基于线控四轮转向系统的车辆横向控制策略
2023-12-28 02:12马瑞兰郭唯浩姚俊明郭世永
青岛理工大学学报 2023年6期
马瑞兰,郭唯浩,姚俊明,郭世永,*
(1.青岛理工大学 机械与汽车工程学院,青岛 266525;2.歌尔科技有限公司,青岛 266100)
伴随着汽车技术的进步及汽车保有量的增加,汽车已经成为首选的出行工具。为满足消费者对车辆舒适性日益增长的需求,车辆的轮廓变得更长、更高,体型的增加导致汽车的灵活性降低[1],从而增加了驾驶负担。线控四轮转向技术作为一种前沿的底盘电控技术,可以兼顾车辆的舒适性和灵活性[2],目前已经被用于多款量产车型。其工作原理具体可以描述为当车辆低速行驶时,后轮转角与前轮转角相反,用以减小长轴距车辆在泊车工况下的转弯半径,达到降低驾驶员操纵负担的目的;在车辆高速行驶时,后轮转角与前轮转角转向相同,用于提高车辆的侧向稳定性,同时降低驾驶员的心理负担。但是传统的前轮转向系统将转向传动比设定为固定值,这很难满足不同车速下的需求,难以实现理想的横向运动状态响应特性。因此,线控四轮转向应运而生,被用来提高自动驾驶车辆在循迹控制过程中的跟踪精度和稳定性[3-6]。
为了提高自动驾驶车辆在循迹控制过程中的跟踪精度和稳定性,首先搭建线控四轮转向车辆模型[7],再结合Dugoff经验轮胎模型用来提高模型的精度、避免获取复杂的轮胎参数,然后分析横向状态参考模型得到饱和状态下的车辆横摆角速度。考虑到传感器成本高昂,难以直接测量侧向速度,另外车辆侧偏力因路面附着系数的变化及轮胎饱和等因素呈现出非线性,再加上路面扰动及模型参数时变特性的影响也会降低横向运动状态的跟踪性能,因此本文采用扩展卡尔曼滤波算法应对非线性的影响,融合改进积分法用以提高观测器的鲁棒性和观测精度,提出一种自适应滑模控制策略,采用横摆角速度误差和质心侧偏角误差定义滑模面,将前后轴侧偏刚度作为自适应参数,通过李雅普诺夫函数证明所提控制策略的稳定性,最终,设计考虑驾驶员反应时间和上臂肌肉力的驾驶员模型,在Carsim/Simulink联合仿真环境中搭建线控四轮转向控制策略。
1 模型建立
1.1 线控四轮转向车辆模型
如图1所示,线控四轮转向车辆模型的输入为前轮转角和后轮转角,模型状态为质心侧偏角和横摆角速度。车辆的侧向速度差分方程和横摆运动差分方程根据牛顿第二定律总结为[6]
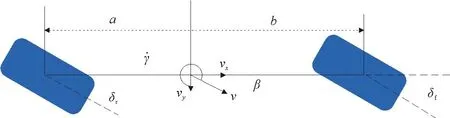
图1 线控四轮转向车辆模型
(1)
1.2 Dugoff轮胎模型
轮胎形状以及轮胎的纵向载荷决定轮胎在横向运动过程中的性能,Dugoff轮胎模型将用于描述轮胎侧向的动力学关系,其优势在于将轮胎模型综合到侧偏刚度中,提高模型保真度的同时避免复杂的参数调谐。图2描述了车辆前后轴侧偏力与侧偏角的关系。
具体可以解释为在非剧烈的驾驶运动中,轮胎为转向运动提供的侧向力较小,轮胎侧向力与轮胎侧偏角近似为线性关系;当轮胎进入饱和区,随着侧偏角的增加,侧向力不再上升。
前后轴的侧偏角变化如式(2)所示:

式中:αf,αr分别为前后轴侧偏角;δf,δr分别为前后轴输入转角;vx,vy分别为车辆质心处的纵向和横向车速。
Dugoff轮胎模型可以被描述为
Fy=-Cαf(λ)tanα
(3)

1.3 横向运动状态参考模型
理想的横向运动状态响应特性随车速变化,并且呈现不足转向的趋势,在固定车速下横摆角速度增益不随方向盘转角以及路面发生变化。理想的参考横摆角速度的稳态响应由二自由度模型推导[8]:
(4)
当车辆的转向运动过于剧烈,轮胎进入饱和,参考横摆角速度将被修改为
(5)
式中:g为重力加速度。
质心侧偏角的理想值为0:
βref=0
(6)
2 质心侧偏角观测器设计
现有的低成本车传感器很难准确地观测到质心侧偏角,质心侧偏角的观测算法一直是车辆动力学研究过程中的热点[9]。在观测器的设计过程中,主要包括两种策略,第1种是基于车辆动力学模型的观测器,主要是扩展/无迹卡尔曼滤波、H∞/H2鲁棒观测器、T-S模糊观测器及基于深度学习理论的观测器等[10];第2种是基于车辆运动学算法的观测器,此种观测器大多使用积分法或改进的算法。依赖车辆动力学算法的观测器很难获取复杂的车辆参数,并且车辆模型在轮胎饱和区呈现出高度的非线性,第2种观测器的缺点是传感器存在噪声及偏置,产生的累计误差难以控制[11]。本文采用扩展卡尔曼滤波算法用来克服车辆动力学的非线性问题,根据侧向加速度ay的幅值融合改进积分法的优点,避免大加速度下模型失真对观测结果的影响,观测器的构成如图3所示。
图3描述了扩展卡尔曼滤波算法及其与改进积分法的融合过程,在改进积分法的计算过程中,为了降低传感器信号中偏置和噪声的影响,需要加入阻尼系数对积分项进行修正:
(7)
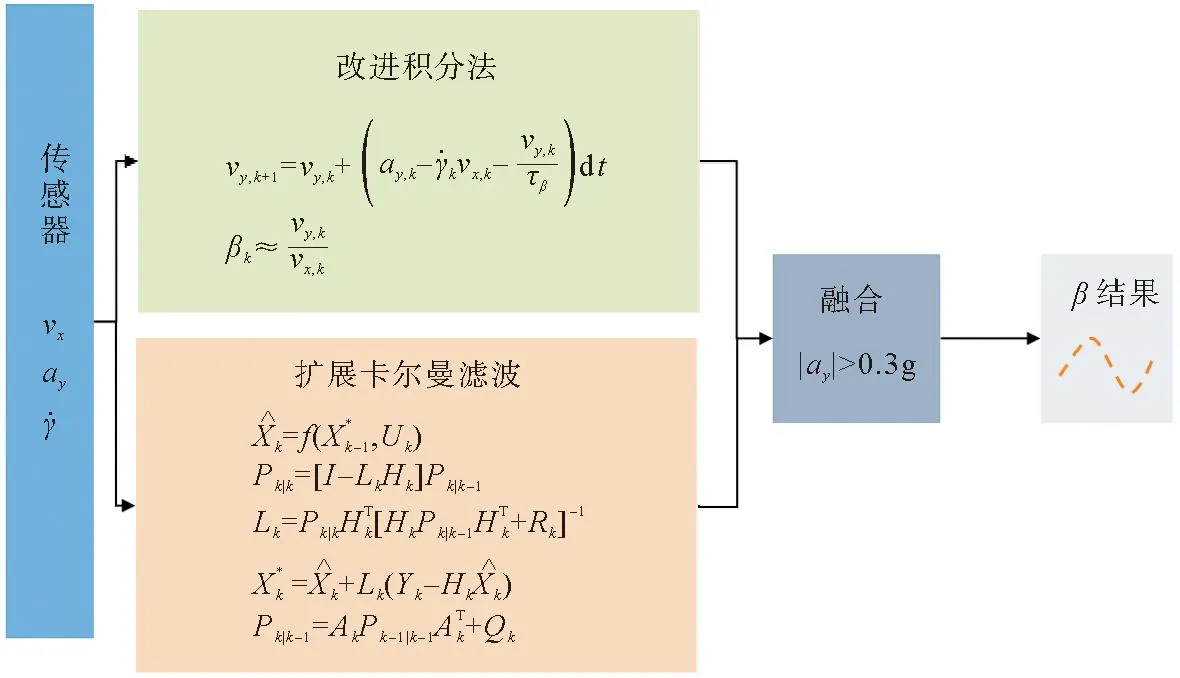
图3 质心侧偏角融合观测器
用于扩展卡尔曼滤波的车辆动力学模型经过离散化为
(8)
扩展卡尔曼滤波存在2个过程,第1个过程为基于车辆动力学模型在时间上的更新:
1) 预测状态更新
(9)
2) 预测协方差更新
(10)
第2个过程为基于传感器测量的更新:
1) 扩展卡尔曼滤波增益更新
(11)
2) 状态融合过程
(12)
3) 协方差更新
Pk|k=[I-LkHk]Pk|k-1
(13)

3 线控四轮转向横向控制器
等效的前后轴侧偏刚度因轮胎参数不同、转向过程载荷转移及轮胎饱和发生变化。在横向控制器的设计过程中,系统等效为线性二自由度模型,前后轴的侧偏刚度作为自适应参数:
(14)
式(14)中,系统的系数矩阵分别为
车辆横向控制中跟踪误差为
(15)

(16)

为了设计自适应律[13],定义侧偏刚度偏差为
(17)
(18)
侧偏刚度自适应律设计为
(19)
其中,系数矩阵的定义为
4 Carsim/Simulink仿真与验证
为验证所提出线控四轮转向算法的有效性,从神经肌肉力学的角度建立拟人化驾驶员模型。理想的参考模型需要合理的转角输入,因此结合Carsim车辆动力学模型,在Simulink搭建驾驶员模型、参考模型、质心侧偏角观测模型及控制器模型。

图4 驾驶员模型
4.1 驾驶员模型
驾驶员通过注视行为获得必要的信息过程被称为预瞄。预瞄模型的建立通常包括3个要素:驾驶员在行驶过程中的预瞄时间、基于预瞄偏差的控制器及考虑驾驶员神经肌肉反应的时间常数。图4为本文所采用的驾驶员预瞄模型,其中d为驾驶员的预瞄距离,ey为在驾驶过程中的横向偏差[14]。
驾驶员的预瞄时间在一定的取值范围,根据需求在本文中被设定为经验常数T=d/vx。横向跟踪偏差被定义为[15-16]
ey=y(t+T)-y(t)-dtanψ
(20)
式中:ψ为航向角;y(t),y(t+T)分别为当前时刻、预瞄时刻的横向坐标。
根据比例-积分-微分的反馈策略,驾驶员模型输出的转角为
(21)
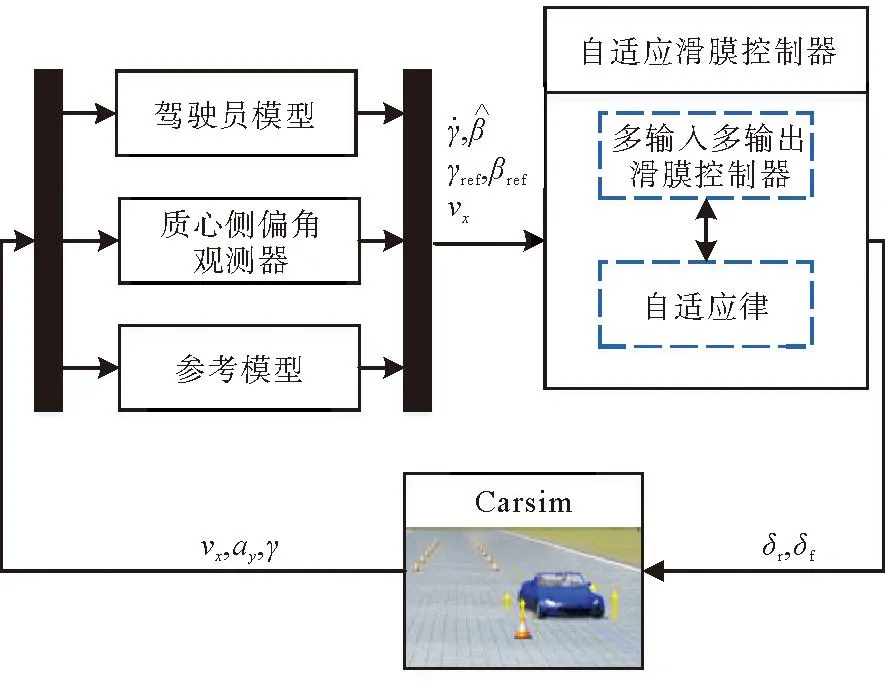
图5 Carsim/Simulink联合仿真
式中:Kp,Ki,Kd分别为反馈策略中的比例增益、积分增益及微分增益;t为误差积分的时间。
按照图5所示,进行Carsim/Simulink联合仿真。图中,输入量设置为vx,ay,γ:车辆的纵向车速、车辆的横向加速度、车辆的横摆角。
在仿真中采用延时传递函数和一阶惯性传递函数模拟驾驶员上臂的神经肌肉的反应特性:
(22)

4.2 联合仿真试验结果及分析
在Carsim软件中设定车辆动力学模型,车辆类型选择C-Class车辆,具体参数信息如表1所示。设计定速100 km/h的双移线仿真工况[17],在仿真过程对比地设计了无控制的前轮转向车辆。

表1 车辆参数

图6表明,线控四轮转向的质心侧偏角的峰值远小于无控制的前轮转向车辆,验证线控四轮转向系统可以提高横向运动的稳定性。控制效果如图7所示。
图7(b)及图7(c)清晰地展示了线控四轮转向车辆的横摆角速度实际值与参考值的误差较小,质心侧偏角趋近于理想的参考值0,验证了自适应滑模控制器可以提高横向运动状态的跟踪性能。同时,质心侧偏角实际值和观测值基本一致,表明本文所提出扩展卡尔曼滤波与改进积分法融合算法具有良好的观测性能。

图7 控制效果对比
由图7(a)可以看出,在线控四轮转向系统中前轴转角和后轴转角的方向相同,从而提高换道过程中车身的稳定性。
5 结论
本文所提出的扩展卡尔曼滤波与改进积分法融合的策略可以良好地观测出车辆的实时质心侧偏角值,Dugoff轮胎模型更准确描述了轮胎侧向力和侧偏角的关系,扩展卡尔曼滤波解决了对非线性模型最优估计的问题,在增大侧向加速度时切换为改进的积分法,避免了轮胎饱和导致模型失真的问题。
本文所提的自适应滑模控制器能够自适应前后轴刚度的变化,实现对横摆角速度和质心侧偏角的闭环控制并具有良好的控制效果,达到减小车辆横向运动中的轨迹跟踪偏差和降低质心侧偏角的峰值的目的。
猜你喜欢
汽车之友(2021年23期)2021-12-24
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
电子制作(2018年9期)2018-08-04
汽车工程师(2018年3期)2018-07-12
物理教学探讨(2018年1期)2018-02-13
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
电测与仪表(2015年19期)2015-04-09
电测与仪表(2014年11期)2014-04-04