基于STPA 方法的无人机空战态势分析与战术优化
2024-01-26 03:18魏潇龙甘旭升
指挥与控制学报 2023年6期
刘 影 魏潇龙 屈 虹 甘旭升
无人作战飞机必然是未来空战场上的主要作战力量,实现其空战决策的自主与智能化是当今世界各军事强国争相研究的主要方向[1].但空战机动的决策必须要以空中态势的准确判断为基础,若态势判断产生偏差,或准确率不高,则必然导致决策准确性降低,在连续的决策序列中逐渐失去有利态势,并被敌机击落.随着航空武器弹药、机载电子干扰设备、航空通信技术性能的不断提升,UAV 与其他武器平台的协同作战样式变得更为丰富,但这也进一步加剧了态势的判断难度,使得自主决策技术的实现变得更为困难[2].
文献[3-4]在对UAV 空战机动决策展开研究过程中,对态势的分析都采用了最为基础的相对位置判别方法,即依据相对距离、角度、高度、速度来判断敌我双方之间的态势关系,并以此作出目标分配与机动决策,但未对战术优化进行进一步分析.文献[5]使用灰主成分指标约简模型构建空战目标威胁评估模型,可支持空战的快速决策,但评估对象仅局限于目标分析,对于战术效果的影响有限.文献[6-7]基于犹豫模糊集(hesitant fuzzy set,HFS)理论对空战态势因子进行评估排序,但该方法对战术的优化未展开进一步研究.文献[8]提出一种使用神经网络学习的方法实现空战态势的自动评估,但该类方法会受样本条件制约,且多机条件下的学习量会呈爆炸式增长.文献[9]对UAV 空战态势评估问题进行了综述,认为主要包括基于空战数据的态势时序参数分割聚类、态势函数权重优化、空战态势评估模型建立等问题,但该研究并没有开展具体的定量研究和仿真验证.文献[10]基于系统理论混合式分析(systems theoretic process analysis -traffic organization and perturbation analyzer,STPA-TOPAZ)方法对UAV 低空运行条件下的风险状况展开评估,可用于优化UAV 之间的自主避让机动决策性能,具有一定参考价值.文献[11]则使用STPA 方法对空中加油过程展开建模分析,通过控制过程建模实现了安全性的优化.
从国内外有关UAV 空战态势评估的研究来看,重点关注内容为各类评价因子的排序以及如何为后续的决策提供信息支持,实际上是一种态势信息的自动认知,但仍未建立起滚动优化的评估体系.在安全评估领域,尤其关注风险的评估与优化过程,注重回路的形成与迭代更新过程.本文借鉴经典的安全分析模型,对UAV 空战机动控制过程展开建模,通过对敌我态势的分析与战术虚拟验证不断优化自主机动决策技术,实现空战能力的提升.
1 空战基本态势分析
无人机空战过程中,对敌机的态势主要来自于两个方面: 一是通过体系雷达组网获取敌机目标,再由数据链发送至无人机;二是通过无人机自身携带的火控雷达获取敌机位置信息[12].但在无预警机作为信息支援的情况下,通常只能通过机载火控雷达实现对敌机的锁定和攻击.因此,敌我双方的火控雷达覆盖状况就成为态势判断的依据.根据以往态势判断的基本方法,可将判断要素划分为相对高度、相对速度、相对角度以及距离,且所有要素都并非是正相关,优势到达一定极值以后则又会迎来下降[9].特别是在中远距空战过程中,高度优势会被不断弱化,只有进入近距缠斗中,才会体现出高度优势的作用.相对速度会影响武器的攻击命中率,相对速度越小,越利于导弹命中.因此,在攻击时应当尽量缩小相对速度,在逃逸时应当加大相对速度.主要考虑中远距条件下的空战对抗,对态势的分析主要基于相对角度和距离.若将我方UAV 记为红方,敌方UAV 记为蓝方,则红蓝方之间的空战态势可分为4 类,如图1 所示.

图1 UAV 空战态势Fig.1 UAV air combat situation
红方攻击优势是指蓝方已在红方火控雷达照射范围内,但由于武器弹药对敌机的命中率并非百分之百,因此,蓝方仍有摆脱劣势的可能;攻击均势是指红方与蓝方均在对方的火控雷达照射之下,双方都有可能被对方击落;机动均势是指双方火控雷达都还未覆盖对方,只能通过体系雷达获取敌机位置,无法对对方实施攻击;红方逃逸劣势是指红方已在蓝方火控雷达照射之下,且未用火控雷达锁定对方,有可能被蓝方击落.假设火控雷达波束呈圆锥形分布,距离越近,辐射越强,攻击命中率也越高,命中概率可表示为:
式中,pr为红方UAV 对蓝方UAV 的攻击命中概率;b 为常数;d 为红蓝方之间的距离;σr根据红蓝方相对角和距离变化.σr的计算方法为:
式中,θrb为红方与蓝方之间的相对角;θbr为蓝方与红方之间的相对角;drf、dbf分别为红蓝方火控雷达作用距离;θrf、θrb分别为红蓝方火控雷达照射角度范围;红蓝方相对角如图2 所示.

图2 红蓝方角度关系Fig.2 Angle relationship between the red side and the blue side
在红蓝方刚交战之初,双方都是处于一种机动均势状态,都希望通过一定的机动过程使敌方陷入逃逸劣势.但由于红蓝方之间持续性的机动博弈过程,态势并不会总往我方希望的方向发展,因为决策技术的缺陷、目标的丢失、机动性能的劣势、电子干扰等原因,必然会有其中一方陷入逃逸劣势或同时陷入攻击均势.电子干扰对命中概率的作用可表示为:
式中,K 为常数.根据STPA 分析方法步骤[13],将红方陷入逃逸均势或攻击均势定义为一种系统级危险,可能导致的系统级危害分为: 飞机被击落(D-1);逃逸成功,但敌方获得制空权,任务失败(D-2);双方维持均势,都被击落或都未被击落,任务失败(D-3).系统级危险与系统级危害之间的关系如表1 所示.
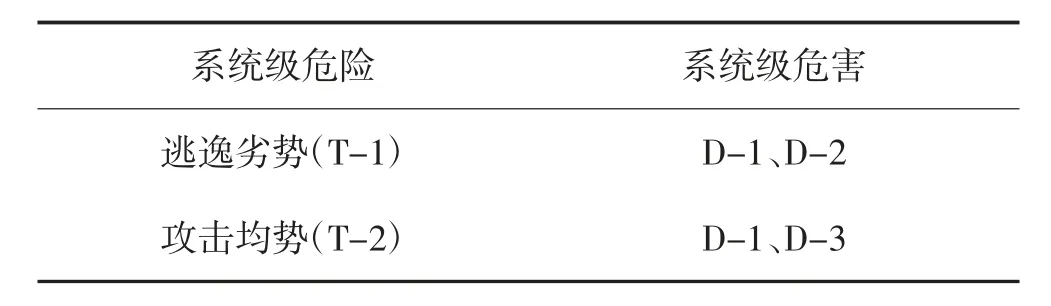
表1 系统级危险与系统级危害关系Table 1 Relationship between system level hazard and system level hazard
通过追溯系统级危险的成因,则可以进一步为避免陷入态势劣势提供优化策略.
2 空战机动控制过程分析
为能够系统追溯陷入态势被动的原因,需要构建UAV 空战态势感知和机动决策控制过程模型,对各种陷入态势劣势的原因与过程进行梳理,为最终原因的查找识别提供支撑.
2.1 机动决策控制过程建模
UAV 在接敌作战过程中,要想作出正确的机动动作,首先应当获取准确的敌机空中位置,根据历史航迹信息预测敌机的当前状态,判断威胁区域.根据威胁区域规划最佳的机动策略,并发出机动控制指令.威胁区域主要指敌机的火控雷达作用区域,UAV作出的空战战术机动的目的就在于规避敌机的火控雷达照射范围,积极锁定敌机.同时,UAV 出于自身防护目的会加装电子干扰吊舱,降低敌方攻击命中概率,为自身争取机动时间.电子干扰辐射范围主要集中在两侧,避免侧向机动过程中被敌方锁定攻击.敌机在电子干扰作用下获取目标精度会下降,假设获取目标误差呈正态分布,且距离越近,误差越大.UAV 可以积极利用电子干扰掩护展开侧向机动,直至构成有利态势.电子干扰作用下的目标位置获取可表示为:
UAV 机动决策控制过程模型如图3 所示.

图3 UAV 空战机动控制模型Fig.3 UAV air combat maneuver control model
可以看出,UAV 空战机动的态势优势占据首先需要通过威胁区域的规避,但威胁区域的规避则需要基于威胁态势的判断.在敌机电子干扰作用下,态势的判断会受影响,有可能误入威胁区.又由于命中概率与距离有关,对于高风险威胁区域的判断又会成为取胜的关键.
2.2 空战机动威胁分析
对于中远距空战而言,UAV 的机动动作主要有3 类: 左转、右转及直行.但为了态势的抢占,又可将机动控制按照战术目的划分为: 态势争夺机动(C-1)、威胁避让机动(C-2)、追击机动(C-3).会引发态势丢失,导致被敌机击落的行为定义为不安全行为,则可归纳如表2 所示.
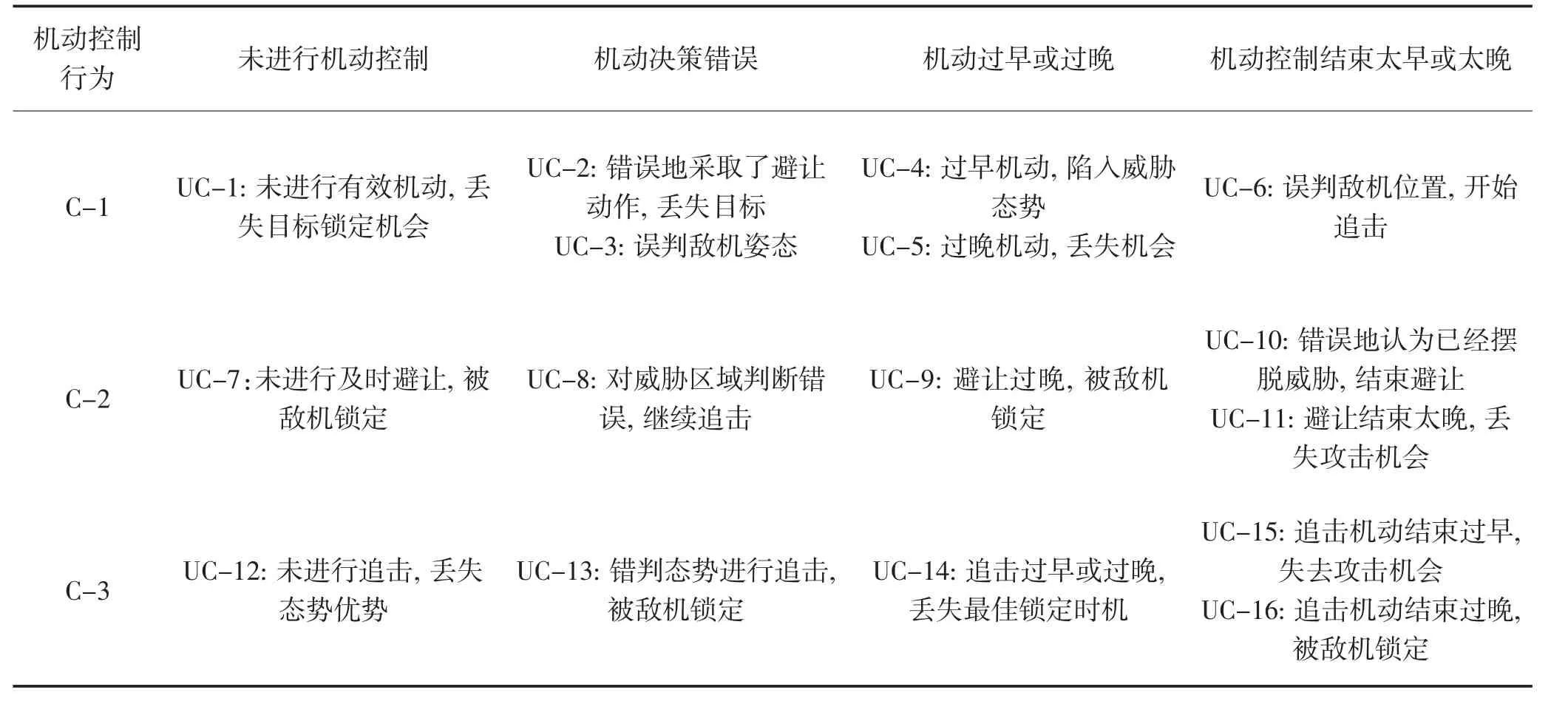
表2 UAV 空战过程不安全行为Table 2 Unsafe behavior of UAV air combat process
根据分析形成的空战过程不安全行为,可进一步分析造成这一行为致因因素,为UAV 空战性能的优化提供目标,致因因素的分析结合图3 和表2 进行,分析结果如表3 所示.

表3 UAV 空战对抗失利致因因素Table 3 Factors causing failure of UAV air combat confrontation
2.3 空战能力提升策略分析
根据分析的UAV 空战对抗失利原因,可以梳理对应的优化措施,提升空战对抗的胜率.但UAV 系统基于STPA 方法的优化与传统有人机领域不同,有人机的优化可从系统级危险、不安全行为和致因因素3 个方面着手[11],但无人机自主空战能力的优化则更关注系统性能的提升和战术的改进.因此,针对表2~表3 分析结果,对UAV 空战能力优化提出改进措施,空战不安全行为改进措施如表4 所示.
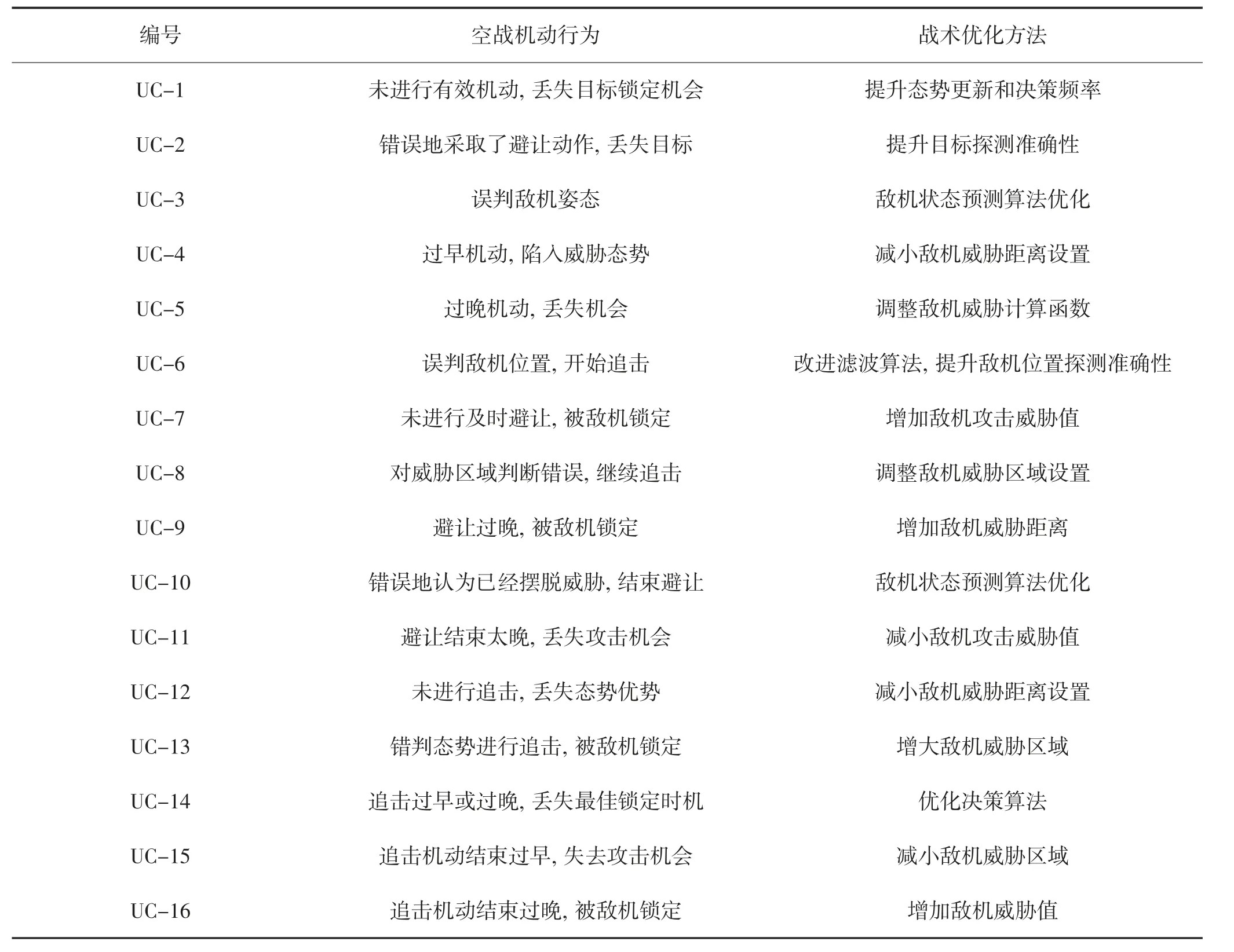
表4 空战对抗不安全行为改进措施Table 4 Improvement measures for unsafe behaviors in air combat confrontation
UAV 系统部件的优化措施如表5 所示.
表5 UAV 空战系统部件优化措施Table 5 Optimization measures for components of UAV air combat system
3 验证平台构建与战术验证
3.1 空战对抗平台构建
3.1.1 验证平台架构
验证平台主要用于验证技术优化方案对空战胜率的影响.由于前期提出的一系列战术改进策略或技术优化方案仅仅是根据决策者的先验知识形成,最终对胜率的影响则需要基于更为科学的手段进行评估.验证平台主要由输入层、运行层及输出层组成.输入层用于输入敌我双方的初始态势、交战规则及性能参数;运行层基于输入参数开展虚拟对抗模拟,记录过程数据;输出层提取用户所需的数据,经处理后输出给用户,同时展现空战动态过程,为战术方案的优化和技术的改进提供决策支撑.验证平台框架如图4 所示.

图4 UAV 空战验证平台Fig.4 UAV air combat verification platform
3.1.2 空战机动模型
本文重点研究UAV 一对一对抗空战的态势分析与战术优化.在超视距空战对抗过程中,水平机动空间相对于垂直机动空间广泛得多,而水平机动方式也是争夺态势和摆脱攻击的主要方式,因此,空战机动模型也主要基于二维水平空间构建.
构建虚拟对抗模型.通常为了能够进行快速的UAV 机动决策计算,会把空间进行离散化,但离散化的空间环境会影响空战对抗的真实性.特别是在较为广泛的空战场内,分辨率越高,对计算的速度影响越大,分辨率低则影响验证结论的正确性.对此,在连续的空战场内,使用动态栅格进行机动决策,基于决策结论在连续域内进行机动控制.敌我方UAV 在栅格内的坐标始终固定,栅格根据UAV 的相对位置自适应旋转.动态栅格如图5 所示.
图5 动态栅格环境Fig.5 Dynamic grid environment
规定动态栅格坐标与大地坐标之间的旋转角顺时针方向为负,则坐标变换公式为:
式中,θg为栅格坐标与大地坐标之间的交角;(xg,y)g为某一栅格坐标;(x,y)为转换后对应的大地坐标;为无人机在栅格坐标中的位置向量与X 轴形成的夹角,逆时针旋转为正.在栅格环境内,基于QL(Q Learning)算法进行路径规划[3],若路径的第一步为左转、直行或右转,则向飞行控制系统发送左转、直行或右转的指令,实现无人机的机动控制.以红方UAV 为例,UAV 机动控制模型为:
式中,(xr,yr)为红方UAV 的位置坐标;vr为红方UAV的速度;φr为红方UAV 的航向;ar为红方UAV 的加速度;ωr为红方UAV 的转弯角速度.
实施实验室管理规范化、科学化工作中,提高人员素质是关键。管理是一种社会行为,是人与人之间发生作用的过程,在管理过程的各个环节,只有人才是主体,是决定管理效率的关键,而决定管理水平的高低又取决于人员素质,人员素质是指管理人员在承担一定的管理事务中所必须具备的基本条件,在实验室管理规范化、科学化工作中要求工作人员应具有政治素质、心理素质和业务素质等基本素质。
3.2 评价指标设计
UAV 操控员在战术优化过程中,需要从空战过程中根据UAV 的航迹信息得知战术缺陷,也要知道提出的优化方案对最终胜负的影响.又由于UAV 空战对抗充满了不确定性,因此,每一局对抗都有胜或者负的可能,因此,优化方案的有效性需要通过多局对抗仿真模拟得出的胜负率得出.胜负率计算方法为:
式中,Rr为红方胜负的比率;为红方对局取胜的局数;为红方对局败的局数.
3.3 战术优化仿真验证分析
由于技术优化的周期较长,在空战中很难发挥立竿见影的效果,因此,重点对战术的优化进行验证,两者优化流程相似,不再重复进行论述.通过对表3的战术机动行为和战术优化方法进行分析可以发现,对敌机武器威胁距离、角度及程度的判断失误是导致态势丢失的重要原因.武器命中概率与敌我之间的距离、相对角度、电子干扰等要素有关,距离敌机越近,命中概率越高,但被击落的风险也越高,因此,对于敌机最大威胁区域及我机最佳机动距离的确定是提升空战胜率的关键.假设敌机的火控雷达电磁辐射规律已经被我方电子侦查机捕获加以分析,并形成了攻击概率函数,表示方法同式(1)~式(3).基于空战验证平台,开展战术优化论证,首先是导入初始态势,如表6 所示.
表6 验证平台初始参数设置Table 6 Initial parameter setting of validation platform
战术验证中,红蓝方火控雷达辐射角度均为60°,蓝方的火控雷达工作距离取不同的值,通过胜负率考察敌机的主要威胁区域,识别最佳的机动距离和相对角度.在仿真验证过程中,首先对空战对抗过程进行分析,查看过程模拟的有效性,如图6 所示.
图6 UAV 对抗空战过程Fig.6 UAV air combat confrontation process
从仿真图可以看出平台可以对空战过程进行模拟.为探索最佳机动距离,对敌机火控雷达不同作用距离下,采取不同机动距离的空战胜负比进行分析,结果如图7 所示.
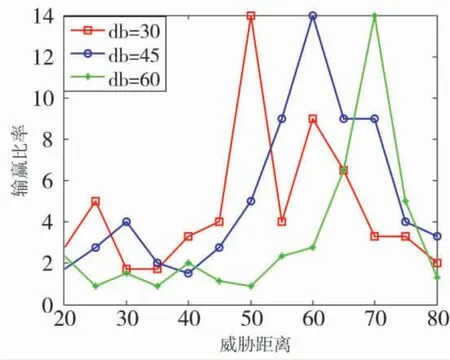
图7 UAV 对抗空战胜负比Fig.7 Win-lose ratio of UAV air combat confrontation
图7 中红色、蓝色、绿色曲线为蓝方火控雷达作用距离,分别为30 km、45 km、60 km 时的胜负比曲线.可以看出,最佳机动距离应当比敌机的火控雷达作用距离多10 km~20 km,若机动距离再加大,则会出现过早机动,若机动距离再缩小,则会出现过晚机动.在蓝方火控雷达作用距离为60 km 的前提下,考察不同机动距离和机动相对角度之间的关系,形成的胜负包络曲线如图8 所示.
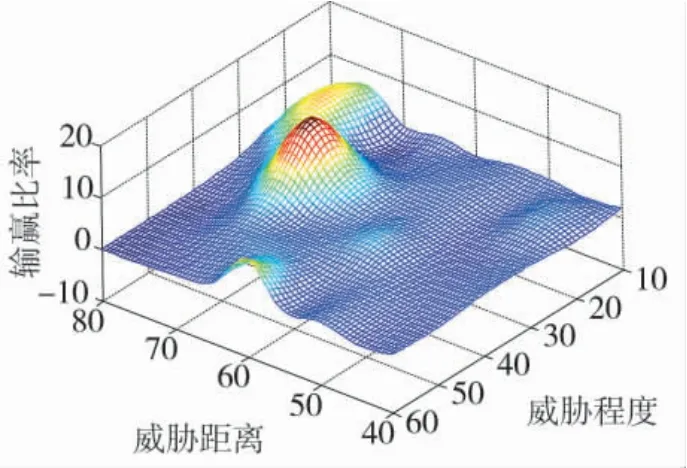
图8 UAV 空战对抗胜负包络曲线Fig.8 Win-lose envelope curve of UAV air combat confrontation
通过包络曲线的分析可以迅速得出最佳机动距离和机动角度之间关系,在敌机火控雷达有效作用距离为60 km,辐射角度为60°的条件下,红方的最佳机动距离为75 km,最佳机动相对角度为40°,此时可以实现最佳的胜负比为27/3.
本文的研究对象为UAV 中远距空战的评估与战术优化,主要在二维平面内展开分析研究,但在中远距空战中,高度的活动空间相对于水平面内的活动空间极为狭小,通过垂直机动很难躲避火控雷达的搜索,因此,主要还是通过水平机动开展空战对抗,研究成果拓展到三维空间仍然有效.
4 结论
基于STPA 分析方法,对UAV 的对抗空战过程展开分析,并设计了战术优化验证平台,通过验证,得出了以下结论:
1)通过STPA 方法可以对UAV 对抗空战过程进行建模,并通过态势的分析,识别空战失利的内在原因,原因包含了机动控制战术和系统部件两个层面.
2)设计了UAV 空战对抗的战术验证平台,可快速对UAV 的对抗空战战术进行虚拟对抗验证,为战术优化的有效性提供数据支撑.但本文方法对战术的优化需要提前对敌机的火控雷达性能和弹药性能有一定的了解,否则无法开展战术验证.
3)在对UAV 空战失利态势充分识别的基础上,绘制了对抗胜负包络曲线,通过最佳机动距离和机动相对角的组合选取,可有效提升空战胜负比.
4)当前的战术优化验证还有大量人工参与的工作,对规划人员的业务能力有较高依赖性,在下一步的工作中将优化评估方法,提升评估的自动化和效率,强化作战能力.
猜你喜欢
小学生学习指导·高年级(2023年8期)2023-11-19
小哥白尼(军事科学)(2022年1期)2022-04-26
小学生学习指导(小军迷联盟)(2021年11期)2022-01-18
中国军转民(2017年11期)2018-01-31
军营文化天地(2017年6期)2017-06-28
百科探秘·航空航天(2015年10期)2015-11-07
棋艺(2014年3期)2014-05-29
棋艺(2009年8期)2009-04-29
小哥白尼·军事科学画报(2009年6期)2009-02-03
军事历史(1999年3期)1999-08-20