基于NSGA-II 传感位置优化的曲面重构及误差补偿方法
2024-03-16 07:12尚秋峰张晓旭
光子学报 2024年2期
尚秋峰,张晓旭
(1 华北电力大学 电子与通信工程系,保定 071003)(2 河北省电力物联网技术重点实验室,保定 071003)(3 保定市光纤传感与光通信技术重点实验室,保定 071003)
0 引言
薄层合金板由于其优良的力学性能、长疲劳寿命、高强度和优异的耐腐蚀性,已被广泛应用于航空航天、船舶和民用建筑中[1]。然而,薄层结构容易受到非线性外力的影响,必须通过可靠的检测系统来保证其安全,进而提高其使用寿命。当前典型的结构检测重建方法包括:逆有限元法、ko 位移理论、相机测量方法、模态法。逆有限元法模型复杂,需要编写复杂算法才可以得到精确的单元边界条件,工作量大;ko 位移理论需要大量的传感器来保证测量精度;摄像机测量方法对图像清晰度要求较高,系统处理的数据量大,实时性差;模态法可以依据少量传感信息重构结构形状,且重构精度高[2]。
模态法重构时需要应变传感器测量结构部分位置点的应变,而光纤布拉格光栅(Fiber Bragg Grating,FBG)传感器由于其具有重量轻、测量精度高、抗电磁干扰等特点,被广泛应用于结构重建研究中[3]。直观来看,某一结构上布置的FBG 传感器越多,获得的信息就越全面,但是当使用的FBG 传感器过多时,必然会导致FBG 布置困难和传感信息冗余。张笑华等[4]从传感器位置候选群中不断删除对响应重构精度贡献最小的位置,直到最大规则化重构误差方差或者平均规则化重构误差方差等于或者大于预设的阀值,由此来确定传感器优化的位置,但当传感器候选位置较多时,方法计算量较大。PEI Xueyang 等[5]提出了一种基于刚度误差和条件熵结合的最佳传感位置选取方法,但需要通过蒙特卡罗方法计算高维积分,计算量大。基于快速和精英机制的非支配排序遗传算法(Non-dominated Sorting Genetic Algorithm-II,NSGA-II)是多目标优化算法的典型代表,引入了快速非支配排序、精英策略和拥挤度算子,在降低算法的计算复杂度的同时还可更好地将优秀的个体进行保留[6]。
利用模态法重构结构形状时,由于仿真模型与实际物体不完全匹配、应变测量不准确等原因,不免会产生误差,利用误差补偿重构结果,可以提高重构精度。GIUSEPPE R 等[7]利用多项式拟合传感器随机误差,具有一定的补偿效果,然而,当误差呈现复杂的非线性特征时,多项式拟合方法需要更多高阶项,拟合效果不理想。神经网络具有强大的非线性函数拟合能力。面对复杂的非线性误差,基于神经网络的非参数辨识是一种更为有效的方法。反向传播(Back Propagation,BP)神经网络是常用的神经网络之一,其建模效果通常优于多项式拟合方法。但BP 神经网络在训练过程中,由于初始权值和阈值的选择不当,通常无法达到局部最小值[8]。径向基函数(Radial Basis Function,RBF)神经网络是一种前馈型神经网络,网络结构简单、学习速度快、非线性拟合能力强,具有全局逼近能力,可从根本上解决局部最优问题,而粒子群优化(Particle Swarm Optimization,PSO)算法不依赖目标函数的梯度信息,能够解决复杂的非线性高维问题,很好地解决RBF 神经网络泛化性能减弱的问题[9],提高拟合精度。
为实现薄层合金板的高精度形状重构,本文以镍钛形状记忆合金板为例,在ANSYS workbench18 建立有限元模型,依据模态理论,考虑模态置信度、模态信息冗余性和转换矩阵稳定性三个目标函数,利用NSGA-II 算法实现最佳传感位置选取,利用粒子群优化径向基函数(PSO-RBF)神经网络算法拟合重构误差与重构位移的关系,通过误差补偿提高三维形状重构精度。
1 传感原理及重构算法
1.1 光纤光栅传感原理
FBG 传感器原理如图1 所示,当一定宽度频率的光入射FBG 时,频率在λB附近的光波被反射出来,而波长不是λB的光波成功透射过FBG,λB被称为FBG 中心波长[10]。满足公式

图1 FBG 传感原理Fig.1 Principle of FGB sensing
式中,neff为光纤的有效折射率,Λ为光栅周期。neff和Λ会随着温度和应变而变化,当温度恒定时,λB的大小只与应变有关,当FBG 受到轴向应变时,Λ会发生变化,而neff变化较小,可忽略不计。此时中心波长偏移量ΔλB可表示为
式中,Pe为光纤的弹光系数,ε为FBG 的应变量。
1.2 模态法重构原理
根据模态叠加原理[11],M个传感位置点的应变为
式中,εM为传感位置点的应变,ΨM(d)为传感位置点的应变模态振型,模态坐标qm可以由最小二乘法求解,即
形变位移为
式中,q̂为重构的位移向量,Φs为位移模态振型矩阵,Τ(d)是转换矩阵。因此,通过转换矩阵Τ(d),可由少量应变测点数据推出全部位置的形变数据。
2 结构建模及FBG 应变标定
2.1 镍钛合金仿真建模
由于镍钛合金具有形状记忆功能,因此采用镍钛合金板作为形变结构模型。基于ANSYS workbench18软件平台,建立如图2 所示长为150 mm、宽为150 mm、高为0.5 mm 的镍钛合金板的有限元模型,在镍钛合金板板中间位置施加固定约束。

图2 有限元仿真模型Fig.2 Finite element simulation model
在进行ANSYS 有限元模态分析时,截取模态的有效模态质量参与比大于0.8[12]。通过对金属板进行模态分析,得到其前n阶模态的有效参与质量如表1 所示。

表1 有效参与质量累加表Table 1 Participate effectively in the quality accumulation table
表1 结果显示:当截取阶数为8 时,x、y、z三个方向的有效参与质量均达到了0.8 以上,因此使用8 个FBG 传感器即可实现曲面形状重构。提取前8 阶位移模态振型及应变模态振型作为重构算法的输入信息。
2.2 FBG 应变标定
物体弯曲时,其中间位置的长度不会改变,仍为L,下表面长度为L-ΔL,上表面长度为L+ΔL,如图3所示,有[13]
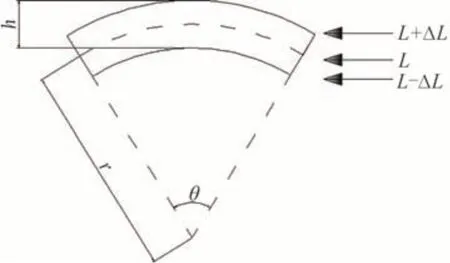
图3 弯曲条件下FBG 形变Fig.3 FBG deformation diagram under bending conditions
式中,L为标定板板长度,h为其厚度,r为圆弧曲率半径。
由于FBG 的形变量与栅区长度之比和标定板形变量与长度之比相等,因此FBG 的应变为
实验采用曲率半径分别为150 mm、160 mm、170 mm、180 mm、190 mm、200 mm 的圆弧作为应变标定及测量装置,用环氧树脂胶将FBG 粘贴至镍钛合金板,将镍钛合金板固定在3D 打印好的弧形上,如图4所示。

图4 FBG 应变标定图Fig.4 Calibration diagram of FBG strain
采用的光栅解调设备是微光解调仪sm125,解调波长精度为1 pm,解调波长动态范围是1 510~1 590 nm。采用的FBG 的工作温度均为常温20 ℃,环氧树脂的工作温度范围是-50~+180 ℃,在常温20 ℃时,15 h 左右固化,应变传递率达到98.4%[14]。FBG#1~FBG#8 的初始中心波长分别为1 560.600 1 nm、1 561.055 3 nm、1 539.819 2 nm、1 561.205 2 nm、1 554.811 5 nm、1 538.037 9 nm、1 561.027 3 nm、1 539.896 6 nm。FBG#1~FBG#8的中心波长最大变化范围分别为±1.508 6 nm、±1.519 6 nm、±2.267 3 nm、±1.620 3 nm、±2.178 7 nm、±1.803 8 nm、±1.526 8 nm、±2.293 2 nm。拟合出应变与中心波长的线性关系,如图5 所示。

图5 FBG 波长漂移随应变的变化关系Fig.5 Variation of wavelength shift of FBG with strain
可以看出波长漂移随应变线性变化,依据此线性关系的斜率及截距,即可根据波长漂移量计算出相应的应变。分别采集每个FBG 在不同弯曲状态下及卸载载荷时的中心波长,每次形变卸载载荷时与初始状态时的中心波长差距在1 pm 左右,可视为镍钛合金板在卸载载荷后恢复了初始形状。
3 基于NSGA-II 算法的最佳传感点位置选取
3.1 NSGA-II 算法流程
NSGA-II 通过基于非支配排序的方法保留了种群中的优良个体,并且利用适应度共享函数保持了群体的多样性[15]。其算法流程如图6 所示。其算法步骤为:

图6 NSGA-II 算法流程Fig.6 Flow chart of NSGA-II algorithm
1)初始化目标变量个数、目标函数等遗传算法相关参数。
2)根据应变模态振型,判断是否可以生成初始种群,若不能则需对种群进行非支配排序、选择、交叉、变异,直至生成初始种群。
3)利用混合交叉算子、变异算子生成子代种群。
4)合并子代种群与父代种群,对超出约束部分进行再处理。
5)判断是否可以生成子代,若不能则需要进行拥挤度计算选取合适的个体作为新父群。
6)计算适应度值,保留策略生成下一代种群。
7)判断是否满足目标函数最小,若满足则输出最优解,若不满足则继续迭代。
3.2 目标函数设置
高精度模态坐标是进行应变重构的前提,模态置信(Modal Assurance Criterion,MAC)矩阵的非对角线元素越小,模态振型向量独立性越高,所对应的模态坐标的精度就越高。MAC 矩阵可表示为
式中,ϕi和ϕj分别为第i和第j个应变模态振型。据此设置第一个目标函数[16],即
矩阵的稳定性可以用其条件数来表示,条件数越小,矩阵越稳定。应变-位移转换矩阵越稳定,则其抗干扰能力越强,因此第二个目标函数为
在ANSYS workbench 有限元仿真中,由于网格划分较小,导致某些网格的模态振型具有相似的模态特性,在相同载荷下会产生形同的响应,因此选取模态相关性小的位置点[17],即较小的协方差。用c表示应变模态振型的相关系数,因此第三个目标函数为
依据此三个目标函数,输出最优传感位置点。
3.3 利用最优位置点重构结果
将FBG 粘贴至镍钛合金板最优位置上,将镍钛合金板分别固定在曲率半径为200 mm、180 mm、160 mm 的圆弧上。根据测得的中心波长拟合得到FBG 应变,代入到应变-位移转换矩阵中得到重构位移,并与K-means++聚类方法重构结果做对比,结果如图7 所示。

图7 不同曲率半径圆弧情况下重构结果Fig.7 Deconstruction results in the case of circular arcs with different curvature radii
误差大小通过计算均方根误差和最大误差来体现。均方根误差公式为
式中,N为重构位置点个数,Sr为物体的测量位移,Se为物体的计算位移。最大误差公式为
式中,MAX 为求取最大值函数。
两种方法的均方根误差和最大误差如表2 所示。
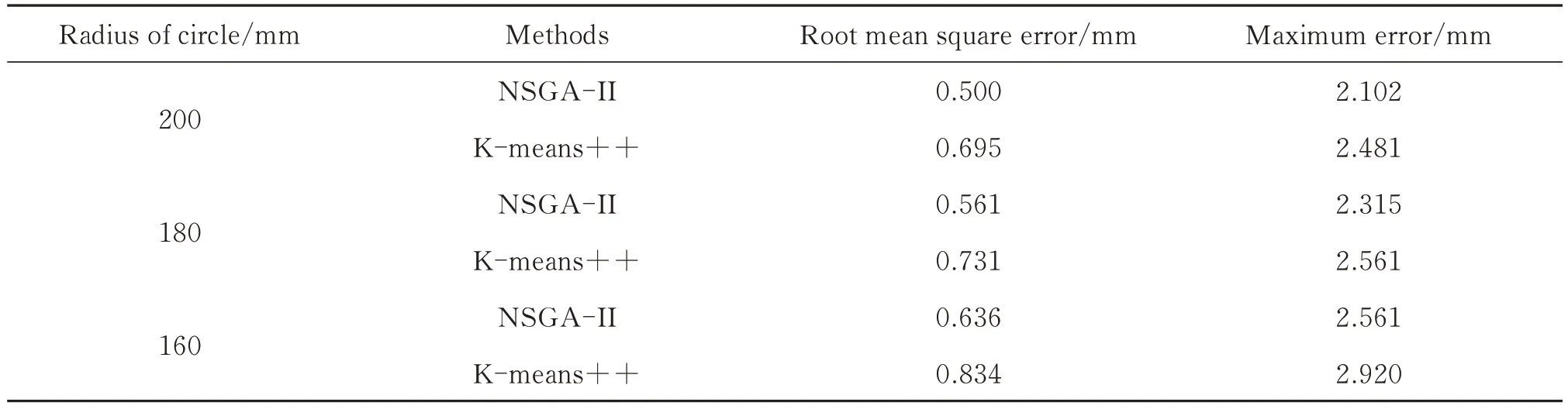
表2 不同方法重构误差对比Table 2 Reconstruction errors of different methods
传统单目标优化算法中,利用K-means++算法重构误差最小,而利用NSGA-II 算法所选取的传感点进行重构,相较于传统单目标优化算法均方根误差减小了30%,最大误差减小了15%。实验结果表明使用NSGA-II 算法能在一定程度上提高重构精度。
4 基于PSO-RBF 的三维重构误差补偿
4.1 PSO-RBF 算法
RBF 神经网络的原理是利用径向基函数作为隐含层单元的“基”构成隐含层空间,隐含层对输入向量进行变换, 将低维空间的输入数据映射到高维空间,使得在低维空间线性不可分的问题在高维空间得以解决,图8 为RBF 神经网络模型结构。
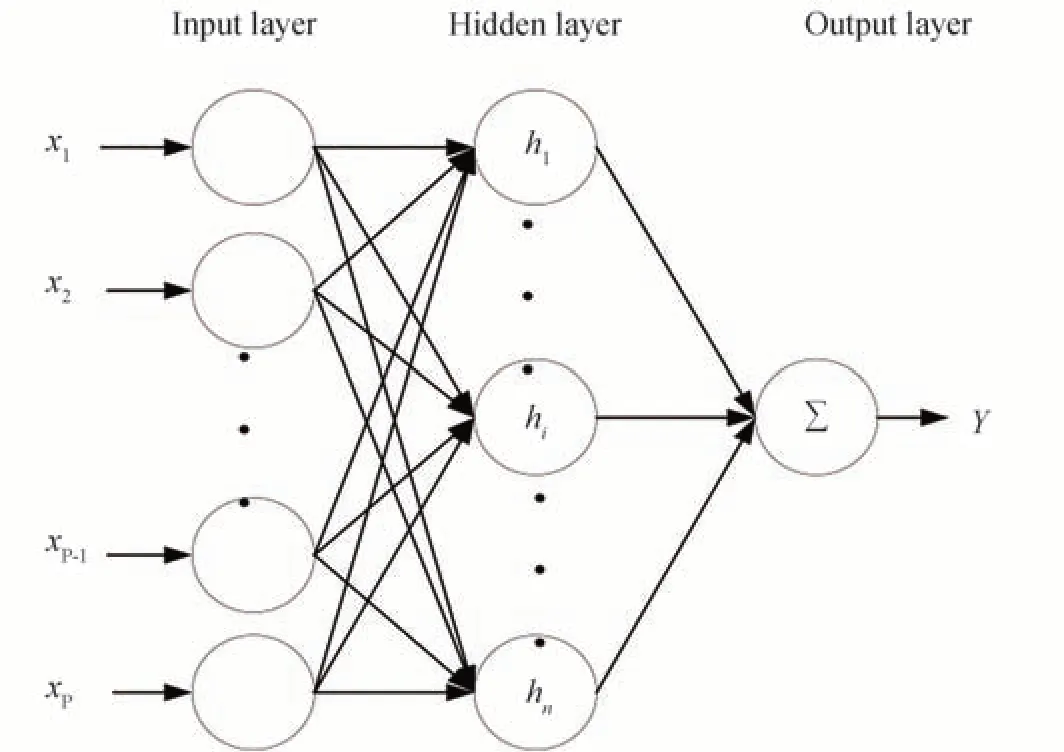
图8 RBF 神经网络模型结构Fig.8 RBF neural network model structure
在径向基神经网络中,高斯中心的位置必然位于输入样本之间,高斯宽度的最大值也要尽量小于样本的最大差值,径向基神经网络的权值和阈一般不超过输出理想值[18]。粒子群优化RBF 神经网络算法的主要方法是用粒子群算法搜索RBF 神经网络算法中关键参数的全局最优值。在粒子群优化径向基神经网络中,径向基神经网络的参数直接对应粒子群的位置向量,因而对粒子群的位置向量提出策略
式中,P、Q分别为输入数据和理想输出数据,W(j)为粒子群的位置向量,n为样本长度,K为粒子数。图9为PSO 优化RBF 神经网络算法流程。

图9 PSO-RBF 流程Fig.9 PSO-RBF flow chart
4.2 误差补偿结果
将镍钛合金板弯曲成曲率半径为200 mm 的圆弧时得到的重构位移数据和重构误差数据作为数据集输入神经网络,其训练集、验证集和测试集的划分比例为6∶2∶2,由此得到重构误差与重构位移的拟合关系,实现对重构误差的预测。利用训练的网络对弯曲曲率半径为180 mm 和160 mm 两种情况误差补偿,并与实际测量结果和无补偿重构结果做对比,如图10 所示。形状重构结果如图11 所示。均方根误差与最大误差如表3 所示。

表3 误差补偿后重构误差对比Table 3 Reconstruction errors after error compensation
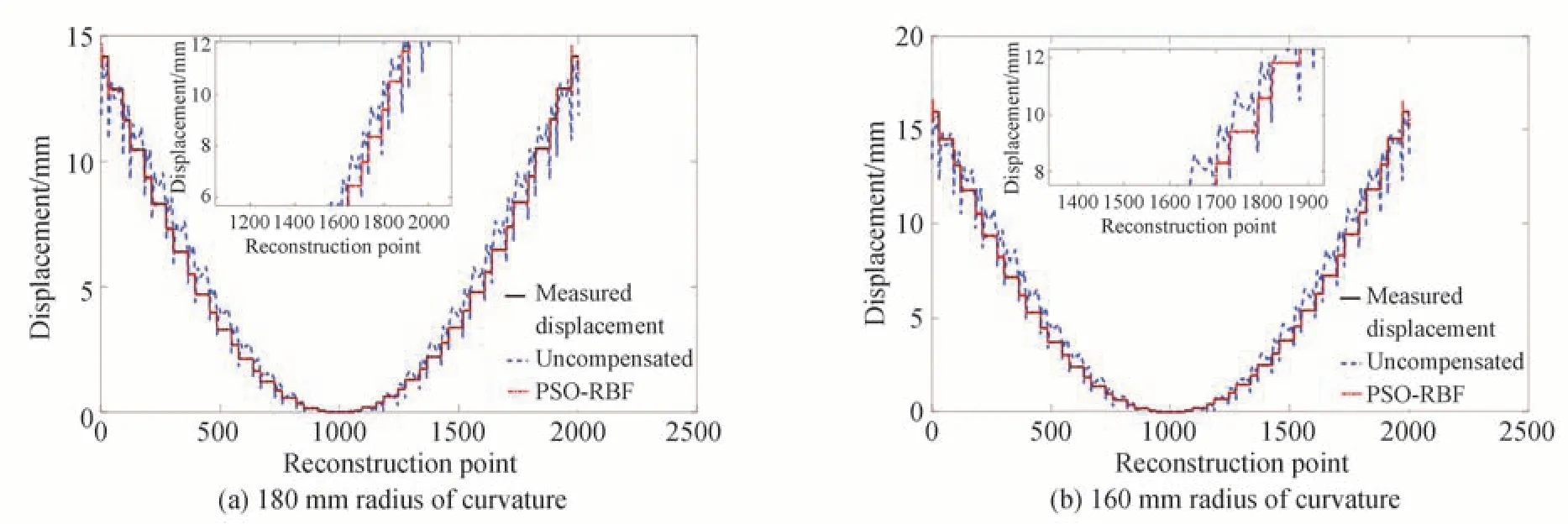
图10 不同曲率半径圆弧情况下位移重构结果Fig.10 Displacement reconstruction results in the case of arcs with different curvature radii
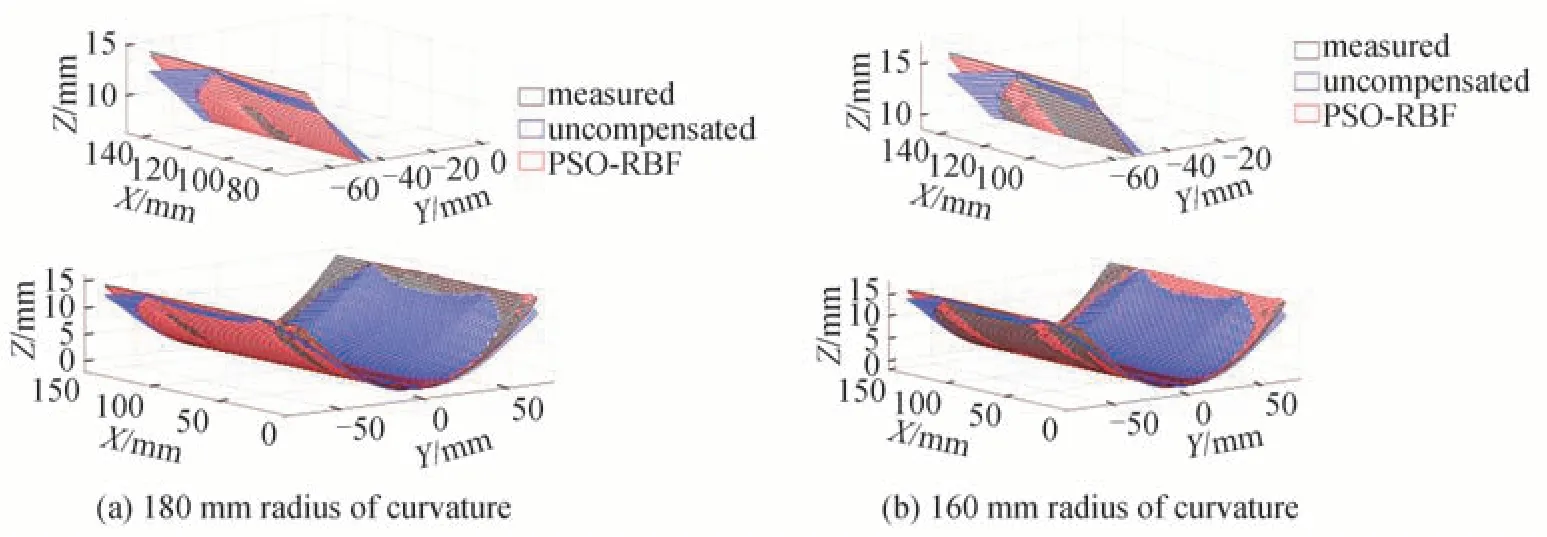
图11 不同曲率半径圆弧情况下形状重构结果Fig.11 Shape reconstruction results in the case of circular arcs with different curvature radii
PSO-RBF 神经网络算法对误差补偿后的重构效果有了很大的改善,均方根误差减小了90%,最大误差减小了70%,最大相对百分比误差仅为5%。实验结果表明采用PSO-RBF 神经网络算法拟合模态法误差可以实现高精度三维形状传感,对结构形状监测具有重要意义。
5 结论
本文提出了基于NSGA-II 算法的结构重构方法,通过设计目标函数实现应变点测量位置的优化,在镍钛合金板弯曲不同曲率情况下,通过测量应变实现结构形状重构,相比于单目标优化算法均方根误差减小30%,最大误差减小15%。利用PSO-RBF 神经网络算法拟合误差及重构位移的关系,补偿重构结果,相比于无补偿时均方根误差减小90%,最大误差减小70%,最大相对百分比误差为5%。通过优化传感位置点,合理配置传感点资源,可以在较低成本内实现高精度测量。此外,由于仿真建模与实际结构的物理参数有所差别,导致重构算法存在固有误差,可通过优化仿真模型进一步减小误差。该方法有望对模态法实现结构高精度监测提供理论依据和设计参考。本算法没有考虑温度影响,不能实现温度与应变的解耦,后续研究可将温度作为一个变量分析其对重构结果的影响。
猜你喜欢
力学与实践(2022年5期)2022-10-21
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
兰州交通大学学报(2022年2期)2022-04-26
特种结构(2019年2期)2019-08-19
电子制作(2018年23期)2018-12-26
中国自行车(2018年8期)2018-09-26
四川冶金(2017年6期)2017-09-21
当代化工研究(2016年9期)2016-03-20
山西建筑(2015年14期)2015-06-05