11-22
山东青年(2016年12期)2017-03-02
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01
光学精密工程(2016年6期)2016-11-07
电子产品可靠性与环境试验(2016年6期)2016-05-17
航天制造技术(2016年6期)2016-05-09
探测与控制学报(2015年4期)2015-12-15