多连杆机构在隐藏外开手柄中的设计应用
2024-01-12 07:45庞夏光亓欢宁谢崇早
汽车与驾驶维修(维修版) 2023年12期
庞夏光、亓欢宁、谢崇早
(上汽通用五菱汽车股份有限公司,柳州 545007)
0 引言
近年来,汽车技术迅猛发展,特别是新造车势力的加入,使得汽车的电动化、智能化成为重要趋势。汽车外开手柄是汽车的重要部件,是乘客首先看到和触摸到的零件,承载着车门开启和造型外观的双重要求。隐藏式外开手柄可以为用户提供更好的开门体验,正越来越多地被各新车型应用。但由于其属机电一体化产品,结构较传统手柄更为复杂,在设计及开发存在一定难度。
工业化发展迅猛的今天,自动化生产线上的送料机构、快速压力机、机器人步行机运动构、内燃机配气结构、装载机及挖掘机主臂等都基于多连杆机构展开应用。而汽车行业当中的雨刮、底盘悬架等都基于多连杆机构展开应用。目前具体到隐藏式手柄行业,同样可从连杆机构作为突破口,同时结合CAD、CAE 等辅助设计应用,把多连杆机构在平推外开手柄内部关键的伸缩功能拓展实现应用。
1 隐藏外开简介及常规结构形式
隐藏外开手柄的工作原理是,在不需要使用车门外开手柄时,整个外开手柄隐藏于车门中。这时外开手柄与车门外板曲面保持一致,犹如门板的一部分,感知好,能有效减小风阻和降低风噪。当需要使用手柄开启车门时,手柄可以伸出足够空间供乘员抓握,解锁并开启车门。目前,按手柄伸出时的运动形式,市场上的车型主要存在2 种类型的隐藏外开手柄,分别为旋出式外开手柄和平推式外开手柄。
1.1 旋出式外开手柄
旋出式隐藏外开手柄在解锁时,手柄会绕着旋转轴转动,在手柄后侧出现足够的空间供乘员抓握,拉动手柄解锁后开启车门(图1)。这种手柄结构相对简单,成本较低,缺点是旋出后供乘员抓握长度短,手柄与门板之前空间不足,人机操作较差。在旋出式隐藏外开手柄的结构中,手柄本身为一根杠杆,只需把内部增加转换的结构,即可把行程传递进而实现拉开解锁。

图1 旋出式隐藏外开手柄
1.2 平推式外开手柄
平推式隐藏外开手柄在解锁时,手柄以近似与门板平行的方式运动,完全伸出时与门板平行(图2)。这种手柄平出时更具科技感,为乘员提供更佳的人机空间以及操作体验。但手柄一般要靠复杂的连杆机构实现基本功能,内部空间也对结构复杂的布置带来较大的挑战。因此,平推结构总体成本以及对整体设计开发要求较高。

图2 平推式隐藏外开手柄
2 基本概念性功能原理
如果把实现手柄的伸出、缩回作为基本概念性功能,那么平推式隐藏外开手柄的连杆机构可以以常规平行四边形原理做参考(图3)。手柄作为其中一连杆,限制其只能伸缩运动(图3 中的上下运动),那么只需要有伸缩机构给手柄对向的连杆(绿色)提供动力做水平的移动。如另外两根连杆长度差异,表现的运动也产生差异。

图3 平推式隐藏外开手柄基本结构示意图
2.1 功能拓展原理
平推式隐藏外开手柄一般工作过程共分为3 个位置。第1 个位置是隐藏位置(即图3a 所示位置),该位置为隐藏手柄未动作时的状态,手柄与外板平齐。第2 个位置为平推展开位置(即图3b所示位置),该位置为手柄接收到相关信号,通过执行器的推杆伸出,驱动手柄内部连杆机构运动,转换成手柄趋向平推伸出,使手柄展开到与门外板平行位置,提供足够空间供乘员抓握。第3 个位置为解锁位置,该位置在外力作用下,拉动手柄进行旋转运动。
2.1.1 功能拓展示例1
基于以上基本需求,搭建以A、B、C、D 为轴点组成的一个基本四连杆结构(即四边形)。把连杆AB 拓展弯曲延伸至E 点,E 点设为固定在基座上的转轴;把连杆AC 拓展延伸至F 点, F 点也设为固定转轴。可以看出,A 和F 这2 个转轴位置限定后,如AB 连杆绕E 点运动时会带动整个A、B、C、D 组成的 4 连杆机构进行运动(图4a)。
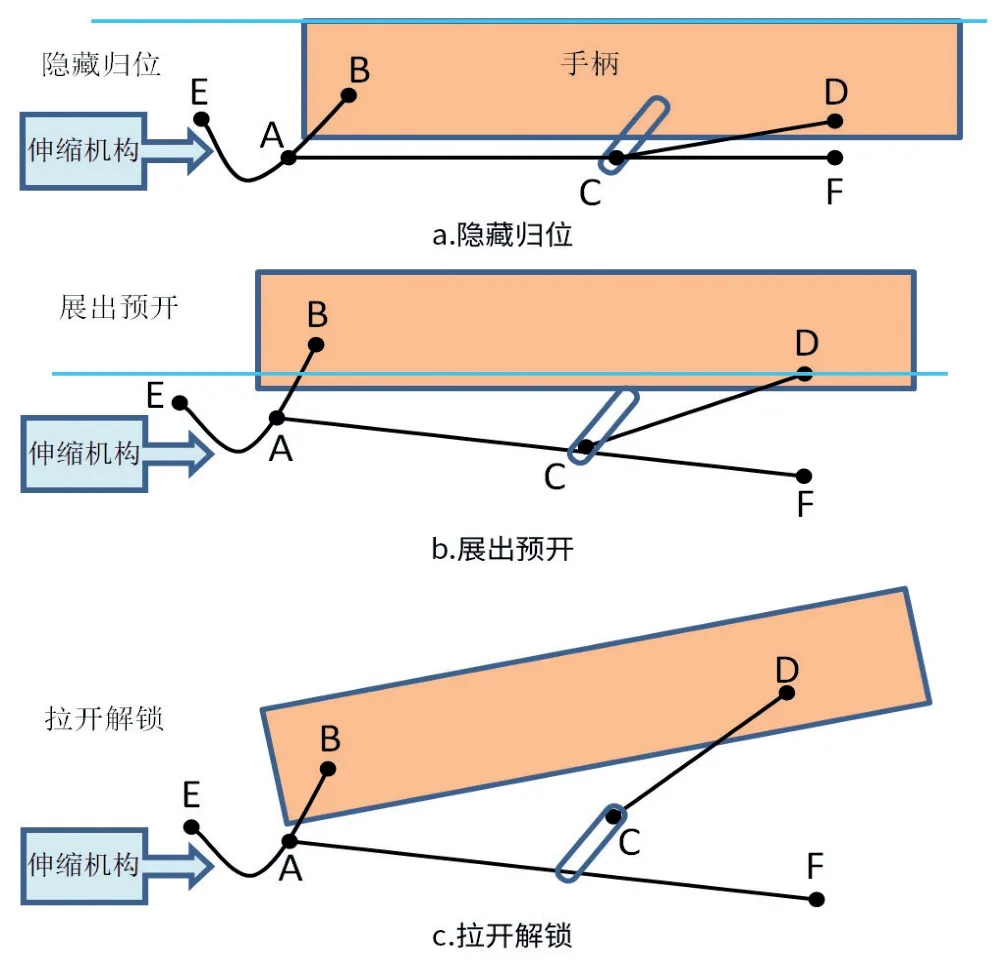
图4 平推式隐藏外开手柄功能拓展结构(示例1)
具体可以设置伸缩机构提供输出力,作用于BE 连杆的弯曲段(AE),使其产生一定范围的转动,从理论上可以实现BD 连杆的趋向平出往上的运动。BD 连杆设定为手握处的手柄(图4b)。同时,如在AF 连杆上的C 点设置导槽,CD 连杆中C 点可在除了做旋转运动还能做在导槽中做滑动。
平出完成后,AB 连杆旋转到达最大位置不能再动,拉动BD手柄解锁时,手柄BD 绕B 点进行旋转,此时C、D 点(手柄尾端)翘起。拉动CD 连杆,CD 连杆在导槽中滑动,把D 点(手柄尾端)翘起(图4c),理论上通过结构上的设计,把行程传递给门锁外开拉索,进而实现解锁。这个过程同传统车门把手解锁的效果类似。
2.1.2 功能拓展示例2
以同等的基本需求,搭建A、B、C、D 为轴点组成一个基本四连杆,把连杆AB 拓展弯曲延伸至E。E 点设为固定在基座的转轴,D 点也设为固定在基座的转轴,CD 连杆绕D 点旋转。把连杆AC 拓展增加滑槽,FG 连杆中的F 点在滑槽中设为可转动及滑动,BG 设为其中的连杆。可以看出,E 和D 这2 个转轴位置限定后,如AB 连杆绕E 点运动时,会带动整个A、B、C、D 及G 组成的5 连杆机构进行运动(图5)。
具体可以设置伸缩机构提供输出力,作用于BE 连杆的弯曲段(AE),使其产生一定范围的转动,从理论上可以实现BG 连杆趋向平出往上的运动。BG 连杆设定为手握处的手柄。同时,FG 连杆上的F 点设置为只要有向上的力作用,都可在导槽中滑动,同时还能随整个连杆机构做旋转运动。设置伸缩机构提供输出力,作用于BE 连杆的弯曲段(AE),使其产生一定范围的转动,从理论上同样可以实现BG 手柄连杆趋向平出往上的运动。
平出完成后,AB 连杆旋转到达最大位置不能再动。拉动BD手柄解锁时,手柄BG 绕B 点进行旋转,G 点(手柄尾端)翘起。拉动BG 连杆,FG 连杆的F 点在导槽中滑动,理论上通过结构上的设计,把行程传递给门锁外开拉索,进而实现解锁。这个过程理论上也能实现传统手柄一样开锁的效果。
3 多连杆机构设计及校核
3.1 设计基本参数确定及概念连杆运动模型建立
以上所述仅为很初级的多连杆展开概念理论。实际在隐藏外开手柄设计中,还要结合目标需求及边界条件进行约束,确定关键的基本目标需求参数,再进行下一步工作。目标需求参数主要有以下几个:①推出手握人机空间需求,手柄整体尺寸;②手柄一段展出距离,手柄二段拉出距离;③拉开解锁力、输出解锁行程[1];④伸缩机构的推力、推出行程;⑤Y 向布置空间[2];⑥耐惯性力校核[3]。
基于主要参数作为限制后,要完成高效、可靠的设计,通常都在如UG、Solid Works 等设计软件中进行初版运动仿真模型建立,确认运动模型可实现性及各个连杆的受力情况。这个过程需要带参数不断修改调整连杆长度尺寸以及转轴位置,从而确认各机构的初始值,并且符合基本参数要求(图6)。

图6 连杆运动概念模型建立
3.2 配合件与连杆布置设计
根据在设计软件里建立的概念运动模型,把最终要实现运动功能匹配件的各项细节零件进行初步布置。主要涉及的零件有底座、伸缩机构(执行器)、手柄主体、连杆、旋转轴、推块和弹簧等。连杆在设计并联机构中应具有刚度大、响应快和精度高等优点[4]。将布置进一步细化,并确认运动模型的可实现性,这个过程需要带参数不断修改调整连杆长度尺寸、转轴位置,把各机构进一步确认最优值(图7)。

图7 平推式隐藏外开手柄主要零件配合布置
3.3 连杆机构细化设计
(1)连杆机构中涉及的几根轴要平行;连杆上有通孔,要与轴等其他件受力。在保证连杆厚度的同时做大加筋条予以加强,然后再进行减料。另外,确定主壁厚,要设计出凸边并增加加强筋予以加强(图8)。
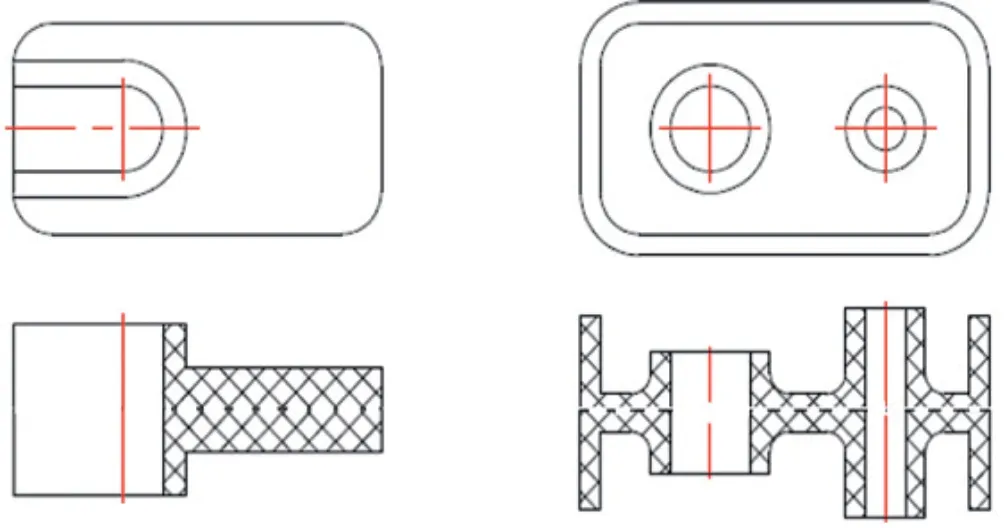
图8 连杆机构细化示意图
(2)为了保证连杆的强度,其在运动包络占用空间最小,以及单件具有足够的扭转刚度,连杆除了厚度尺寸尽可能做大,宽度尺寸也在保证空间需求满足的情况下尽量做大,以保证轴强度及轴与连杆配合的强度。
(3)主连杆中间端设计滑动连杆弧形导槽,保证与滑动轴的配合间隙。滑动轴配合导槽底部孔设计回位缓冲胶,能实现装配的情况下尽量把连杆上做成一体注塑转轴。
3.4 连杆机构与其他零件细化设计
隐藏手柄结构如图9 所示,还需要对相关的底座、执行器、手柄主体、连杆机构、旋转轴、推块和弹簧等部件进行进一步的细化设计,以更合理地匹配连杆机构。

图9 平推式隐藏外开手柄结构示意图
4 相关CAE 分析校核
产品开发环节中的CAE 分析在阶段性理论求证中也尤其重要。CAE 分析可以最大限度地模拟实际工况,在理论层面校核概念原理以及结构设计。其中涉及的相关CAE 分析内容通常有运动仿真、模态和受力等。其中,运动仿真的目的是为校核机构的实现可行性、各运动件之间的安全间隙以及干涉检查。模态主要分析整个机构运动的振动属性。另外,开启力校核是车门外把手系统设计布置的一个关键控制点,也是对车门外把手结构、弹簧选择和基座平衡块等细分零件的一个综合考察,在此不做展开。受力部分应采用强度较高的材料[5]。
主基座与连杆机构比较关键的性能在CAE 分析软件中的分析情况如下。
4.1 静力学分析校核
基座及连杆机构静力学分析校核如图10 所示。CAE 分析结果显示,在100 N 推出阻力工况下,连杆最大位移为0.554 mm,出现在连杆末端位置(目标值为5.000 mm)。

图10 100 N 推出阻力工况静力学分析校核
4.2 受力形变校核
连杆机构受力形变校核如图11 所示。CAE 分析结果显示,连杆机构受Y 方向1 000 N 拉力作用时, 最大变形产生位移12.600 mm,出现在连杆靠近手柄末端处(目标值为13.000 mm)。

图11 连杆机构受Y 向破坏力校核
4.3 应力校核
连杆机构应力校核如图12 所示。CAE 分析结果显示,连杆机构受Y 方向1 000 N 拉力作用时,最大应力为280.0 MPa,出现在连杆的销孔拐角处(目标值为300.0 MPa)。
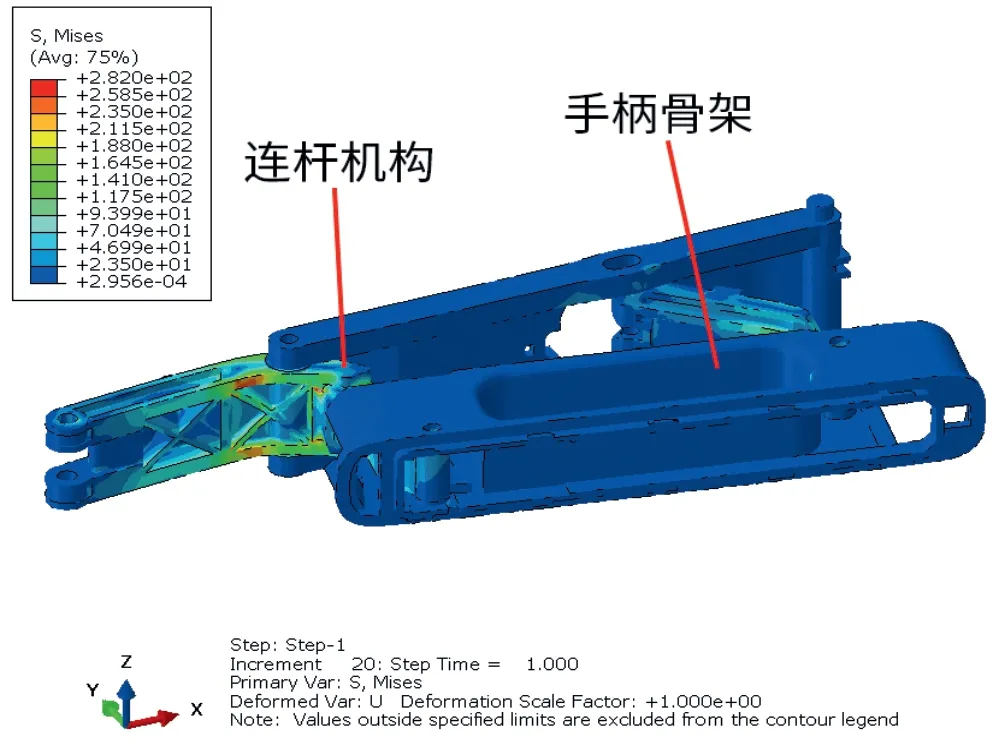
图12 连杆机构受Y 向受力产生内部应力校核
结合过往行业内开发的经验对比分析结果,连杆结构方案应用于隐藏把手,其性能可达到常规把手性能的80%左右。因此,在科技化智能化的大背景下,平推式隐藏外开手柄成为造车新势力主推结构。
4 结束语
隐藏手柄作为一种汽车新兴技术,已经被越来越多的主机厂应用。随着汽车设计水平与生产工艺的不断提升,隐藏手柄逐渐成为汽车特别是新能源汽车的主流应用手柄,因此也给设计开闭件的技术人员提出了此方面技术储备的要求及研究课题。
本文基于多连杆结构作为基础技术的切入点,并结合采用CAD、CAE 设计软件,对隐藏外开手柄在实现关键的伸缩功能方面开展了技术研究和开发应用,使设计开发效率及产品可靠性进一步提升。希望通过本文抛砖引玉,结合具体实践,为广大整车及零部件从事人员提供一些参考。
猜你喜欢
大电机技术(2022年5期)2022-11-17
上海大中型电机(2021年1期)2021-06-09
装备制造技术(2020年11期)2021-01-26
中国交通信息化(2020年12期)2020-02-06
山东冶金(2019年2期)2019-05-11
电子制作(2018年11期)2018-08-04
电脑爱好者(2016年23期)2017-01-05
科普童话·百科探秘(2015年5期)2015-05-26
小朋友·快乐手工(2015年3期)2015-04-10
水电站机电技术(2014年4期)2014-10-13