异构无人艇与尾座无人机分布式鲁棒牵制协同控制
2024-01-26 03:18刘德元吕金虎
指挥与控制学报 2023年6期
刘 昊 刘德元 高 庆 吕金虎
随着经济和科技的发展,无人系统在海洋作业中的应用具有广泛的前景.海洋环境复杂,传统单架无人机或者单艘无人艇很难满足作业任务要求[1-3].随着无人系统自动化、集群化和智能化的快速发展,由多架无人机和无人艇组成的空海跨域异构系统,充分结合无人机探测范围广和无人艇续航力强载荷多的优势,具有更强的作业能力和多维空间信息感知能力,大大提高工作效率和完成任务的可靠性.无人机/无人艇跨域协同控制问题已成为控制领域的研究热点,引起了很多学者的关注[4-5].
常用的艇载无人机主要有旋翼无人机和固定翼无人机.旋翼无人机续航时间短,难以满足长时间大范围感知和巡查等要求,固定翼无人机飞行效率相对较高,且飞行速度快、续航时间长,但是固定翼无人机起飞和降落需要辅助设备[6-7].结合固定翼无人机与多旋翼无人机的优点,开发具有高速续航和垂直起降能力的新型尾座无人机得到了许多军事强国的重视.为了更好地发挥无人机/无人艇协同工作的优势,开展多架尾座无人机和无人艇协同编队控制问题研究,对于提高我国无人系统集群在海洋应用的作业能力、覆盖范围、协同效率具有重要意义.
协同编队控制问题是无人艇和无人机异构系统协同作业的基础和难点,面临着许多挑战.空中无人机和水面无人艇之间存在异构特性(不同的工作空间和动力学).两种模型之间的差异增加了协同控制器设计的难度.在协同任务中,易受洋流和风浪等外界复杂扰动影响,给编队系统的稳定控制带来了挑战.空中无人机具有飞行速度快和大空域机动飞行的特点,编队协同控制器需要快速高精度地响应形成预定编队.无人艇/无人机动力学模型还具有非线性、参数不确定性特点.
相关学者针对无人机和无人艇的同构编队控制问题开展了研究.在无人机编队方面,文献[8-9]针对无人机集群提出了分布式编队控制方法.文献[10]设计了一种鲁棒自适应编队控制器,实现了无人机的编队飞行.文献[11]提出了一种基于仿射变换的微型无人机编队飞行控制算法.在无人艇编队方面,文献[12] 提出了一种合作学习协同编队控制策略.文献[13-14] 针对无人艇集群系统控制问题,提出了自适应编队控制方法.多架无人机和无人艇异构协同控制问题需要进一步研究.文献[15]针对无人艇和无人机组成的异构线性系统,设计了一种一致性控制协议.文献[16]通过简化无人艇和无人机模型,提出了一种分层控制方法.文献[17]提出了一种基于虚拟结构与人工势场相结合的无人艇和无人机协同控制方法,实现了编队队形的保持.文献[18]针对有向通信拓扑条件下无人艇和无人机集群编队控制问题,提出了一种分布式编队控制协议.文献[19]提出了一种基于事件触发机制的无人艇和无人机编队控制协议.在上述文献中,考虑的模型是线性的或者是简化的,没有同时考虑控制器设计中的外界干扰问题.牵制控制方法已广泛应用于多智能体系统的协作控制问题[20-24].
本文研究由多架尾座无人机和无人艇组成的异构编队系统控制问题,提出一种分布式鲁棒牵制异构协同控制方法.特别地,引入一个虚拟牵制者,直接牵制一部分无人机和无人艇(被视为牵制节点)运动;剩余无人机和无人艇跟随选取的牵制节点,实现期望的编队协同.与已有文献相比,主要贡献有:1)在有向通讯拓扑结构下,构建了一个由多架尾座无人机和多艘无人艇组成的异构协同系统,与传统的异构无人机/无人艇协同系统相比,可以执行更复杂的任务.2)提出了一种分布式鲁棒牵制协同控制方法,可以使所构建的异构系统能够在复杂环境中实现期望的编队协同.3)在控制器设计过程中,充分考虑了海洋环境复杂干扰、模型非线性和系统参数不确定性影响,保证了编队协同系统的鲁棒性.
1 问题描述
1.1 图论
1.2 系统模型
由尾座无人机和无人艇组成的编队系统如图1所示.空中尾座无人飞机结合了固定翼无人机与四旋翼无人机的特点,具有高速巡航和垂直起降的无人机.其主要推力由安装在头部的螺旋桨产生,不同模式下的飞行姿态主要由4 个旋翼和两个副翼控制实现.
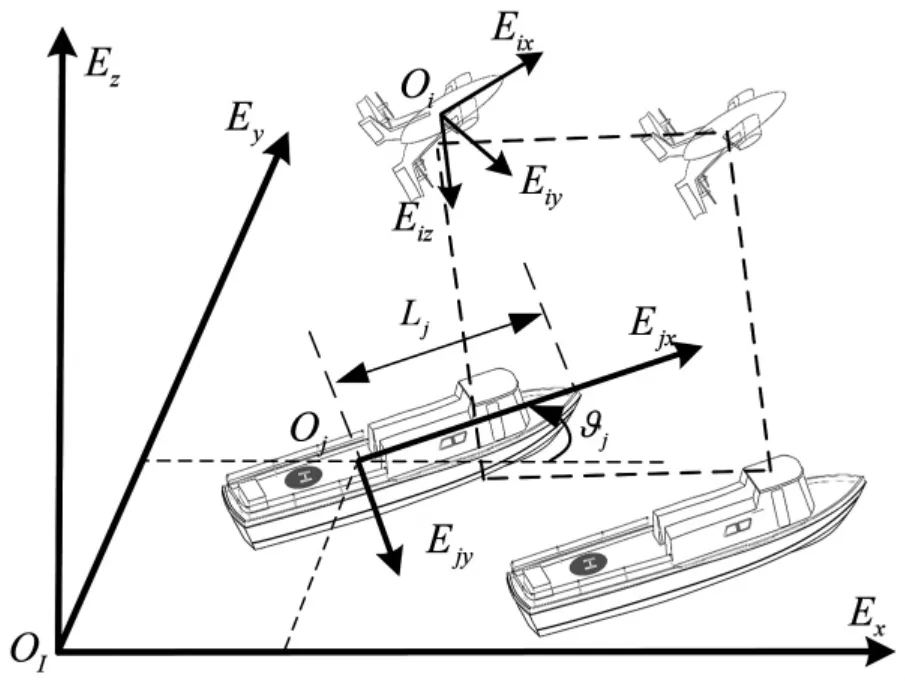
图1 尾座无人机和无人艇组成的异构协同系统Fig.1 Heterogeneous coordination system composed of tailstock UAVs and USVs
Fit主要由重力,气动力Fif,推力Fic和外界干扰力Fid组成,其表达式为
其中,Ri表示无人机所在两个坐标系之间的旋转矩阵,,kit表示一个推力系数,ωij表示4 个电机的旋转速度,g 表示引力常量,.Mit主要由控制力矩Mic,气动力Miw,陀螺效应产生的附加力矩Mie和外界干扰力矩Mid,组成,其表达式为
其中,Mic可由式(5)计算得到
其中,Mir表示由电机产生的力矩,Mia表示由副翼产生的力矩.Mir和Mia分别由式(6)和式(7)计算得到
其中,air,aiω,li1,li2,li3,Sir,Ciσ表示无人机模型参数,ρ 表示空气密度,αi表示无人机攻角,vix,viz分别表示无人机在局部坐标系下的纵向速度和高度方向速度,,表示两个副翼偏角.
无人艇动态模型可以描述为[5,13]
式中,pis,x,pis,y分别表示无人艇在惯性坐标系的纵向位置和横向位置,ϑi表示无人艇的偏航角,vis,x,vis,y分别表示无人艇的纵向线速度和横向线速度,ri为无人艇偏航角速度,τix和τir表示无人艇的控制输入,mis,1,mis,2,mis,3表示无人艇的质量和惯性系数,dis,1,dis,2,dis,3表示无人艇的阻尼系数,div,1,div,2和div,3表示无人艇受到的外界干扰.
式中,Li为无人艇的参考点到质心的距离.对式(9)求导,可以得到
于是,式(10)可改写为
1.3 控制目标
本文主要研究多架尾座无人机和无人艇组成的异构协同系统在外界干扰和不确定性影响下的鲁棒控制问题,通过设计一种鲁棒牵制协同控制器,使无人机和无人艇异构编队系统保持特定队形向指定目标运动或完成复杂作业任务.特别地,引入一个虚拟牵制者,直接牵制一部分无人机和无人艇(被视为牵制节点)运动;剩余无人机和无人艇跟随被牵制节点运动,实现期望的编队协同.
考虑由n 架尾座无人机和m 艘无人艇组成的异构协同系统.尾座无人机是一种六自由度系统(3 个姿态自由度和3 个位置自由度),姿态动态是内动态,其控制器的设计不需要其他节点信息.对于大多数无人艇的运动控制问题而言,主要考虑其水平面的三自由度运动(如航向控制、航迹控制).因此,本文将重点放在每个群体成员的位置子系统上,设计鲁棒牵制控制器,实现编队协同控制.
为了方便控制器设计,将尾座无人机和无人艇的位置运动模型统一表示为
如果节点i 表示无人机,则
如果节点i 表示无人艇,则
本文在控制器设计过程中,同时考虑了外界干扰、模型非线性和参数不确定性对闭环系统的影响.
2 鲁棒牵制控制器设计
针对多架尾座无人机和多艘无人艇在外界干扰和多种不确定性影响下的协同控制问题,提出一种鲁棒牵制协同控制器,实现期望的控制目标.
为了抑制干扰△ip对于全局闭环系统的影响,设计鲁棒控制项如下
fp1,fp2表示两个鲁棒控制器参数.实际上,通过选取合适的控制器参数fp1,fp2可以得到的期望频率带宽.当的增益接近1 时,从式(13)和式(19)可以看出,△ip对于闭环系统的影响会被抑制.然而,在复杂环境里,不能得到△ip的精确描述.因此,的实现不能依靠△ip.从式(13)可以得到
其中,ηi1和ηi2表示鲁棒控制输入的两个状态量.
值得注意的是,所设计的协同控制协议是分层的,一个虚拟领导者被视为牵制者,直接牵制一部分无人机和无人艇(被视为牵制节点)运动;剩余无人机和无人艇跟随牵制节点运动,实现编队协同控制目标.
与传统的机艇协同编队相比,本文构建的异构协同系统可以执行更为复杂的任务.在实际应用中,尾座无人机作为空中编队平台可以为无人艇提供相对开阔的视野范围,水面无人艇可以与无人机保持期望的协同编队,并为无人机提供安全的起降平台.
本文充分考虑了海洋环境复杂干扰、模型非线性和系统参数不确定性影响,通过所设计编队控制器可以保证系统的鲁棒性.
3 鲁棒性分析
定理1:对于多架尾座无人机式(1)和多艘无人艇式(8)组成的异构协同系统,利用第2 节设计的鲁棒牵制协同控制器,在不确定性和外界干扰影响下可以实现期望的协同编队任务,并且,对于任意ε>0,存在t0>0,T >0,fp*>0,如果,则对于一致有界,且.
证明:定义
式(25)中∏ip可以写为如下形式
由式(14)和式(15)可以得到
由式(35)可得
由式(24)可得
由定理1 可以看出,通过选择适当的控制器参数,所构建的异构协同系统可以在外界扰动、参数不确定性和模型非线性影响下具有鲁棒性,且全局闭环系统误差可以在有限时间内收敛到一个较小的邻域内.
4 仿真验证
通过数值仿真验证所提出的编队控制方法有效性.仿真中,考虑由一个虚拟牵制者、3 架尾座无人机和3 艘无人艇组成的异构协同系统.3 架无人机分别从相应的无人艇上垂直起飞;然后,水面无人艇与无人机保持期望的编队构型,执行协同任务.系统的通讯拓扑图如图2 所示,其中,无人机1 被选为牵制节点.
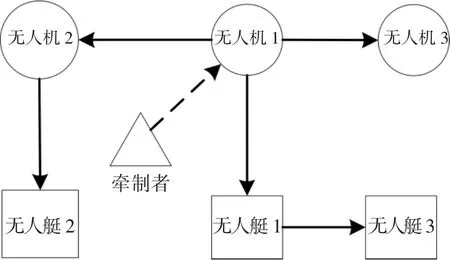
图2 通信拓扑图Fig.2 The communication topology
尾座无人机参数设置为[7]:mit=50 kg,Jit=diag{0.2,0.2,0.4}kg·m2,Sir=0.45 m2.无人艇参数[13]为:mis,1=646 kg,mis,2=837 kg,mis,3=155 kg·m2,dis,1=303 kg/s,dis,2=425 kg/s,dis,3=74 kg·m2/s.
仿真中,模型参数不确定性考虑为标称参数的,作用在尾座无人机和水面无人艇上的外界干扰分别设置如下:
无人机和无人艇的初始位置分别设置如下:
用所提控制器得到的仿真结果如图3~图5 所示.图3 为无人机和无人艇协同编队的三维轨迹.图4为无人机跟踪误差曲线,图5 位水面无人艇的轨迹跟踪误差.为了进一步验证所提方法的有效性,应用文献[15]中的控制器作为对比,图6 和图7 分别描述了相应的轨迹跟踪误差.从图3~图5 可以看出,在所提控制律的作用下,协同编队跟踪误差会迅速收敛到一个原点附近较小的邻域内,表明所提控制律对于复杂外界干扰和参数不确定性具有良好的补偿能力,且具有较强的鲁棒性.从上述对比结果可以看出,在复杂外界干扰和参数不确定性下所提控制器可以实现多架尾座无人机和多艘无人艇的协同编队,且所提出的鲁棒控制器可以获得更好的性能.
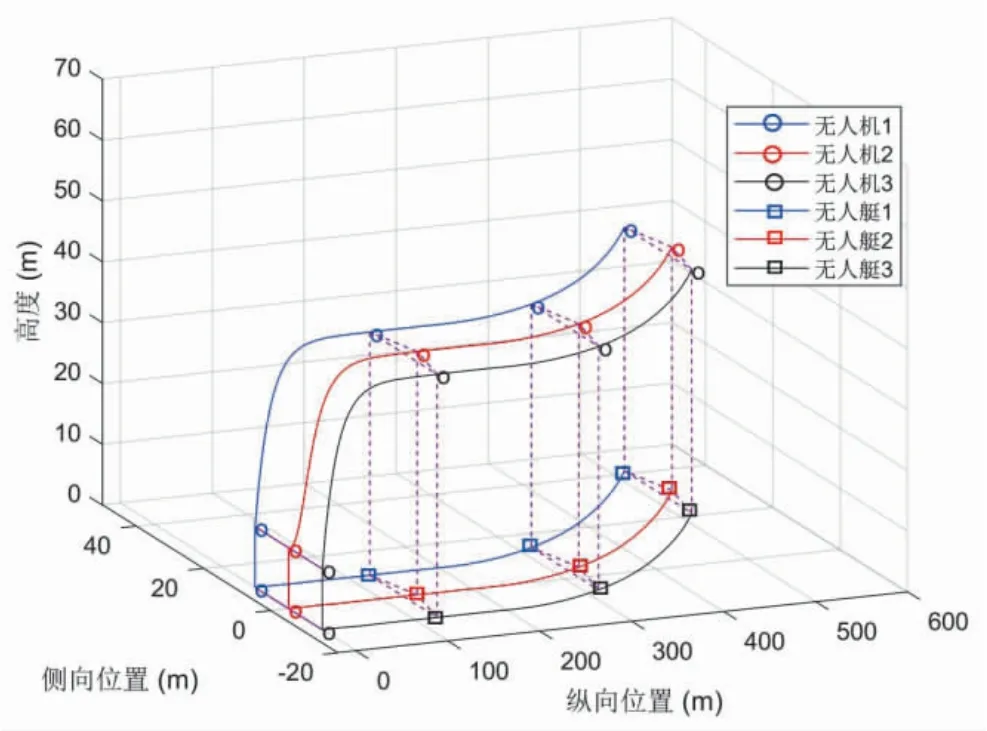
图3 3 维协同轨迹(所提控制器)Fig.3 3D coordination trajectory(proposed controller)
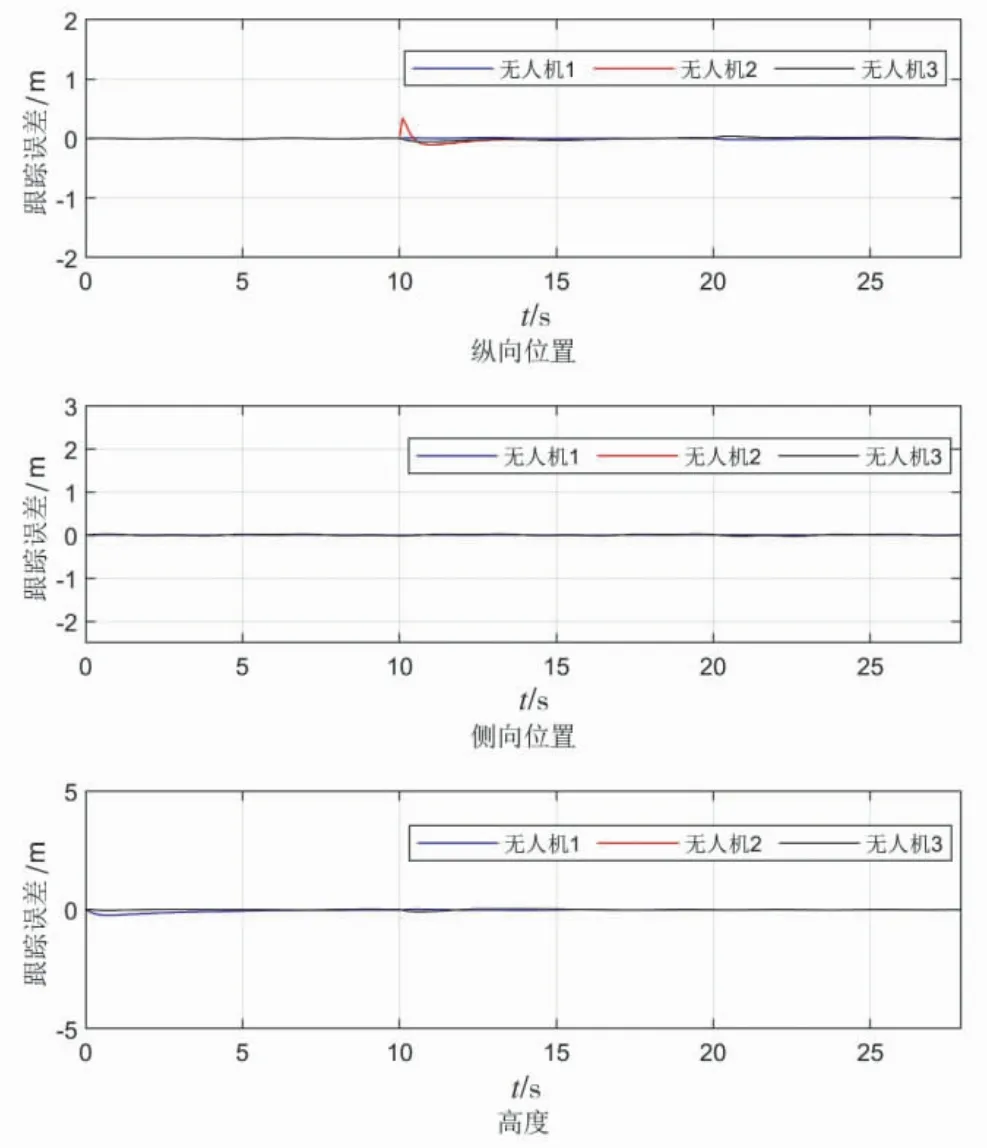
图4 尾座无人机位置偏差(所提控制器)Fig.4 Position errors of tailstock UAVs(proposed controller)
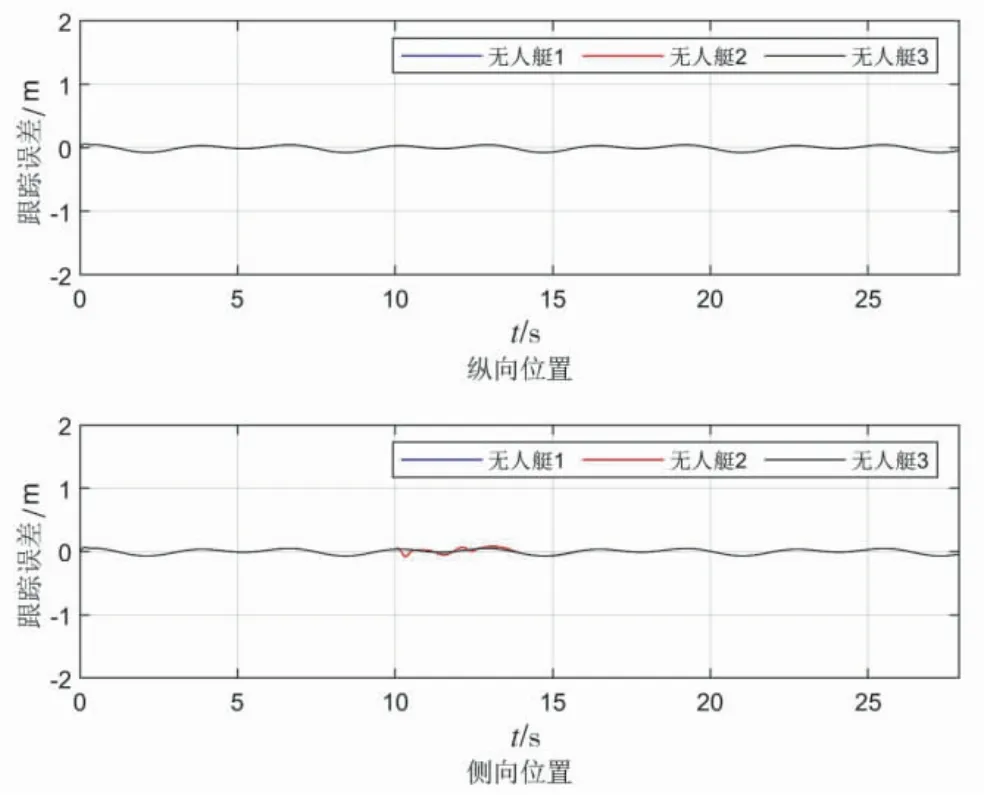
图5 无人艇位置偏差(所提控制器)Fig.5 Position errors of USVs(proposed controller)
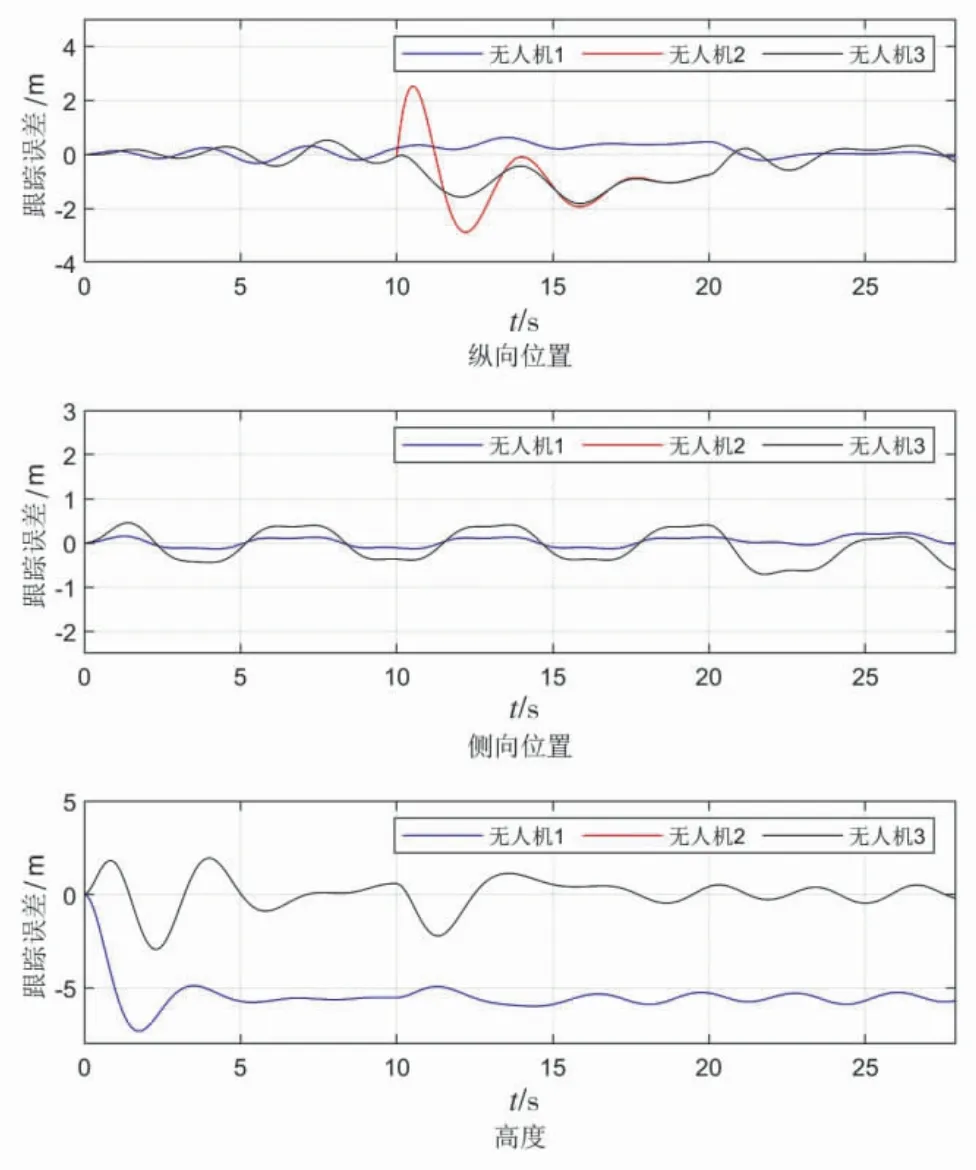
图6 尾座无人机位置偏差(对比控制器)Fig.6 Position errors of tailstock UAVs(compared controller)

图7 无人艇位置偏差(对比控制器)Fig.7 Position errors of USVs(compared controller)
5 结论
本文基于有向通讯拓扑结构,构建了一个由多架尾座无人机和多艘无人艇组成的异构协同系统,提出了一种分布式异构鲁棒牵制协同控制方法.所设计的控制器由牵制控制项、协同控制项和抑制外界干扰和不确定性的鲁棒补偿项组成.由理论分析可知,在复杂外界干扰和不确定性影响下,系统的跟踪误差可以在有限时间内快速收敛到一个较小的邻域内.对比仿真结果显示了所提方法可以实现多架尾座无人机和多艘无人艇的协同编队,验证了所提方法的有效性.
猜你喜欢
云南画报(2022年4期)2022-05-05
自动化学报(2019年6期)2019-07-23
商品与质量(2019年43期)2019-05-25
中学课程辅导·教学研究(2017年11期)2017-09-23
自动化学报(2017年4期)2017-06-15
制造技术与机床(2017年2期)2017-05-04
人间(2015年20期)2016-01-04
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
金属加工(热加工)(2015年17期)2015-04-23
浙江大学学报(工学版)(2015年1期)2015-03-01