汽车-两轮车碰撞事故重建与分析研究
2024-01-12 07:45宋英武陈君谢鹏鹏李世强邓诗涛张辉力
汽车与驾驶维修(维修版) 2023年12期
宋英武、陈君、谢鹏鹏、李世强、邓诗涛、张辉力
(1.东风柳州汽车有限公司,柳州 545500;2.柳州市交通警察支队车辆管理所,柳州 545500;3.广西科技大学,柳州 545616)
0 引言
截止到2022 年底,我国两轮车的保有量就突破3.5 亿辆[1]。2019 年我国两轮车骑行者的受伤、死亡人数分别占总受伤人数和总死亡人数的43%和37%。着眼于交通安全课题,事故总量得到有效控制,非机动车交通事故的形势仍很严峻,是影响社会稳定的一大因子。两轮车由于其独特的交通和安全防护属性,给碰撞事故调查分析和责任划分带来很大难度。因此,利用事故重现技术是进行事故成因分析的重要参考手段。
Wojciech 等基于一则汽车-汽车的碰撞实例,通过概率论分析的方法,结果表明车辆的碰撞速度的概率分布近似于正态分布[2];Untaroiu 等在车-人碰撞中,将碰撞速度、碰撞角度、人在车内的相对位置头部朝向、行人的步行姿势以及儿童奔跑姿势设置为设计变量[3]。国内在事故分析大多还停留在交警人工判责阶段,在事故再现上的研究起步晚,很多研究才处于发展阶段,基于事故建立的数据库仍不足够完善,关键环节技术掌握还不足够。陶孙文等提出基于PC-Crash 逆向分步再现仿真方法,将事故划分为不同的阶段,利用一致性判断再现过程的合理性[4];邹铁方基于PC-Crash 中车辆模型提出车辆侧滑事故分步再现方法[5]。王岩基于PC-Crash 数值仿真平台,建立了车辆、电动自行车和摩托车驾驶者的碰撞动力学模型,并研究了各种碰撞条件下自行车骑手的头部和臀部受伤情况,为电动自行车事故重建和电动自行车骑手的防护提供了理论基础[6]。
本文研究主要利用理论分析和仿真的方法,通过事故深度数据采集和事故重建技术,对碰撞过程进行重现,分析碰撞过程中机动车、两轮车和驾驶人三者的运动状态,探究碰撞事故的成因。这为提出保护汽车和两轮车权益和安全的政策法规提供理论依据。
1 汽车-两轮车事故调查分析
1.1 基于视频法推算行驶车速
根据交通事故现场的监控视频截图,通过帧间时间差法,得出车辆前后轴通过参照物A(地面标线)、两轮车通过斑马线B1和B2 的时间差(图1)。在已知小汽车的轴距、斑马线参数数据,进而分析推算小汽车的行驶车速。

图1 车速推算关键帧数图
已知帧速率为23.6 fps(fps,每秒帧数),根据速度、时间和距离之间的基本关系,小汽车的行驶速度v计算如下:
式中:L为小汽车轴距的数值,单位m;t为车辆前后轴通过参照物A 的时间差数值,单位s。
两轮车行驶车速v2计算如下:
式中:L2为斑马线宽与斑马线距之和数值,单位m;t2为两轮车通过斑马线B1 和B2 的时间差数值,单位s。
1.2 汽车-两轮车事故深度数据采集
1.2.1 事故信息描述
事故日期/环境/位置(Date/Surrounding/Location):2017/06/20,14:50,市区,十字路口,日光,干燥。
事故描述(Accident Description):机动车与摩托车碰撞事故(图2)。2017 年6 月20 日14:50,丰田卡罗拉沿道路最里侧车道行驶,意图在前方虚线处左转;摩托车沿对向非机动车道超速行驶。当卡罗拉左转进入对向非机动车道时,与摩托车发生碰撞,摩托车前部撞击卡罗拉的右前角。由于机非隔离的植被遮挡,碰撞前双方并未观察到对方。碰撞后由于惯性,摩托车驾驶员的身体从挡风玻璃前翻转360°后,双脚落地后向后倒地。

图2 视频监控获取的事故现场图
事故类型(Accident type):非机动车道驶来的两轮车与正在左转的车辆在交叉口处发生碰撞。
1.2.2 事故成因初步分析
责任双方损伤情况:两轮车驾驶人严重受伤,没有头盔;汽车驾驶人没有受伤,未使用安全带。经现场调查取证与路口监控视频分析判断后,造成本次事故的根本原因包括以下3 条:①两轮车违反交通规则(超速,道路优先);②两轮车驾驶员视野受绿化带影响;③汽车驾驶员视野受绿化带影响。事故责任初步划分为非机动车使用错误的车道或非法使用道路。
1.3 汽车-两轮车事故深度分析
首先建立碰撞仿真模型。车辆建模上需要修改的参数界面包括车辆生产时的基本数据参数和现场测量得到的事故车辆的外形尺寸。由于两轮车-驾驶员质量设置也在很大程度上影响仿真效果,经查阅资料,两轮车系统质量由134 kg 两轮车整备质量以及75 kg 人体质量组成,共计209 kg;车身高度和车身宽度为驾驶员处于驾驶状态时测量所得。具体设置如表1 所示。

表1 汽车与两轮车基本参数表
然后,基于事故现场航拍图,根据tree、house 和标线等模块填充而成的事故现场图,建立碰撞事故仿真模型(图3)。

图3 事故现场仿真模型
最后,根据上述计算所得车辆初始速度,输入车辆初始运动状态参数和车辆减速度。
2 分析结果及讨论
2.1 仿真过程对比分析
如图4 所示,整个碰撞过程共分为4 个阶段。在碰撞阶段,汽车与两轮车开始接触时刻;飞行阶段为非机动车驾驶员在碰撞后,由于自身惯性离开两轮车向外翻滚过程;落地阶段为两轮车驾驶员与地面开始接触过程;滑移阶段为两轮车驾驶员与路面发生滑动摩擦损伤阶段。根据视频监控与仿真结果的仿真对比,结果显示:汽车-两轮的碰撞点、两轮车驾驶员飞行状态、落地位置以及三者终止位置的仿真状态与真实事故状态较好吻合,可以证明仿真过程的可靠性。
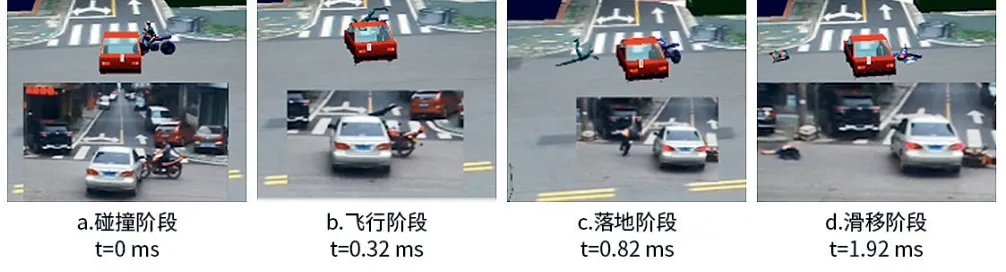
图4 仿真视频动画与监控视频画面对比
2.2 人体伤情分析
在事故伤亡分析中,主要通过衡量负载与人体可以抵御伤害的阈值之间的关系来判断的。在汽车与两轮车的交通事故中,两轮车的驾驶员在抛射过程中头部是最容易受伤部位。下面将从碰撞阶段、飞行阶段和滑移阶段分析两轮车驾驶员的头部受力和加速度的大小。
2.2.1 头部受力曲线
汽车-两轮车碰撞事故中两轮车驾驶员头部所受合成外力如图5 所示。可以看出,在碰撞阶段,两轮车受到汽车的阻挡速度迅速降低,骑行者由于惯性保持原有的运动状态,腿部和躯干绕着汽车侧面绕转。在飞行阶段,骑行者的头部先在碰撞阶段的基础上完成绕转行为,此时头部先与相对运动的汽车右侧挡风玻璃发生,所受合成力为1827.34 N,即为图5 中的第一个峰值。紧接着身体以头这个碰撞点做旋转运动,双脚落地,躯干头部触地,受合成力为2970.83 N,为图5 中的第二峰值。滑移阶段存在一小头部受力峰值,主要分析原因是头部落地反弹后与地面的第二次碰撞。

图5 两轮车驾驶员头部合成受力
2.2.2 头部加速度曲线
驾驶员头部的加速度的研究重点在于合成加速度和角加速度,这两者峰值在很大程度上会导致交通事故挥鞭伤的出现。图6 所示为汽车-两轮车碰撞事故中,两轮车驾驶员头部合成加速度和角加速度曲线图。
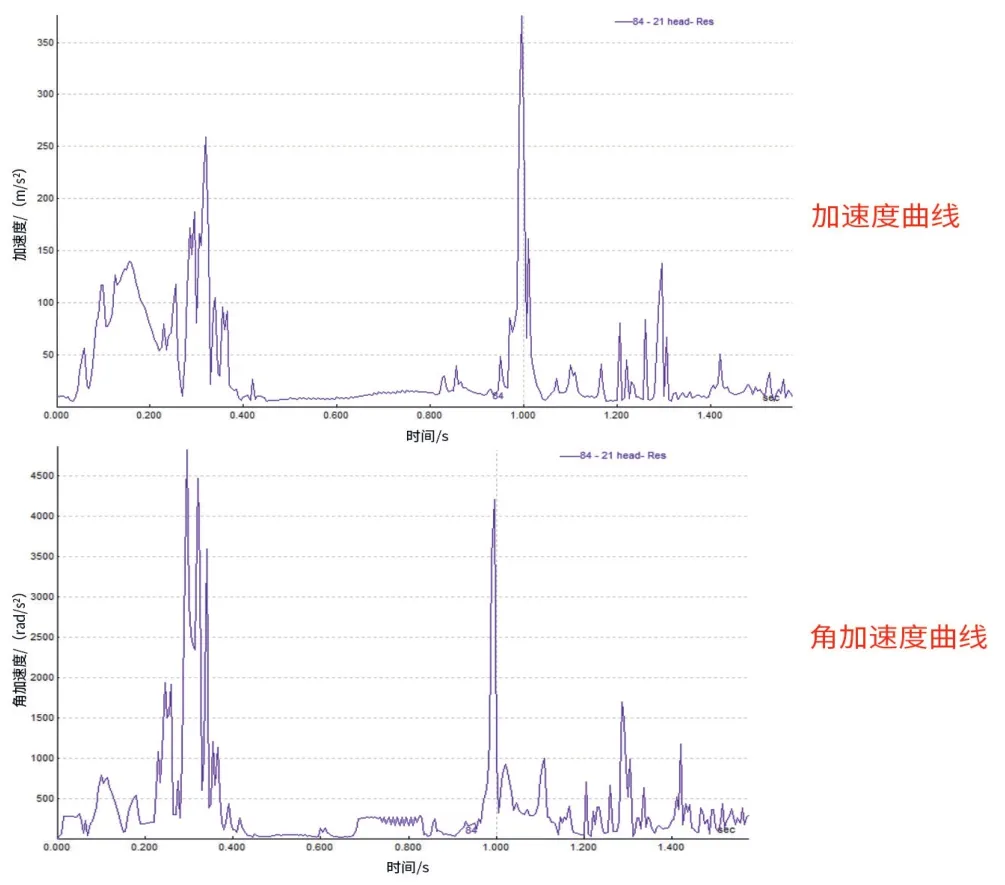
图6 两轮车驾驶员头部合成加速度、角加速度曲线
根据牛顿定律,加速度和所受外力存在定量关系,头部受力中分析的峰值原因也是合成加速度、角加速度的成因。需要特别说明的是,曲线中两轮车驾驶员头部碰撞汽车挡风玻璃前出现了一个峰值,其原因是两轮车及驾驶员受到汽车的阻挡速度迅速降低,此时驾驶员还未进入飞行阶段,头部因为惯性的存在而产生碰撞前的峰值。
2.3 车辆状态分析
汽车的运行状态在责任划分中有着很大的参考价值,影响车辆运行状态的制动和碰撞力,可由外在的位移-速度、加速度曲线反应出来。
本文中,汽车在转弯处行驶速度慢,在制动因素设置接近100% 的条件下,车辆行驶速度随着车辆制动距离平缓变化,0.75 m 的距离内便完成汽车的制动行为。经过分析,波动位置主要是由猛踩制动踏板行为导致。
图7 所示为交通事故中汽车的主要运动状态图。可以看出,在制动因素设置接近100%的条件下,紧急制动时汽车整体运动状态呈现负值加速度。汽车侧面与两轮车存在两次碰撞行为,分别是与两轮车前轮和两轮车侧面的碰撞。首次碰撞,两轮车速度快,造成汽车侧面加速度峰值的出现;二次碰撞,车速降低,碰撞面为两轮车的侧面,峰值大小要比第一次小。汽车右前角有明显的损伤,原因是两轮车车辆施加的外力,这外力在y 轴上的分力让汽车有小幅度在铅锤方向的正值加速度。

图7 汽车位移-速度关系、加速度曲线图
3 结束语
本文研究结果表明,通过对比仿真与监控中各事故参与方的碰撞位置以及两轮车驾驶员飞行落地滑移阶段的轨迹和最终位置,事故仿真得到的响应结果与实际碰撞过程接近,验证了重建模型的可靠性。基于视频法推算的汽车行驶车速为11.04 km/h,两轮车行驶车速为44.60 km/h,两者车速与仿真时给出的车速误差在5%以内,验证了该方法的可行性。
本文通过对事故3 个过程的分析以及事故深度调查的方法,建立了汽车-两轮车碰撞仿真模型,仿真结果与实际情况比较吻合。基于实例的深度调查,保证了事故重建过程的效率性以及结果的可靠性。在某种意义上,降低了监控等基础设施不够完善路段责任划分难度,同时也为深入研究提供了可靠的数据支撑。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年4期)2022-03-07
基层中医药(2021年1期)2021-07-22
军事文摘(2020年22期)2021-01-04
汽车维护与修理(2018年1期)2018-04-04
公民与法治(2016年4期)2016-05-17
天津医科大学学报(2015年2期)2015-12-22
汽车维护与修理(2015年5期)2015-02-28
警察技术(2015年6期)2015-02-27
警察技术(2013年1期)2013-03-20