
多功能桥式行车实验台控制系统设计
2023-12-22 06:47李华强朱梅玉朱科军刘志辉陈志刚
装备制造技术 2023年10期
文 学,李华强,朱梅玉,朱科军,刘志辉,陈志刚
(1.邵阳学院 机械与能源工程学院,湖南 邵阳 422000;2.高效动力系统智能制造湖南省重点实验室,湖南 邵阳 422000)
0 引言
桥式行车作为一种常见的起重设备,广泛应用于工业领域。然而,在桥式行车的运行过程中,由于负载的摆动和行车的运动不稳定性,可能导致安全隐患和降低作业效率。随着科学技术的进步,桥式吊车的控制方式从早期的继电器-接触器控制系统逐渐发展为采用现代化技术的控制系统,如PLC 技术、变频器技术等。这些技术的引入有效地改善了吊车的控制精度和运行平稳性。
为了提高行车的自动化水平和操作安全性,研究人员和工程技术人员采用先进的控制技术,如输入整形控制[1,2]、最优控制[3,4]、模糊控制[5,6]等,致力于起吊过程的自动化与智能化。相应控制方法对桥式行车的摆角抑制都能起到了很好的控制效果。孙立坤[7]利用PLC 结合变频调速技术,改进控制系统,使起重机行走平滑、稳定。杨新军[8]结合PLC 和PC 设计一种抑制行车摆动的控制方案,阐述了软件和硬件设计过程。胡佳辰[9]介绍PLC 与变频控制技术的基础上,分析了PLC 与变频控制技术在港口行车中的具体应用和应用效果。邱光繁等[10]设计并搭建了一个三维桥式行车实验平台,模拟防摇控制系统实际动态特性和运行过程。
传统研究中所构建的实验平台使用了简化的物理模型,只能实现负载升降、左右移动等简单的逻辑控制,或者只针对特定功能或控制算法进行测试,忽略了一些实际情况中的复杂因素,例如海上的波浪和风力等。为此,设计一种多功能实验台,并满足其实验测试需求,对该实验台进行控制系统设计。
1 实验测试与控制方案设计
1.1 实验台模型
桥式行车实验平台基本功能结构参考实际桥式行车按比例缩小。桥式行车是主要由桁架模块、大车移动模块、小车移动模块、升降模块、驱动控制模块、工况模拟模块和各种安全保护装置组成。实验平台如图1 所示。
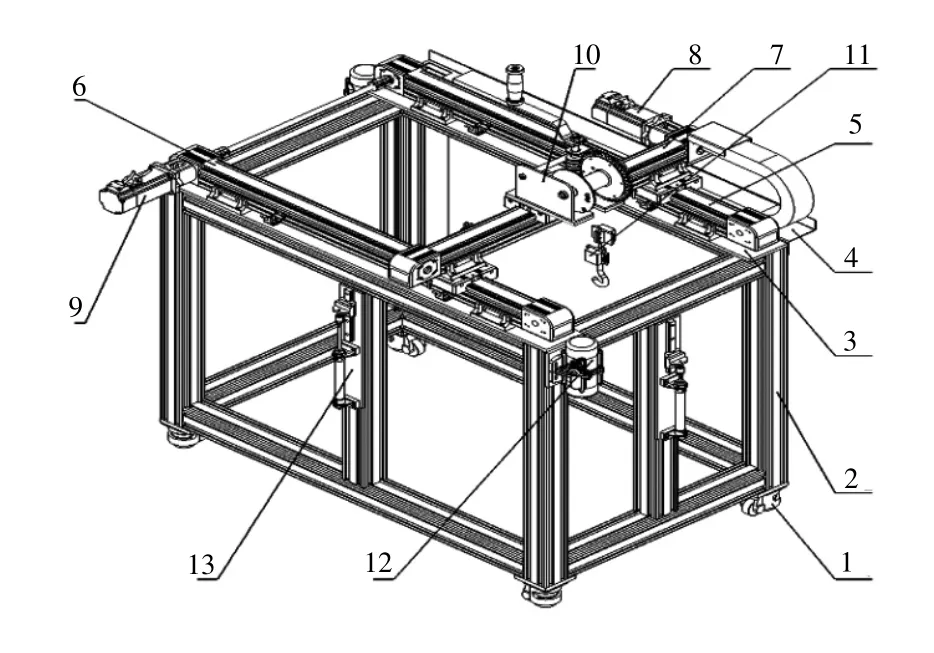
图1 桥式行车实验平台
该实验台能实现在X向(大车移动方向)、Y向(小车移动方向)和Z向(负载上下移动方向)平稳的三维运动,即可以实现在陆地工厂完成重物精确平稳移动。若桥式行车处于船舶上,受波浪起伏影响,该实验台可以启动振动电机或气缸电机,使台架振动或晃动,再控制负载在XYZ向上的移动,实现该工况的模拟。
1.2 功能需求与总体方案
1.2.1 功能需求
桥式行车实验台控制系统主要实现以下控制功能:
(1)大车、小车、起吊的启停及运动控制:通过PLC 控制变频器实现大车、小车在水平方向上的运动,包括前进、后退、和变速运动。触发左、右限位开关时,伺服电机停止运转,同时可以对伺服电机进行点动控制,实现大车、小车位置的微调。起吊在触发上限位开关时,电机停止运转,可以对伺服电机进行点动控制。
(2)工况模拟:模拟船舶上的波浪起伏影响,也就是12 振动和13 晃动带来的起吊过程中摆角变化,需要模拟其状态进行实验。
1.2.2 总体控制方案
根据桥式行车实验台系统的功能需求,设计制定了实验台控制系统总体设计方案(图2)。
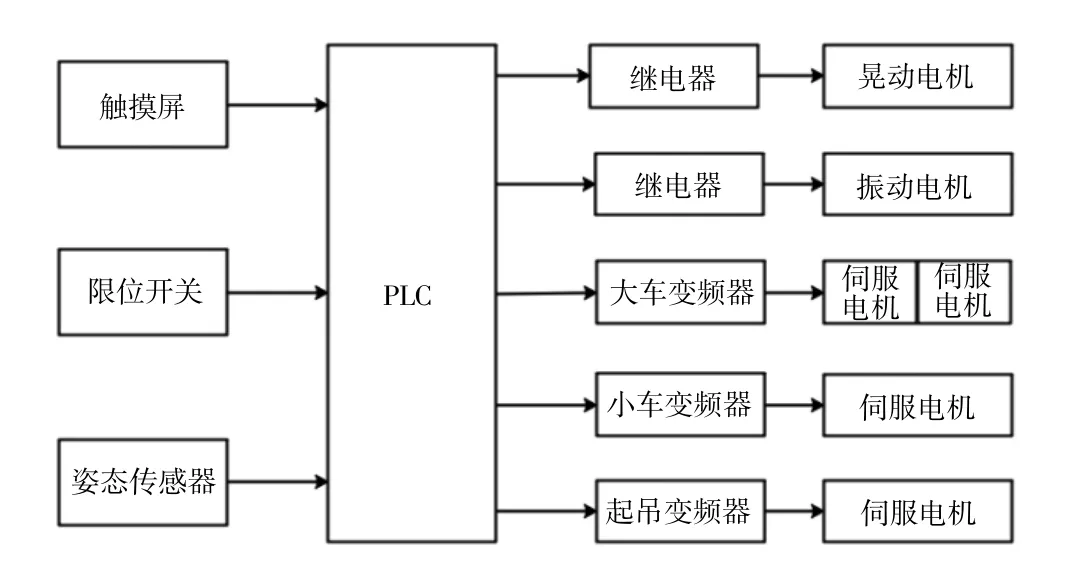
图2 实验台控制系统总体设计方案
控制系统主要包括上位机、下位机和各种传感器。上位机设置实验参数、在线监控各个执行机构的运行状态及故障信息等;由PLC 及对应硬件组成的下位机接收限位开关、姿态传感器的信息,然后PLC执行上位机对应指令,控制变频器,实现各个伺服电机的点动、复位和自动运行等功能。
该实验台采用两台电动机来控制大车的X向移动,由同一台变频器同时驱动控制。一台电动机控制小车的Y向移动,再由一台升降电动机通过控制卷筒的转动来实现负载的Z向运动,各采用一台变频器驱动。变频器可将交流电动机转变为高精度可变驱动器,实现负载移动位置的高精度控制。通过继电器控制振动电机及上下位移电机,实现船舶起伏工况的模拟。
2 硬件设计
2.1 变频器的选型
该试验台采用两台伺服电机来控制大车的水平移动,一台伺服电机控制小车的水平移动,另有一台升伺服电机通过控制卷轴的转动来实现负载的升降。本文采用FR-A740 性能卓越矢量变频器来驱动大车电机、小车电机和起升电机。FR-A740 是三菱电机公司生产的一款性能卓越的矢量变频器,是一种用于控制交流电动机转速和扭矩的设备。它采用先进的矢量控制算法,能够精确控制电机的转速和扭矩,在低速和高负载情况下保持稳定运行。其具有:较宽的速度调节范围,可适应不同工况下电机的速度调节需求;响应速度快,能够实时响应变频指令,实现电机的快速启停和转速调节;内置多种保护功能,如过载保护、过流保护、过压保护等,保障电机和设备的安全运行;支持多种通信接口,如RS485、RS232、Ethernet 等,便于与上位机进行通信和集成控制。
2.2 PLC 的选型
要实现桥式行车的自动化,PLC 装置必不可少,其广泛应用于工业自动化等领域。本文所设计的桥式行车采用三菱FX2N 系列的PLC,该系列PLC 具有高速运算能力和快速响应特性,可以实现对桥式行车的实时控制和高精度定位;具有较高的抗干扰能力和稳定性,适用于各种恶劣的工作环境。同时由于输入多输出少,设计的I/O 地址共有53 位输入和18 位输出,因此可以挑选FX2N-48MR,再添加2 路FX2N-16EX,总共56 位输入和24 位输出,有预留输入输出。同时,三台变频器由PLC 发出的模拟电压信号来驱动,再选择FX2N-4DA,该模块包括四个模拟输出。限位开关等接到PLC 的输入端,电机与变频器接PLC 的输出端,上位机与PLC 进行组网连接通讯。
2.3 PLC 的I/O 地址分配
考虑实验台的实际工况和控制要求,PLC 的I/O分配如表1 和表2 所示,根据I/O 分配,设计的PLC端口连接如图3 所示。
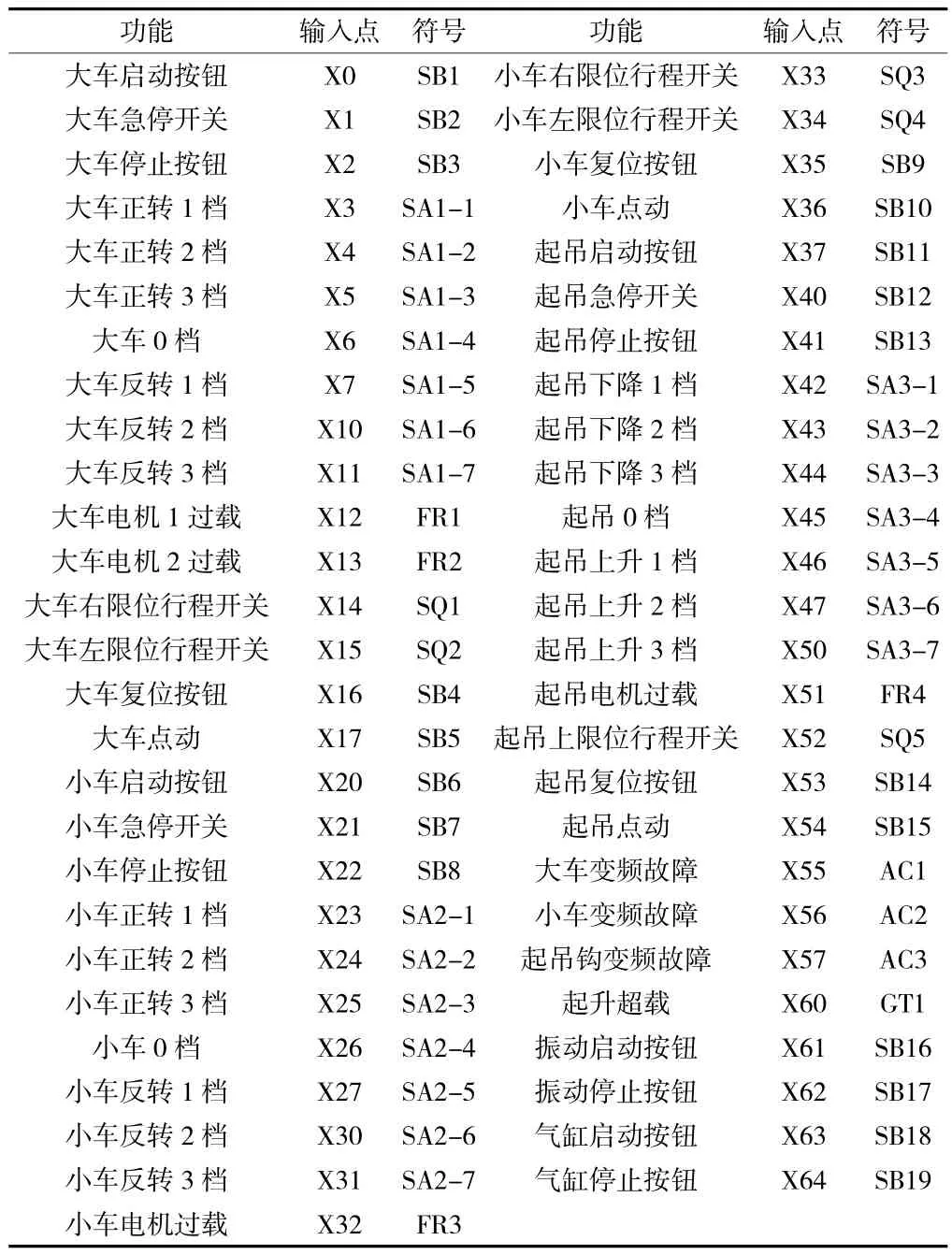
表1 试验台控制系统输入口分配
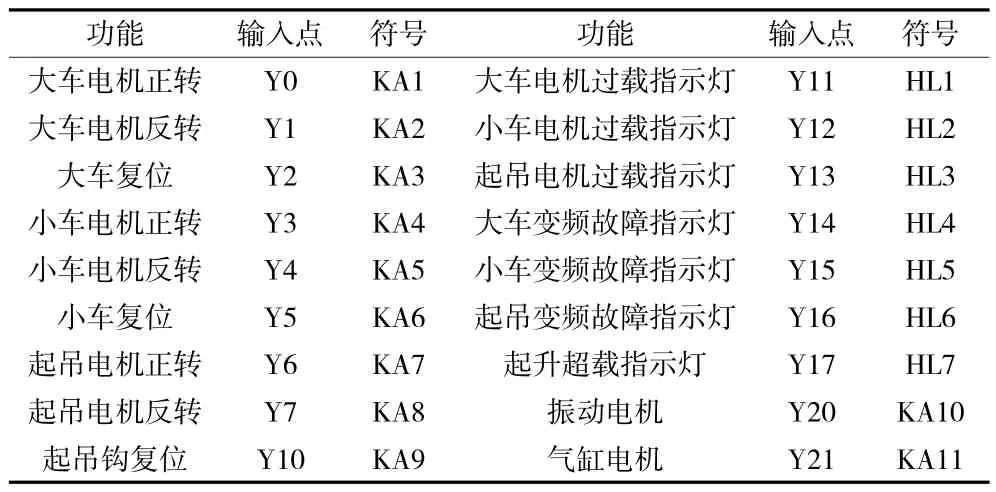
表2 试验台控制系统数字量输出口分配
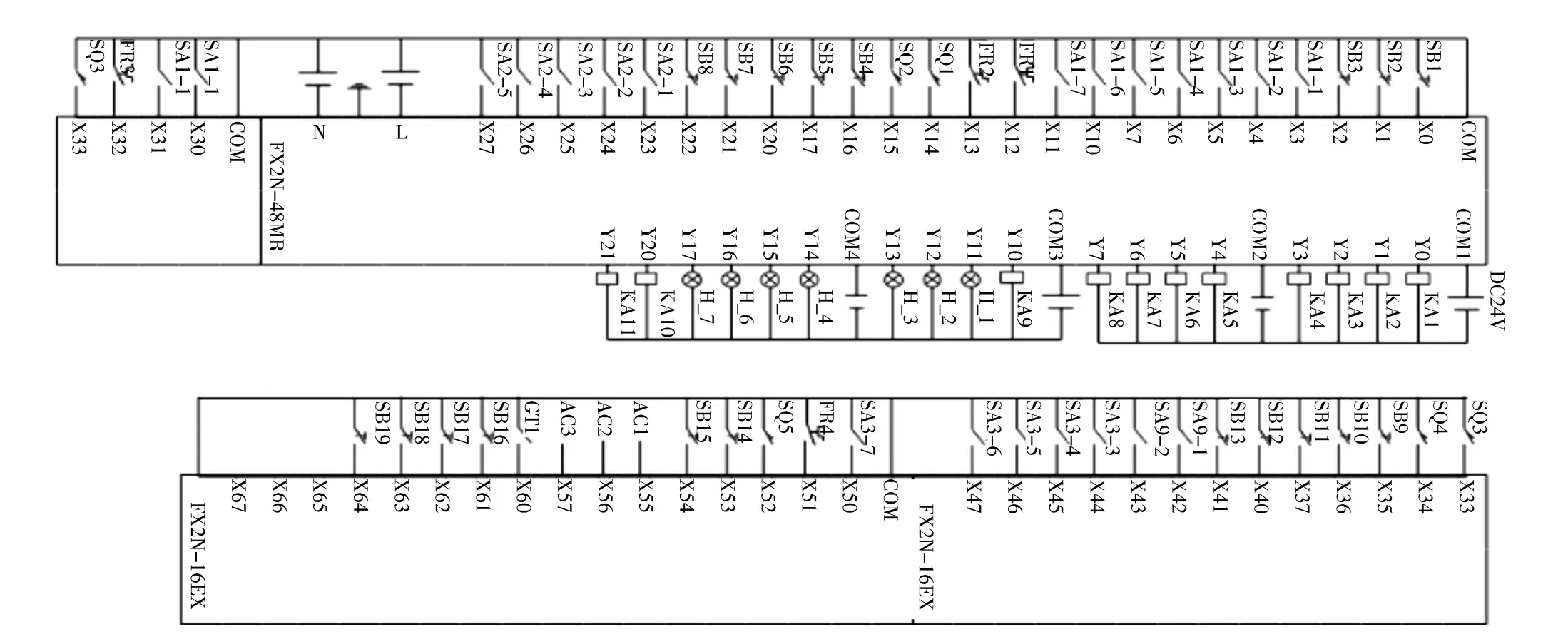
图3 PLC 端口连接
3 软件设计
3.1 PLC 程序框架
本实验台采用三菱编程软件来完成PLC 的软件开发,实现模块化编程。在实验台机械主体的基础上,通过选用三菱FX2N 系列PLC,设计接近开关与伺服电机的运动控制方案。整个桥式行车PLC 程序如图4 所示,主要分为大车控制、小车控制、起吊控制三个过程。
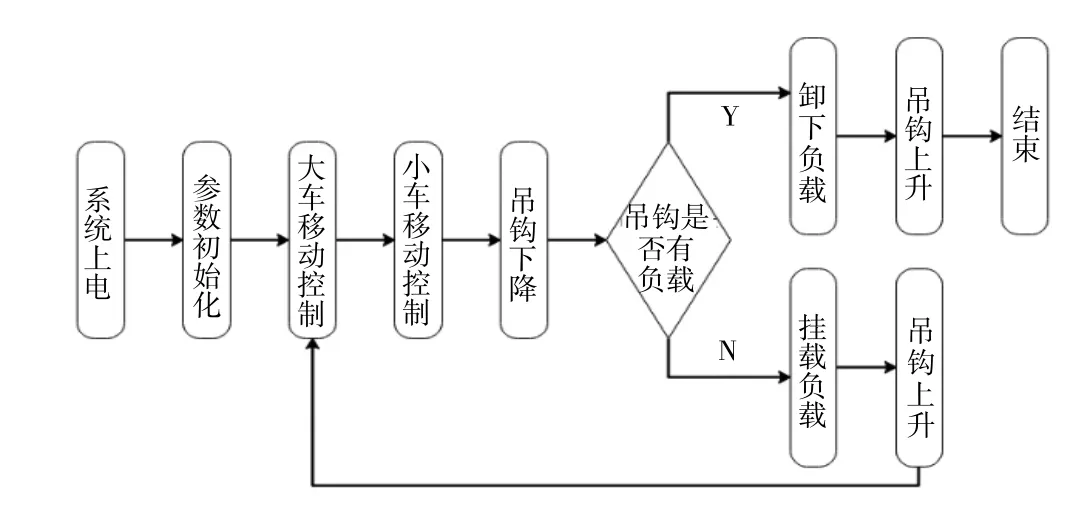
图4 PLC 程序总体流程
3.2 大车程序
当大车运行开始时,首先进行各项安全电路检查,如变频故障检查,过载检查,左、右限位检查。随后给大车移动设置速度,启动电机,大车移动,到达指定位置后大车停运。大车移动控制程序如图5。
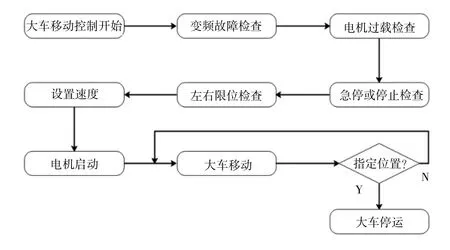
图5 大车控制程序
3.3 小车程序
小车的控制逻辑同大车相似,其移动控制程序如图6。
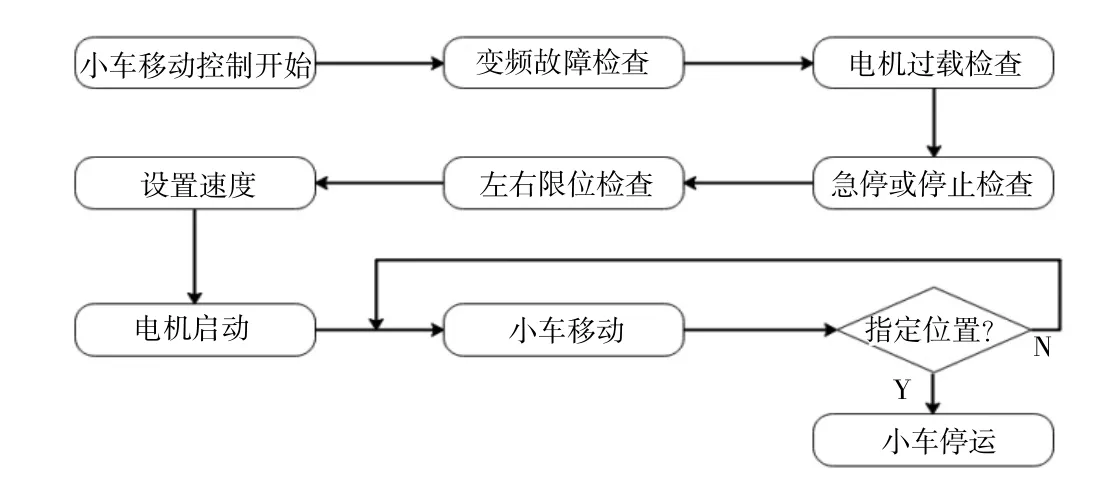
图6 小车控制程序
3.4 台架振动与晃动功能程序
进行振动和晃动工况模拟时,首先检查继电器和电机故障,然后进行工况选择:振动、晃动、振动及晃动,启动相应的电机,台架实现振动或晃动,再对大结束车、小车的控制。台架振动与晃动功能程序如图7所示。
4 人机界面设计
本设计方案利用GT Designer3 三菱触摸屏数控编程软件构建了试验台触摸显示屏仿真模型,调试完成了对桥式行车实验台的监管。根据模拟和调试,验证了应用程序的正确性,完成了试验台的控制要求。
触摸屏作为控制系统的上位机可以显示和输入控制参数,并可以在线修改、监控和显示报警详细信息。图8 为人机界面的主界面,用于显示设备状态,设有大车控制按钮、小车控制按钮和吊钩控制按钮,分别实现对大车、小车和吊钩的精准控制,并设有启动按钮、停止按钮、急停按钮、复位按钮等功能按钮。同时还设置各种速度选择按钮和各种故障指示灯。
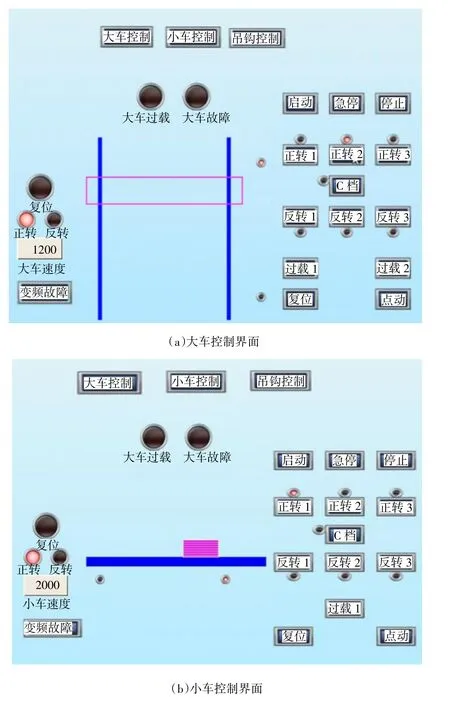
图8 人机界面
5 系统测试
应用PLC 软件的模拟功能并配合触摸屏对系统进行测试,验证大车移动控制程序。如图9 所示,采用逻辑控制编程方式对大车移动进行控制;其中M100是大车的使能条件,M101 为启动信号,X14、X15 为右极限、左极限。选择按下X3 时则Y0 得电后正转大车以1 档速度向右移动,遇到右极限位Y0 断电停止。选择按下X7 时则Y1 得电后反转大车以1 档速度向左移动,遇到左极限位Y1 断电停止。选择按下X17时则实现大车的点动移动,按下X16 实现复位。通过不同速度X3、X4、X5 或X7、X10、X11 之间联锁,Y0和Y1 互锁,大车只能以一个速度移动。这种控制方式控制可靠,能让大车准确停靠在目标位置。
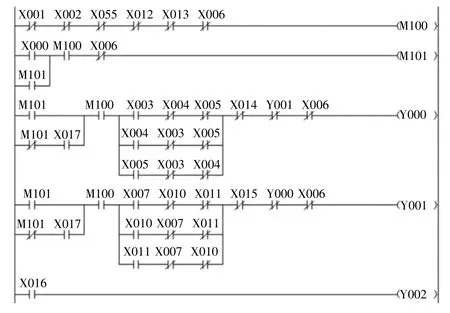
图9 逻辑控制程序
经过充分的仿真试验后,需要搭建实验平台来进一步对系统的控制程序进行调试实验。根据所选设备进行硬件的安装与调试,搭建与实际桥式行车结构相近的桥式行车实验平台物理模型,其中包括起重机主体、计算机、位移传感器和控制箱等,如图10 所示。
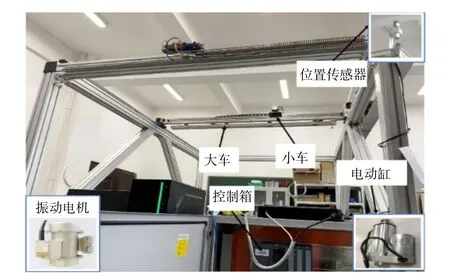
图10 桥式行车模型实物
在该实验平台实际应用后,实现了对大车、小车和吊钩的启停及运动控制,证实了该控制系统在桥式行车运动控制方面的精确性和稳定性满足了实际生产的需求。
6 结语
本文在多功能桥式行车实验台结构设计基础上,结合实验台拟实验功能,设计了一套基于三菱PLC的多功能桥式行车控制系统,主要取得以下成果:(1)对控制系统所需硬件进行选型设计;(2)设计了多功能模块的PLC 程序;(3)结合实验测试需求,设计了人机界面。并通过仿真模拟证实了该控制系统在桥式行车运动控制方面的精确性和稳定性,实现了对吊钩的启停及运动控制,满足了实际生产的需求。
猜你喜欢
装备制造技术(2021年1期)2021-05-21
快乐语文(2020年36期)2021-01-14
石材(2020年7期)2020-08-24
中国特种设备安全(2018年10期)2018-12-18
电子测试(2018年14期)2018-09-26
湖北文理学院学报(2017年2期)2017-04-16
启蒙(3-7岁)(2017年9期)2017-02-26
工业设计(2016年11期)2016-04-16
专用汽车(2016年4期)2016-03-01
设备管理与维修(2015年12期)2015-04-09
