基于飞行智能浮标测流系统设计与实现
2024-03-04 10:39吴超群肖子平吴瑞钦
陕西水利 2024年1期
吴超群,肖子平,吴瑞钦
(广东省水文局湛江水文分局,广东 湛江 524000)
1 前言
在水文测验中,河道流量的测验工作是河流测量的重要内容,也是水文计算、水土保持、水资源评价以及水生态环境评估的重要基础数据[1],因此准确、便捷的流量测验具有重要的现实意义。
常规河流、渠道流速、流量测验以缆道流速仪为标准,随着电子、通讯技术的发展,其他测流设备呈现出多样化的趋势,测量方式不断创新。传统测流设备已经不能满足洪水期、信息化以及水文现代化发展的需求,特别是针对应急环境下的流量测验工作[2]。当河流处于洪水期、应急环境下时,走航式ADCP 电动船[3]、转子流速仪[3]、超声波时差法[4]、侧扫雷达[5]等设备都无法满足洪水期恶劣环境条件下工作,其中由于流速较大难以保持电动船航行、铅鱼缆道难以在水中保持静止、超声波时差法只能测量某一层的流速等。再者出现的非接触式无人机测流方式[6-7],由于其续航时间的限制也难以满足洪水期流量测验要求;GPS 智能测流系统采用高强度材料制作的浮球随水漂流,通过浮球内置高精度GPS 模块来测量水面流速、流向等要素,流速球GPS 依赖于多普勒值进行测速,利用载波相位差分得到的多普勒进行测速,这时所得到的的速度为相邻两差分时间间隔期间的平均速度,但GPS 浮标法[8-9]由于GPS 本身定位误差大进而导致测量数据不精确,且需要较多人工配合工作才能完成以及GPS 浮标难以回收,成本较高。GPS浮标智能测流系统的适应性非常强,受自然环境及天气因素的影响非常小,也不受能见度的限制,不受下雨、下雪等天气的影响,甚至不受通航的限制[10]。针对上述问题,本文借助无人机机动灵活、起降便捷等优势和GPS 浮标法测流技术优势相结合设计一种基于飞行智能浮标测流方式来应对洪水期流量测验工作,实现超标洪水期的流量测验自动化、便携化、实时性以及可回收性,其软件平台实现了内、外业 一体化操作,并且实时监控,减轻了测量人员的劳动强度,提高了工作效率,节约了大量的人力、物力、财力,同时有利于水文仪器的现代化发展方向。
2 飞行智能浮标系统设计
2.1 飞行浮标设计
该飞行智能浮标采用无人机为载体,其外壳结构采用一体化的防水设计,尺寸为300 mm×300 mm×150 mm,即飞行智能浮标类似于GPS 浮标功能,但它具有无人机的飞行能力。无人机系统由动力系统、图传系统、数传系统、地面站系统以及控制系统组成,其中动力系统为无人机提供动力;图传系统能够实时传输“第一视角”画面;数传系统能够将无人机的姿态、高度、速度等数据实时传输至地面站;地面站可用于显示任务规划、数据显示、展示以及处理;控制系统主要用手动控制无人机操作。外壳设计需要满足如下要求:
(1)外表面为适应流体结构采用流线型设计,减少阻力;
(2)载体底部凹槽式容置空间,搭载测深仪进行水位深度测量;
(3)无人机可以进行水上起降。其外结构见图1。

图1 飞行智能浮标
2.2 定位系统
该飞行智能浮标定位系统借助无人机载体的定位系统,为了提高定位精度采用无人机移动RTK 和基准RTK GNSS 设备进行差分定位,频率(GPS L1/L2,GLONASS G1/G2,BDS B1/B2,GALILEO E1/E5b,QZSSL1/L2),工作模式为GPS+GLONASS+BDS+GALILEO+QZSS 联合定位,定位精度达到±2 cm,见图2。
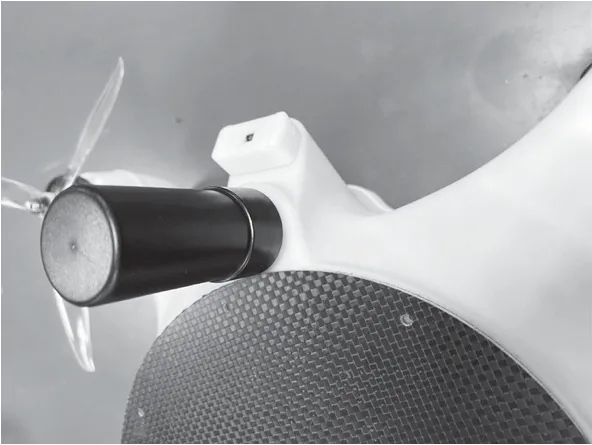
图2 移动RTK 安装位置
2.3 水体表层流速
水体表层流速通过飞行浮标载体漂移速度测得,其具体步骤为:
(1)飞行浮标手动飞行(或自主飞行)至水面上;
(2)降落在水面上的飞行浮标随水体流动(当做浮标),无人机在水面上的移动速度,也即水体表层流速,其速度通过无人机数传系统实时传输至无人机地面站上,同时无人机日志也将保存数据;
(3)测验完成后,飞行浮标飞行至下一个测量点进行下一个点测验。
2.4 数据传输系统
飞行浮标的移动速度(水体表层流速)、测深仪深度、携带可见光相机第一现场视角以及控制信号方式都是通过无人机的数图传系统一体化传输至地面站上,见图3。其数据传输方式数、图、控传输系统见图4。
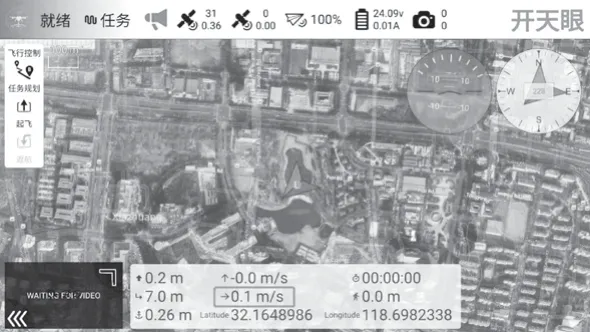
图3 无人机地面站
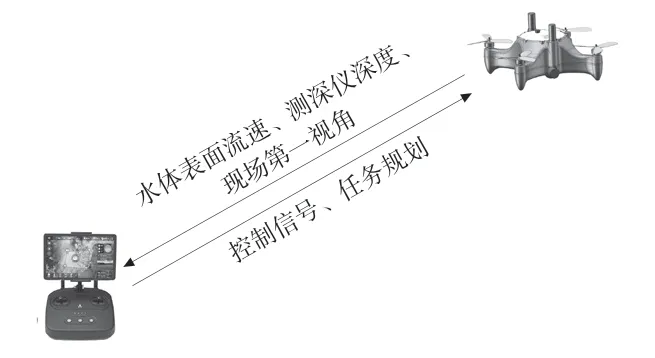
图4 数据传输系统
3 飞行智能浮标系统实现
选取安徽某明渠为例进行流量测验工作,本文采用中弘一点法浮标垂线测验,根据明渠流量和GPS 浮标系数0.84 进行流量测验工作。
3.1 水体表层流速计算
根据飞行智能浮标类比于GPS 浮标方式来获得其速度,其水体表层流速采用两种方式获得并进行比较,其中一种通过距离和时间来求得速度,一种是飞行智能浮标随水体流动漂移速度,两组均采用5 组求取平均值法进行比较,其具体实现步骤如下,实验见图5。

图5 流量测验实验图
步骤(1):飞行浮标准备降落在水面上。
步骤(2):飞行浮标降落A 点。
步骤(3):飞行浮标随水流漂移移动到B 点。
步骤(4):飞行浮标测完结束后起飞进行下一组测试,该方式可以进行手动飞行,也可以根据任务规划自主完成。
从图5(b)到图5(c)中可以根据A、B 两点距离和时间求得速度,也可以直接通过飞行浮标随水流漂移速度(即飞行浮标移动速度)实时传输至地面站获得图3 所示(红色框内表示无人机移动速度,即水体表层速度),测试5 组数据见表1,即水体表层流速等于无人浮标漂移速度。表1 显示在两种方法获得速度时误差在5%左右,这也符合在应急环境下的流速测得要求,因此用飞行智能浮标随水漂流来获得水体表层流速此方法是可行的。
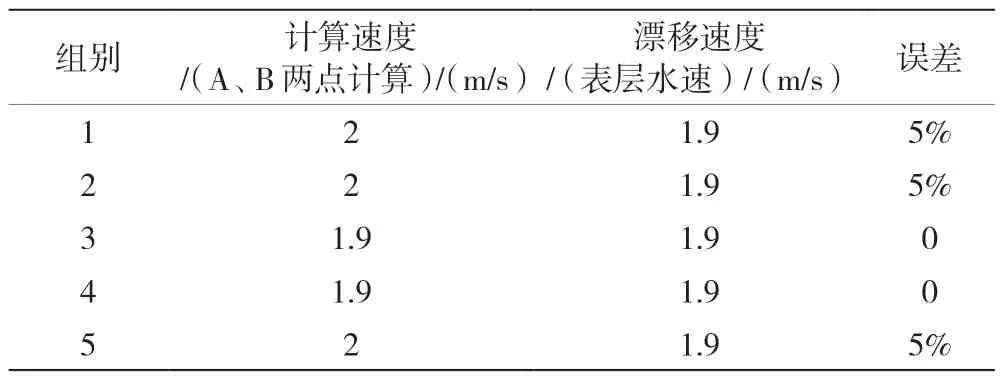
表1 水体表层流速
3.2 流量测验
在上述获得流速时,再导入大断面数据、水位数据,可计算断面过水面积,再利用中泓浮标法,将表面流速乘以中泓浮标系数可转换为断面平均流速,再利用断面平均流速乘以过水断面面积即可计算断面流量,其具体步骤如下。
浮标法流量测验属于流速面积法范畴[11],其公式为:
式中:Qf为虚流量,m3/s;Vf为飞行浮标载体所测流速,m/s;Af为所测垂线的相对河流断面面积m2。
式中:Q 为实际断面流量,m3/s,K 为浮标系数。设置明渠流量和GPS 浮标法进行比测见表2,可以发现飞行浮标法要明显优于GPS 浮标法在误差的允许范围内。
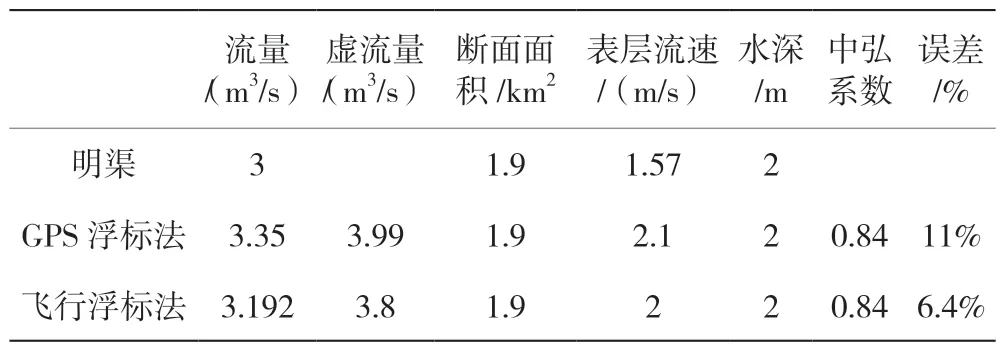
表2 流量比测工作
与此同时,比较了GPS 浮标法和飞行浮标法的优缺点见表3。其结果显示不管从人员、测量精度以及是否可以回收等问题,很明显的看出,飞行浮标法更有利于水文仪器现代化的发展需求,朝着智能化的发展趋势。

表3 GPS 浮标法和飞行浮标法比较
4 结论
飞行浮标法流量测验是洪水期GPS 浮标法、无人机测流法的一种重要的流量测验补充方式,它利用了无人机的机动灵活、水上起降等特点并凭借其精确的差分定位系统大大改善了GPS 浮标法的GPS 定位差、需要多人员配合工作才能完成的测流方式,大大解放了“劳动力”,这提高了流量测验的效率,更好地服务于水文现代化的发展需求。
猜你喜欢
家教世界·创新阅读(2023年3期)2023-06-09
家教世界·创新阅读(2023年2期)2023-06-07
家教世界(2023年7期)2023-03-22
家教世界(2023年4期)2023-03-04
黑龙江水利科技(2022年4期)2022-05-25
石河子科技(2022年4期)2022-03-24
趣味(语文)(2018年7期)2018-06-26
山东水利(2018年6期)2018-03-24
考试周刊(2016年88期)2016-11-24
水利科技与经济(2016年8期)2016-04-22