广义Gamma 分布弱湍流环境含指向误差串行中继水下无线光通信系统误码性能分析
2024-03-16 07:12王懿旭李岳衡黄平居美艳
光子学报 2024年2期
王懿旭,李岳衡,黄平,居美艳
(河海大学 计算机与信息学院,南京 211100)
0 引言
海洋环境中普遍存在的吸收与散射效应,湍流衰落以及指向误差等都会对水下光信号的传输造成严重的衰减,进而大幅降低水下无线光通信(Underwater Wireless Optical Communication, UWOC)系统的有效传输距离和通信质量[1-2],故而有必要对这些因素尤其是其综合影响加以深入研究。
文献[3]采用纯蒙特卡罗(Monte Carlo,MC)数值仿真法研究了海洋环境吸收与散射效应对系统误码率的影响。文献[4]研究了UWOC 在点对点(Point-to-Point, P2P)通信架构和大范围湍流环境中系统的平均误码率和中断概率。文献[5-6]则分别研究了在强、弱湍流情形下,P2P-UWOC 的平均误码率和系统容量。文献[7-11]将研究对象推广到多入-多出(Multi-Input Multi-Output, MIMO)模式的UWOC。不过,在这几篇涉及湍流衰落的论文中,都通过简单移植大气自由空间光(Free Space Optical, FSO)环境的湍流模型来描述UWOC 的湍流效应,其中弱湍流普遍采用Lognormal 分布、强湍流采用Gamma-Gamma 分布。然而,经过国外一些研究学者近年来开展的一系列有关水下环境湍流效应统计特性模拟的实验室测量和数据拟合实验发现[12-14],传统适用于大气FSO 环境湍流效应的Lognormal 分布和Gamma-Gamma 分布并不能很好地拟合海洋环境中因温度、盐度、气泡等因素导致的湍流衰落,且存在较大误差。另外,上述文献所研究的链路结构普遍采取的是点对点或者点对多点的直传形式,无法支持长距离通信。文献[15-16]研究了海洋湍流环境中串行和并行中继UWOC 系统的中断概率和误码性能。但是,文献[15]仍然采用Lognormal 统计分布来模拟海洋湍流,且仿真中未能全面体现无衰落信道冲激响应(Fading Free Impulse Response, FFIR)导致的符号间干扰(Inter-Symbol Interference, ISI)对系统性能的影响;文献[16]虽然采用比较合理的指数-广义Gamma(Exponential Generalized Gamma, EGG)模型,但基于该模型的性能分析会涉及多变量的高等超越FoxH 函数,导致相应的理论分析与数值计算都异常复杂。文献[17-18]分别分析了混合陆地射频(Radio Frequency, RF)-UWOC 的两跳中继系统的中断概率、误码率和信道容量,以及混合了RF-FSOUWOC 的三跳中继系统的中断概率和误码率性能,但同样没有考虑多径传输效应的影响。此外,在UWOC这一方向中,现阶段综合考虑含指向误差和湍流效应的系统性能分析方面的研究较少,比如文献[19-20]分别研究了零视轴指向误差下,P2P 结构和MIMO-UWOC 系统的信道容量与误码率,但它们仍然采用的是Lognormal 和Gamma-Gamma 分布模型来模拟海洋中的弱、强湍流效应,且没有考虑多径效应引起的ISI 的影响。
本文建立一种综合考虑了FFIR 隐路径损耗和多径效应、广义Gamma 分布(Generalized Gamma Distribution, GGD)弱湍流以及零/非零视轴指向误差的聚合衰落接收信道模型,基于此模型利用高等超越Meijer-G/Whittaker 函数推导出混合衰落串行中继UWOC 系统平均误码率的理论闭型表达,随后利用MC数值仿真验证所得系统平均误码率理论表达式的准确性,并考察不同核心参数对系统性能的影响。
1 信道衰落及系统模型
1.1 GGD 湍流衰落模型
大量实验测试数据表明[13-14],三参量的GGD 模型特别适合模拟海水中由于存在温度和盐度的梯度而导致的弱湍流效应,可以有效克服传统诸如Lognormal 分布、Gamma 分布、Weibull 分布等模型拟合实测的弱湍流衰落概率密度函数(Probability Density Function, PDF)统计特性不准确的缺点;此外,比较复杂的五参量EGG 模型虽然也可以通过5 个参量来模拟海洋弱湍流(根据文献[12]给出的拟合参数表格,需系统调整5 个非零参变量来拟合测试数据,且基于EGG 模型推导相关性能需涉及复杂的多变量FoxH 函数[21]),但显然GGD 模型具有更加简洁的参数表示形式和灵活度,将为后续的系统核心性能指标分析带来便利。因此,拟采用GGD 模型来模拟海洋环境的弱湍流效应,其概率密度函数表达式为[13]
式中,ha为链路所经历的GGD 弱湍流衰落的随机损耗系数,a,c为形状参数,b为尺度参数,Γ(·)代表伽马函数。为了方便后续参数计算和仿真,将湍流衰落系数归一化,即令E[ha]=1,则根据对接收光强闪烁指数的定义=(E[h2a]-E2[ha])/E2[ha],以及归一化约束,不难获得GGD 统计模型中a,b,c三个参数与闪烁指数之间的计算关系为
由式(2)~(3)可见,在预先固定形状参数c的前提下,可以通过确定表征湍流强度大小的闪烁指数σ2I的方式来获取GGD 模型的其他两个参数a和b。
1.2 系统模型
考虑一具有N个中继节点的串行中继UWOC 通信系统,其结构如图1 所示,其中S代表源节点,D代表目标节点,Ri代表第i个串行中继节点。假设在多跳传输的过程中,当前节点只接收前一节点的传输信号,且每个中继节点都采用译码-转发工作模式。又假设传输的信息采用简单的开-关键控(On-off Keying,OOK)调制方式,则第i个中继节点处的传输数据序列为,其中∈{0,1}为第i个节点处的第k个时隙的OOK 传输符号,P(t)=2Pb·M(t)为幅度值为2Pb的脉冲成型波形,Pb为OOK符号的平均发射功率,M(t)为仅在区间[0,Tb]内取值的单位脉冲成型函数,Tb为OOK 符号的符号宽度。因此,第i个中继节点处接收到的时域接收信号y(i)(t)可以表示为[22]

图1 串行中继UWOC 系统结构示意图Fig.1 Schematic diagram of serial-relayed UWOC systems
式中,h(i)(t)=h(i)·h(i)0(t)为对应第i跳路径上的复合信道冲激响应时域波形,h(i)0(t)为对应第i跳的无衰落冲激响应(FFIR)函数,h(i)为对应第i跳的复合衰落信道系数(包括湍流衰落效应和指向误差等);n(t)为加性白高斯噪声过程,其每一时间采样点噪声的均值为0,方差为σ2=4KTB/RL,K、T、B、RL分别表示玻尔兹曼常数、开尔文温度、滤波器带宽和系统的负载电阻值;Γ(i)(t)=P(t)*h(i)0(t),*表示卷积算子。
不考虑干扰抵消技术而仅考虑匹配滤波处理,则节点i处接收机在第0 时隙输出的积分电流r(i)b0可表示为
式中,b(i-1)k∈{0,1},k=0,-1,…,-L为对应0 时隙发送符号b(i-1)0的前L个干扰符号,L是信道记忆长度;(t)dt是匹配滤波器输出的电流波形信号,R是光电探测器的响应度R=ηq/hf,η、q、h、f分别为光电探测器量子效率、电子电荷、普朗克常数和水中光频率;表示由信道时间色。需要注意的是,γ(s)i项包含了由无衰落信道冲激响应所体现的路径损耗部分,即信道的路径损耗是以隐性的形式体现在FFIR 中。另外,在后续有关点对点单跳链路性能分析的数学推导过程中,为了令符号描述简洁,在不引起歧义的情形下省略了一些符号,比如h(i)、γ(s)i、γ(I,k)i、b(i-1)k、r(i)b0等中表示节点信息的上下标符i。散引起的符号间干扰;υTb是接收机的积分噪声,其均值为0,方差为
2 湍流环境含视轴指向误差串行中继UWOC 系统误码率分析
2.1 点对点单跳链路混合衰落信道PDF 推导
2.1.1 GGD 弱湍流环境含零视轴指向误差混合衰落PDF 推导
建立一种适合于UWOC 的混合衰落信道模型,该模型综合考虑了海洋环境因存在吸收与散射效应引起的多径传播路径损耗hl、发射机与接收机之间由于错位现象导致的指向误差hp,以及受温度、盐度等随机变化导致的湍流损耗ha。其中,路径损耗hl以隐性的方式体现在匹配滤波器的积分项γ(s)和γ(I,k)中,可用MC 方法模拟获得的FFIR 计算获得。因此,只需考虑湍流损耗ha以及零视轴指向误差hp引起的衰落h,即
h=hahp(6)
式中,ha即为GGD 弱湍流衰落的随机损耗系数,其PDF 由式(1)获得。而入射光波在距离光源Z处、径向位移为r的接收器处收集的功率可近似为[19]
式中,A0=[erf(v)]2表示径向位移r=0 时的收集功率比例,v是孔半径与光束宽度比值,erf( ·)为误差函数,w2zeq为等效光束宽度,wz为距离Z处的光束腰。由于径向位移的水平位移与垂直位移两个分量均可视为独立的正态分布随机变量,故径向位移误差r的统计特性可由Rayleigh 分布来模拟,经推导与计算可得hp的概率密度函数PDF 为[19]
式中,γ=wzeq/2σs,σs为接收机的抖动离差。
因此,混合衰落信道的联合概率密度函数可以表示为
进一步根据公式(式2.24.2.3[21]),对照参数进行计算,式(10)可简化为
式中,整数因子l1和k1满足l1/k1=c(c为GGD 分布的形状参数)表示k'维矢量。令以简化式(11),则GGD 弱湍流环境含零视轴指向误差混合衰落信道的联合概率密度函数可最终表示为
2.1.2 GGD 弱湍流环境含非零视轴指向误差混合衰落PDF 推导
在传统零视轴指向误差的基础上,文献[23]给出了一种更加复杂的非零视轴指向误差数学模型,其物理含义为:光源除了以相等的概率在垂直于光束传播方向的平面内左右和上下方向摇摆外,还存在一个初始的指向偏差,即一开始的发射机发射光束并没有准确指向接收机,落在接收机平面内的初始光斑距接收机原点存在一固定偏差值s,则接收端径向位移误差r的PDF 可由Rice 分布来进行建模,即
式中,s为初始视轴位移,I0(·)为第一类零阶修正贝塞尔函数。
根据式(7)和(13),可得GGD 湍流环境中含非零视轴指向误差的衰落系数hp的PDF 为
式中,γ=wzeq/2σs,为等效波束宽度和抖动方差之间的比率,通常作为衡量指向误差效应严重程度的标准。
根据式(1)和(14)不难得出GGD 湍流环境下含非零视轴指向误差的混合衰落信道系数h的联合PDF 为
根据双重e 指数的泰勒展开公式
可将式(16)化为
借鉴文献[23]中的推导过程,即利用公式(式 6.643.2[24])
式中,u、δ、v'、ε为待确定的常数变量,Mu,v( ·) 为Whittaker 函数,且有
对比式(19)参数,则式(18)可化简为
2.2 混合衰落信道中继UWOC 系统单跳误码率分析
2.2.1 零视轴指向误差情形中继UWOC 系统单跳误码率分析
在OOK 强度调制-直接检测机制下,为获得最小系统检测误码率(Bit Error Rate, BER),其最优判决门限的阈值ID根据推导可以定为[25]
式中,σ0,σ1分别为传输比特为“0”和“1”时的积分噪声的离差分别为传输比特为“0”和“1”时的平均接收电流值。
以正-本征-负结(Positive-Intrinsic-Negative, PIN)接收机为例,有σ0=σ1=σTb,则根据式(5)和(21)可得最佳判决阈值为
在此判决门限下,发送符号“1”而错判为“0”的条件错误概率为
式中,高斯Q函数同理,发送“0”而错判为“1”时的条件错误概率为故在等概发送OOK 符号并已知信道衰落h和干扰符号bk的前提下,平均接收错误概率为
可见,该条件误码率公式与干扰符号bk无关。进一步,令Cb0=γ(s)/2σTb,则GGD 弱湍流环境含零视轴指向误差条件下,中继UWOC 系统统计平均了复合衰落因素h的平均单跳BER 的表达式可写为
根据互补误差函数与Q函数之间的关系,即erfc(x)=2Q( 2x),以及公式(式 8.4.12.2[21])
可将式(25)化为
根据定积分公式(式2.24.1.1[21]),式(27)可最终化为
式(28)即为GGD 弱湍流环境中继UWOC 系统含零视轴指向误差单跳误码率闭型表达计算式。
2.2.2 非零视轴指向误差情形中继UWOC 系统单跳误码率分析
类似2.2.1 节的最优判决门限选择和条件平均BER 公式的推导,根据式(24)和(20),GGD 弱湍流环境含非零视轴指向误差的平均单跳误码率可以表示为
根据Q函数与互补误差函数的关系等式:2Q( 2x)=erfc(x),以及互补误差函数与误差函数之间的关系:erf(x)=1-erfc(x),式(29)可进一步化为
利用定积分公式(式 6.281.1[24]),通过对照参数计算,可将式(30)化为
式(31)即为GGD 弱湍流环境中继UWOC 系统含非零视轴指向误差的单跳误码率闭型计算表达式。根据高等数学中有关级数收敛性判定准则,不难证明式(31)中的无穷和项是收敛的,限于篇幅原因,此处不再提供具体证明过程。
2.3 混合衰落信道下中继UWOC 系统端到端误码率分析
如图1 所示,假设节点0 为源节点,而节点i(i=1,2,…,N+1)是多跳通信的目标节点,则在OOK 强度调制-直接检测的情况下,当节点0 向节点i通过中继形式传输数据时,存在两种可能导致节点i处出现接收错误的情形,即:1)相较于节点0 的原始发射数据,节点i-1 处接收的数据正确,而第i跳的传输出现错误;2)节点i-1 处接收的数据出现错误,而第i跳传输却是正确的。假设各跳链路之间的信道相互独立,则中继系统OOK 符号在第i个节点的端到端误码率可由迭代计算公式表示为
式中,Pi表示信号从节点0 传至节点i的符号错误概率;P(i)be为节点i-1 至节点i之间单跳的符号错误概率,分别由式(28)和(31)根据指向误差类型进行计算。
因此,GGD 弱湍流环境含指向误差下中继UWOC 系统端到端误码率表达式为
假设每一跳都具有相同的传输链路距离,且传输环境如水质、湍流效应、发射与接收机配置等也相同,则所有单跳链路必然都有相同的平均误码率Pbe,则不难根据式(33)得到该情形下中继系统端到端的误码率具形式为
显然,对i=n而言,其端到端误码率是一个首项为a1=Pbe,公比为q=1-2Pbe的n项等比数列的和。利用等比数列求和公式Sn=a1(1-qn)/(1-q)可将一般式(34)简化为
2.4 数值仿真与分析
通过计算机数值仿真包括FFIR 隐路径损耗与多径效应、GGD 海洋弱湍流以及含零/非零视轴指向误差等混合衰落因素的串行中继UWOC 系统的误码性能。为了获得式(4)中所需的无衰落信道冲激响应FFIRh0(t) ,首先基于文献[26-27]的工作,搭建了一个适合于UWOC 系统的信道冲激响应仿真平台,通过MC 数值仿真来获取不同传输距离下的信道传输特性。其中FFIR 及后续系统BER 仿真所需的一些核心系统参数如表1 所示[14,26-27]。
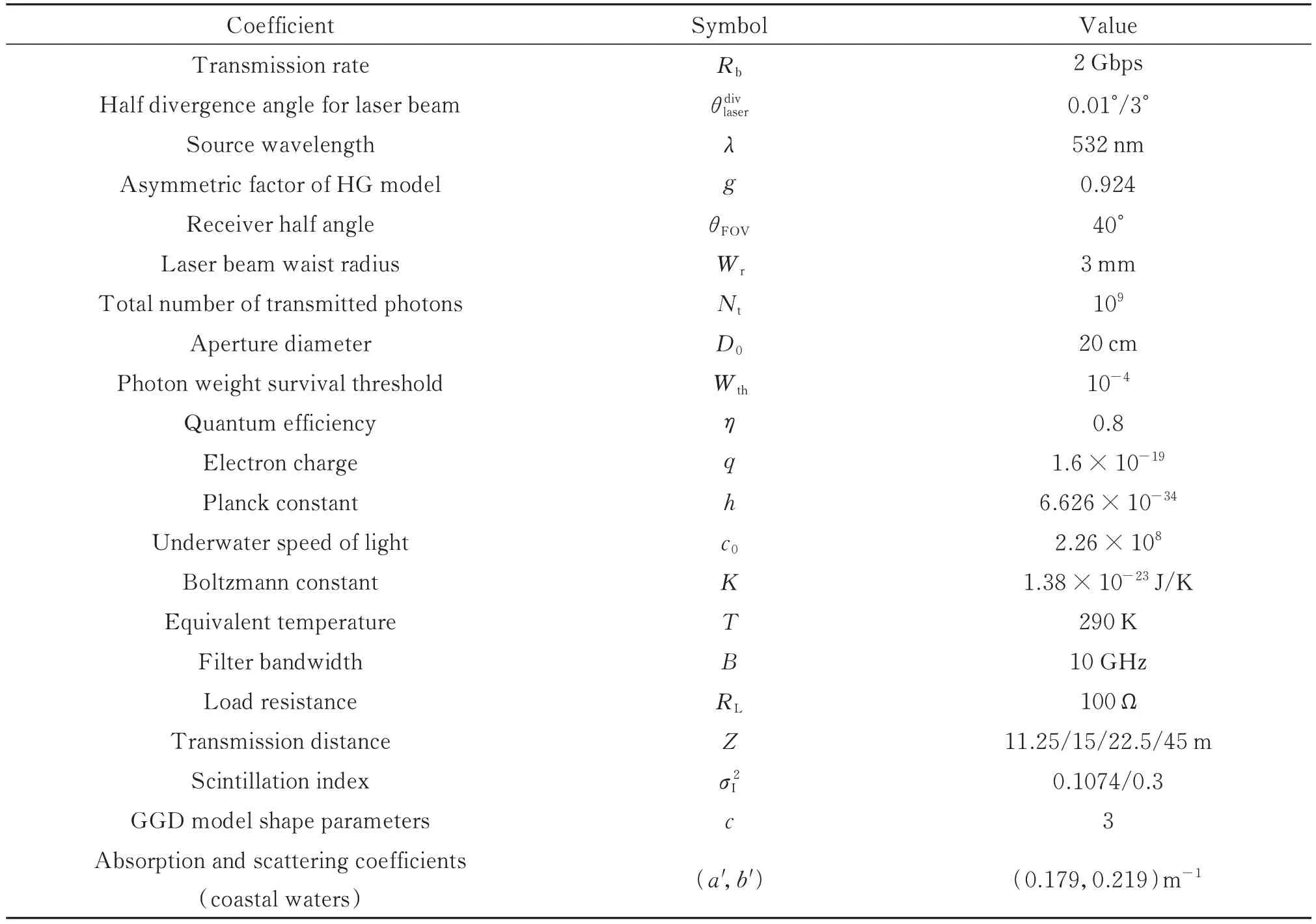
表1 FFIR 及系统BER 数值仿真主要参数[14,26-27]Table 1 Main parameters for numerical simulation of FFIR and system BER[14,26-27]
图2 给出了近海海岸水质中,采用Gauss 波束激光源,当光束发散角分别为0.01°和3°时,UWOC 链路在点对点传输距离为11.25 m、15 m、22.5 m 以及45 m 时的FFIR 的仿真结果。可以看出:随着传输距离和激光光束发散角的增加,归一化接收量化强度在逐步降低的同时时间色散也逐渐增大,即多径传输效应更加严重。这表明光源工作于大发散角θ和长通信距离Z的情形下,传输信道中的多径效应对信号的传输将产生极大的影响,即如果将仿真结果作为FFIR 衰落系数并通过匹配滤波器将其作用在接收信号时,必须要考虑ISI 的影响。此外,对比同一光束发散角下链路距离加倍时(如11.25 m 和22.5 m)接收机的FFIR 数据可以看出,其最大归一化接收光强间至少相差两个数量级,这说明,如果在中继节点等距布设的情形下,完全可以忽略中继传输过程中某中继节点对后续节点,比如Ri和Ri+1之间的互扰影响,进而简化整个仿真的流程和问题的分析。
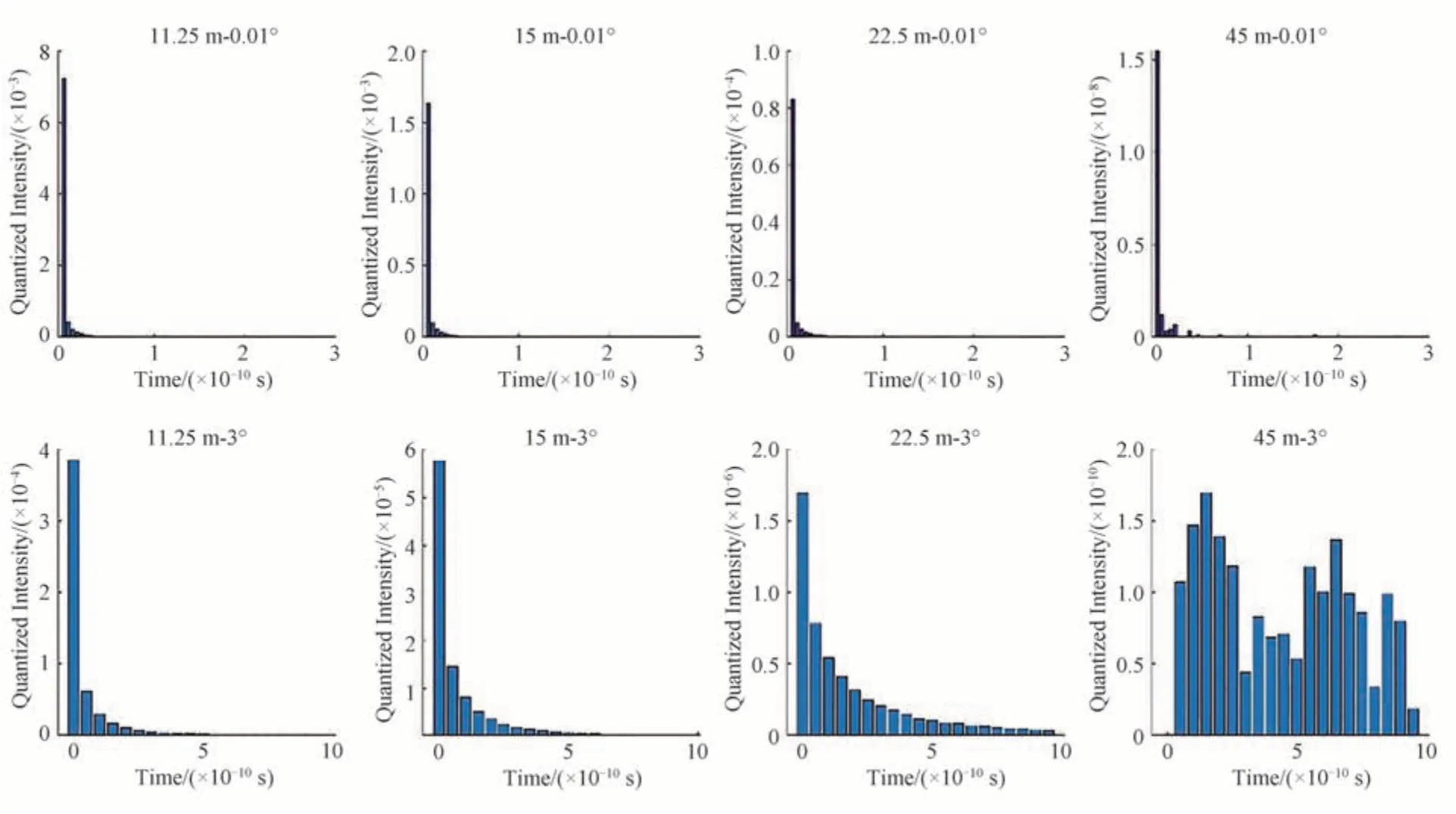
图2 近海海岸水质平行及扩散激光源UWOC 链路FFIR 仿真示例Fig.2 FFIRs of laser-based collimated and diffusive UWOC links in coastal waters
分别在零视轴和非零视轴这两种典型指向误差工作环境中,综合考虑隐路径损耗与多径效应、GGD 弱海洋湍流以及视轴指向误差等复杂信道衰落因素作用下,核心系统参数的选择对串行中继UWOC 系统平均误码性能的影响,给出相应的MC 数值仿真来验证推导所得串行中继UWOC 系统误码率理论表达式的准确性。
2.4.1 零视轴指向误差情形中继UWOC 系统BER 数值仿真与分析
图3 和图4 展示了在激光光束发散角θ分别为0.01°和3°时,串行中继UWOC 系统在不同的点对点链路传播距离d0以及不同抖动离差σs情形下,系统平均误码率理论值和MC 仿真值随节点每比特平均发射功率变化曲线。对比两组仿真结果可以清晰地观察到,增大激光光束半发散角θ会导致更大的FFIR 时延扩展,进而引入不可忽略的符号间干扰ISI,导致UWOC 系统的误码性能急剧恶化。
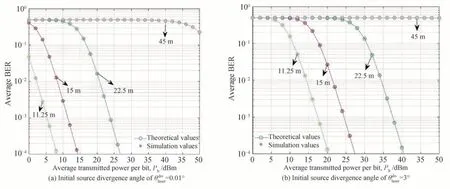
图3 不同节点数目下,串行中继UWOC 系统误码率理论值与仿真值随每比特平均发射功率变化曲线(σs=10 cm,Rb=2 Gbps,r=10 cm,=0.107 4)Fig.3 The theoretical and simulated BER values of the serial-relayed UWOC systems varying with the average transmission power per bit under different node numbers (σs=10 cm,Rb=2 Gbps,r=10 cm,σ2 I =0.107 4)
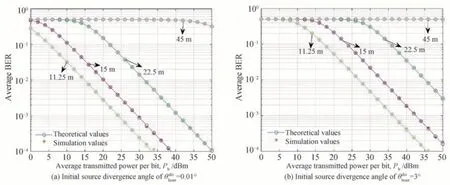
图4 不同节点数目下,串行中继UWOC 系统误码率理论值与仿真值随每比特平均发射功率变化曲线 (σs=20 cm,Rb=2 Gbps,r=10 cm,=0.107 4)Fig.4 The theoretical and simulated BER values of the serial-relayed UWOC systems varying with the average transmission power per bit under different node numbers (σs=20 cm,Rb=2 Gbps,r=10 cm,σ2 I =0.107 4)
具体来说,图3(a)和(b)展示了激光光束发散角θ分别为0.01°和3°时,GGD 弱湍流环境下,固定接收机孔径r=10 cm,抖动离差σs=10 cm,传输速率Rb=2 Gbps 时,不同点对点链路距离d0对系统平均误码率随节点每比特发射功率变化曲线的影响。从仿真结果可以看出:在总传输距离固定为45 m 的情形下,随着中继节点数N的不断增大(N=0,1,2,3 分别对应图中的d0=45,22.5,15,11.25 m),串行中继UWOC 系统的误码率迅速降低,这是由于同比条件下中继链路距离的减小导致FFIR 路径损耗也迅速减小的结果;不过,随着光源发散角扩大导致的FFIR 时延扩展的增加(图2 所示FFIR 仿真数据),即ISI 的增强,这种误码率性能方面的改善也有所下降,体现在仿真结果中是在同样发射功率条件下,不同P2P 链路距离所对应的误码率曲线的BER 值恶化明显。此外,当中继节点N=0 时,无论θ值为多少,系统误码率皆非常高。这说明,在近海海岸水质下,即便采用发散角很小的激光源来传输信号,如果不采用中继传输方案,45 m 的直传链路的通信质量基本无法令人接受。相反,引入串行中继节点后,系统误码性能大幅提升,且中继节点数越多,系统误码性能越好。这说明通过采用中继辅助技术可以有效减少路径衰减给信号带来的不利影响,从而实现长距离通信。
图4(a)和(b)展示了在激光光束发散角θ分别为0.01°和3°时,GGD 弱湍流环境中固定接收机孔径r=10 cm,抖动离差σs=20 cm,传输速率Rb=2 Gbps 时,不同点对点链路距离d0对系统平均误码率随节点每比特平均发射功率变化曲线的影响。对比图3(a)和图4(a),或图3(b)和图4(b),可以看出,同样系统参数设置条件下,单独增大指向误差σs同样会比较严重地恶化系统的误码率性能。这是因为指向误差会导致有效落在接收机接收孔径内的光强大幅降低,从而导致系统误码率随发射功率变化曲线右移,即性能变差。图3和图4 的仿真结果表明,光源发散角增大导致的FFIR 时延扩展或者多径传播效应,以及指向误差抖动都会对中继UWOC 系统的误码性能产生比较大的影响。
此外,从图3 和4 还可以观察到,针对复杂衰落串行中继UWOC 系统推导所得的误码率理论闭型表达式计算值与计算机MC 仿真值基本吻合,从侧面验证了所推导的GGD 弱湍流环境含零视轴指向误差串行中继UWOC 系统误码率性能理论分析的准确信与合理性。
2.4.2 非零视轴指向误差情形中继UWOC 系统BER 数值仿真与分析
在非零视轴指向误差情形下,光束中心与光电探测器中心之间的初始固定位移产生偏差(此现象称为非零视轴指向误差),导致系统性能相较于零视轴指向误差的情形进一步下降。因此,除了2.4.1 节所考虑的抖动离差的影响,还需要考虑视轴初始位移s对中继UWOC 系统性能的影响。
图5~7 展示了在激光光束发散角θ分别为0.01°和3°时,串行中继UWOC 系统在不同点对点链路距离d0、不同抖动离差σs以及不同初始视轴位移s下,系统平均误码率理论值和MC 仿真值随节点每比特平均发射功率的变化曲线。从这三组对应的仿真结果可以明显观察到,光源初始发散角和多径传播效应、抖动离差和初始视轴位移都会对中继UWOC 系统的误码性能产生较大影响。
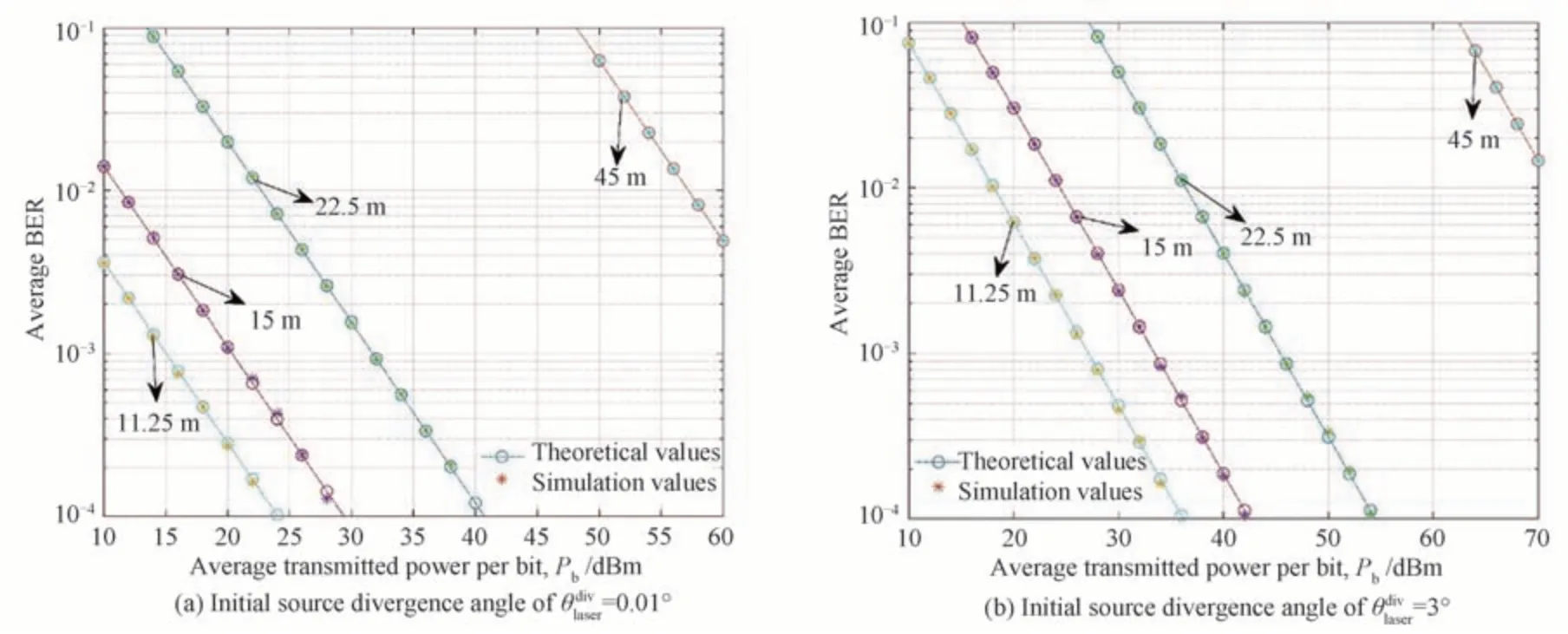
图5 不同节点数目下,串行中继UWOC 系统误码率理论值与仿真值随每比特平均发射功率变化曲线 (σs=2 cm,Rb=2 Gbps,s=5 cm, =0.3)Fig.5 The theoretical and simulated BER values of the serial-relayed UWOC systems varying with the average transmission power per bit under different node numbers (σs=2 cm,Rb=2 Gbps,s=5 cm,σ2 I =0.3)
具体来说,图5(a)和(b)给出了激光光源初始发散角θ分别为0.01°和3°时,GGD 弱湍流环境下,固定接收机孔径r=10 cm、抖动离差σs=2 cm、传输速率Rb=2 Gbps、视轴位移s=5 cm 时,不同点对点链路距离d0对系统平均误码率随节点每比特发射功率变化曲线的影响。从仿真结果可以看出:与零视轴指向误差情形相同,引入中继节点极大地改善了长距离UWOC 系统的误码性能,且系统误码率随中继节点数N的增加而迅速降低;同时,因光源发散角θ的扩大而导致不可忽略的ISI,将使系统在相同的发射功率和中继节点个数N下获得更大的误码率,即恶化了中继节点数的引入对系统BER 性能的改善。
图6(a)和(b)演示了在光束发散角θ分别为0.01°和3°时,GGD 弱湍流环境中,抖动离差增大到σs=7 cm,其他参数仍然保持不变,即接收机孔径r=10 cm、传输速率Rb=2 Gbps、视轴初始位移s=5 cm时,不同点对点链路距离d0对系统平均误码率随节点平均发射功率变化曲线的影响。对比图5(a)和图6(a),以及图5(b)和图6(b)可以看出,在同样系统参数设置条件下,增大抖动离差σs时,因入射光轴发生径向抖动,落在接收机孔径中的高斯光束光强发生由强至弱的随机变化,从而导致非零视轴指向误差情形下UWOC 系统误码率增大即误码性能发生恶化的现象。图5 和图6 的仿真结果表明,与零视轴指向误差工作情形相类似,存在非零视轴指向误差时,FFIR 导致的多径效应,以及指向误差抖动σs都会对中继UWOC系统的误码性能产生较大的影响。
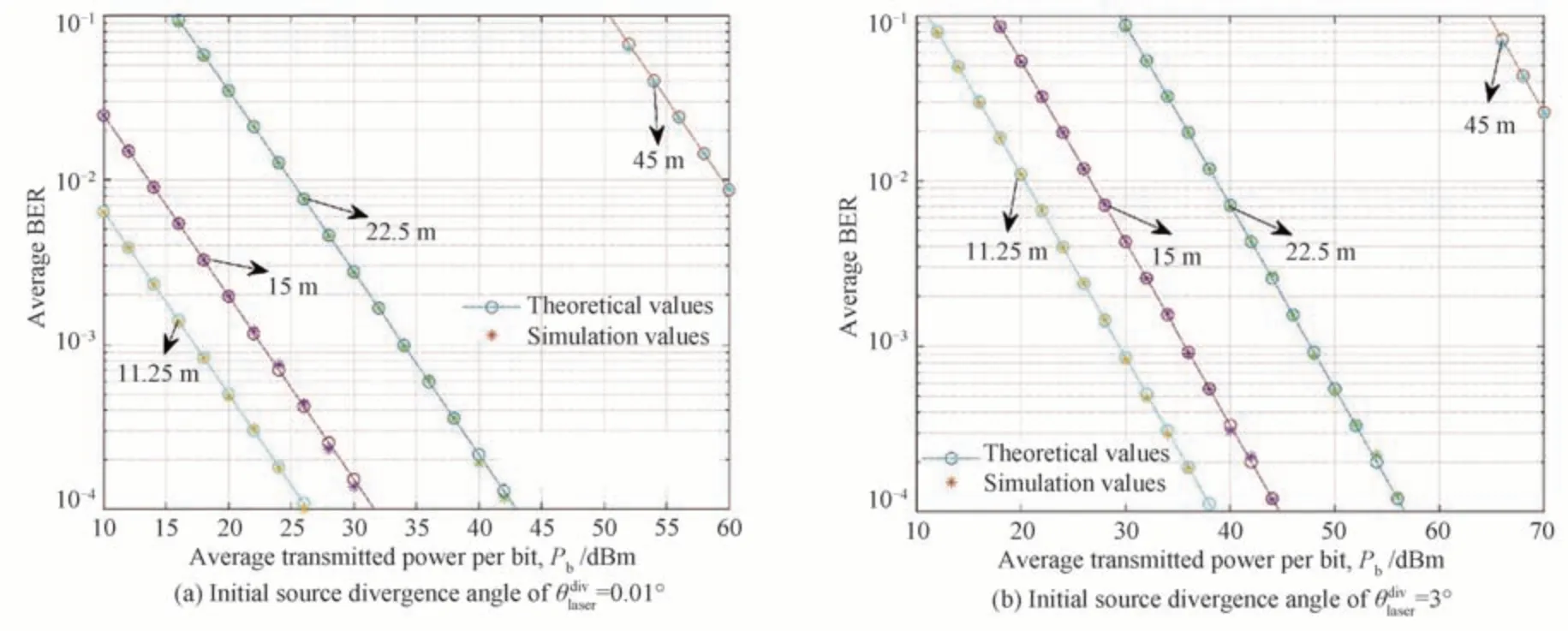
图6 不同节点数目下,串行中继UWOC 系统误码率理论值与仿真值随每比特平均发射功率变化曲线(σs=7 cm,Rb=2 Gbps,s=5 cm,=0.3)Fig.6 The theoretical and simulated BER values of the serial-relayed UWOC systems varying with the average transmission power per bit under different node numbers (σs=7 cm,Rb=2 Gbps,s=5 cm,σ2 I =0.3)
图7(a)和(b)展示了在激光光束发散角θ分别为0.01°和3°时,GGD 弱湍流环境中当固定接收机孔径r=10 cm、抖动离差σs=7 cm、传输速率Rb=2 Gbps,而视轴位移增大到s=10 cm 时,不同点对点链路距离d0对系统平均误码率随节点每比特平均发射功率变化曲线的影响。对比图7(a)和图6(a),以及图7(b)和图6(b)可以看出,同样系统参数设置条件下,随着初始视轴误差s的增大,平均误码率随平均发射功率变化曲线将会进一步右移,说明系统的误码性能随着视轴误差的增大下降。究其原因可明显得到:初始视轴误差s代表高斯波束指向接收机中心点的初始偏移程度,偏移越大,表明高斯光波束在接收机平面内的初始落点与接收机的中心距离越远,加之接收机平面处高斯波束光强的指数衰减特性,落在接收机有限孔径面积内容的光强自然更小,系统的误码性能也会进一步恶化。
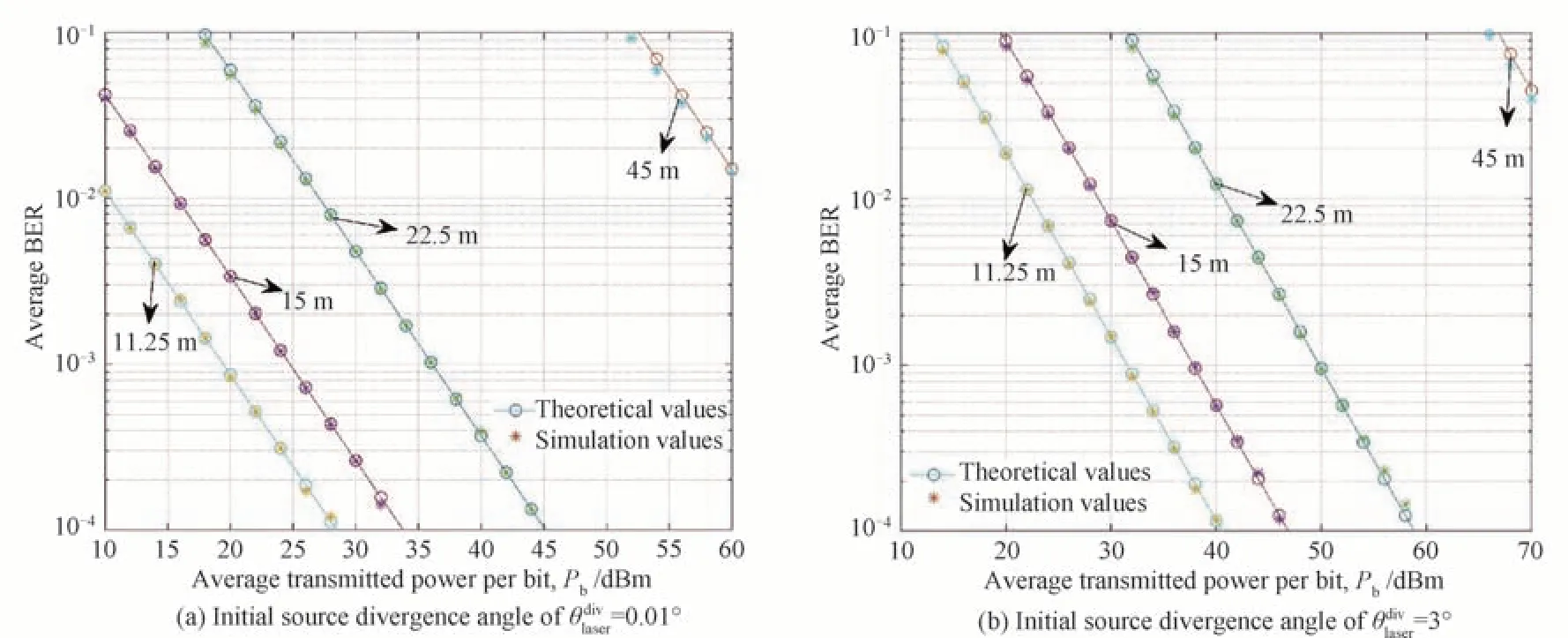
图7 不同节点数目下,串行中继UWOC 系统误码率理论值与仿真值随每比特平均发射功率变化曲线(σs=7 cm,Rb=2 Gbps,s=10 cm,=0.3)Fig.7 The theoretical and simulated BER values of the serial-relayed UWOC systems varying with the average transmission power per bit under different node numbers (σs=7 cm,Rb=2 Gbps,s=10 cm,σ2 I =0.3)
此外,从图5~7 还可以观察到,GGD 弱湍流环境非零视轴指向误差复合衰落信道情形下,所给出的有关串行中继UWOC 系统平均误码率理论计算值与MC 数值仿真结果基本吻合,从仿真层面验证了推导的非零视轴指向误差串行中继UWOC 系统误码率理论表达式的正确性。
3 结论
本文综合考虑了FFIR 隐路径损耗与多径效应、GGD 弱海洋湍流,以及存在零/非零视轴指向误差的聚合衰落信道中,串行中继UWOC 系统的平均误码性能。理论分析与数值仿真结果表明:对于近海海岸水质,既便是采用窄发散角的平行Gauss 波束激光源的发射信号也基本上无法保证45 m 的可靠点对点传输;不过随着中继节点的引入,这种长距离传输则变得可能,并且随着中继节点个数的增加,同样发射功率下误码性能快速下降,表明串行中继系统确实极大地改善了系统的误码性能;而视轴指向误差和湍流的引入,即随着标志着指向误差大小的抖动离差值和初始视轴位移值,以及标志着湍流强度的闪烁指数值的不断增大,中继节点个数下的系统误码率性能亦会下降明显;特别地,光源初始散射角增大导致的FFIR 时延扩展,即ISI,会对系统性能将产生严重影响,在不考虑干扰抵消技术的前提下,当光源初始散射角由0.01°增大到3°时,获取同样误码率需要增大发射功率10~15 dBm,因此UWOC 系统的性能分析不能忽略FFIR 的因素。此外,本文提供的MC 数值仿真值和误码率理论计算值非常吻合,从侧面验证了推导的复杂混合衰落信道下中继UWOC 系统平均误码率理论闭型表达式的准确性,可以为中继UWOC 系统的误码性能分析提供理论计算支撑。
猜你喜欢
雷达与对抗(2022年1期)2022-03-31
航空兵器(2020年5期)2020-12-03
电信科学(2017年6期)2017-07-01
重庆邮电大学学报(自然科学版)(2016年3期)2016-07-04
航天器工程(2015年3期)2015-10-28
应用光学(2015年1期)2015-06-01
电子设计工程(2015年16期)2015-02-27
中国科技纵横(2014年22期)2014-12-15
单片机与嵌入式系统应用(2014年7期)2014-03-24
铁路通信信号工程技术(2014年3期)2014-02-28