大型复杂构件数控焊接机床的设计与分析
2013-12-23 05:47戴飞铭聂晓根
组合机床与自动化加工技术 2013年5期
戴飞铭,聂晓根
(福州大学 机械工程及自动化学院,福州 350108)
0 引言
焊接是应用广泛的加工工艺,手工焊接环境恶劣,对操作者技能要求高且工作强度大,随着技术的进步,焊接加工越来越多地采用自动化焊接装备完成。基于方便送丝,当前自动化焊接装备主要采用焊接机器人。机器人焊接具有工作空间几乎能达到一个球体,可以灵活地完成空间曲线接缝的焊接任务,但是在大行程焊接及复杂形体内部焊接上存在行程不够和容易产生干涉等不足。如某工程车焊接车身,车身长超过2m,焊缝不仅分布在车身的外侧,而且在车身内部也大量存在;又如大型液压油箱,为了提高油箱焊接质量及避免产生焊缝漏油现象,通常选择从箱体内部焊接或内、外接缝同时焊接,焊接机器人都难以适应这些场合的应用。
针对以上问题,以焊接车身和大型焊接油箱为对象,对大行程空间曲线接缝自动焊接的数控焊接装备进行了研究和设计,该机采用五轴运动实现焊枪在三维空间中的平移和旋转,可适应大型复杂构件内、外焊缝的焊接要求。在设计该机床三维模型的基础上,对该机整机和零部件进行了动、静态特性分析和优化设计,保证了机床具有良好的动、静态特性和优良的作业性能,为大行程空间复杂构件数控焊接机床研制提供技术支持。
1 机床总体方案设计与分析
1.1 焊件结构分析与加工运动学分析
如图1 所示分别为某工程车焊接车身和焊接液压油箱及其焊缝分布图,由此可知,其焊缝是由复杂的空间线段或曲线构成,且焊缝分布在焊件的内、外侧。焊接加工中焊枪姿态是影响焊缝成形和焊接质量的一个重要因素,要求焊枪姿态必须满足焊接工艺、无碰撞及运动过程中运动平稳等要求。为了实现这些焊接任务,在机器人焊接复杂构件中通常采用多轴变位机来实现,但大型复杂构件因工件较重不适宜使用多轴变位机,理想的加工方式是焊接中工件保持不动,因此不仅要求焊枪具备平动功能,还要求焊枪具有摆动的功能,以保证焊枪轴线在焊接过程中时刻平分相贯线焊缝上各插补点所在位置的二面角,从而达到焊枪以最佳姿态实现接缝的焊接。
1.2 五联动焊接机床的机械本体设计
根据对焊件特点的分析,为实现焊枪以最佳姿态进行焊接,该数控焊接机床至少需要X/Y/Z/A/C五个轴的运动,为此,设计如图2 所示的机床结构。设计的机床焊枪同时具有三轴平移运动和两轴旋转运动,平移运动装置中的Y、Z 轴的十字滑台安装在龙门式床身的滑座上沿着X 轴方向运动,焊枪头的A、C 轴旋转装置固定连接在Z 轴滑座上沿着竖直上下方向运动,焊枪头作A、C 轴摆动和旋转,机床为3个直线轴和两个回转轴的五轴运动系统。
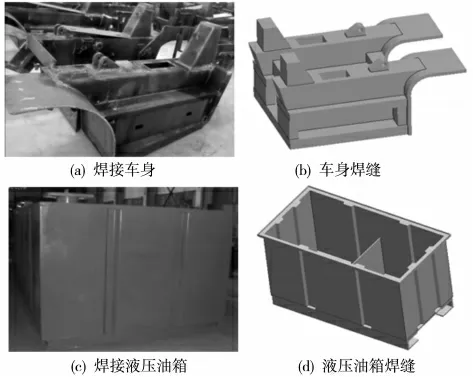
图1 焊件构件及其焊缝模型
如图2 所示的机床,焊接加工过程中,焊件定位后固定不动,焊枪沿X 轴、Y 轴和Z 轴作直线运动,实现空间焊接轨迹的运动,同时,焊枪分别绕A 轴和C 轴作回转运动,以实现焊枪以最佳姿态进行焊接,并避免焊枪与工件产生干涉。焊接过程中,焊枪按照设定的速度运动,其速度大小由焊缝、焊接材料和焊接工艺参数决定,这种结构的机床可实现焊件经一次定位装夹完成工件的完整焊接加工,且定位精度高。同时,结合焊件的规格,兼顾适当的富余量,设计焊接机床X/Y/Z 轴的工作行程为3000mm/2000mm/1500mmA 轴为-120° ~+120°,C 轴为0 ~360°。C 轴可通过软限位在一定的角度范围,如0 ~400°,这样既能实现整周的连续焊接加工,又可避免线缆和焊丝产生缠绕现象。又根据焊件加工精度及效率,制定数控焊接机床的定位精度为± 0.02/1000mm,重复定位精度为0.02mm,最大直线移动速度为2m/min。
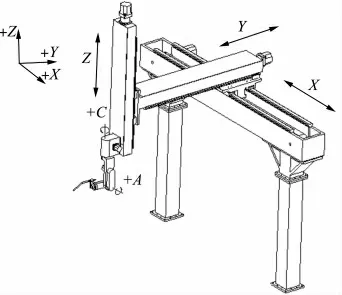
图2 数控焊接机床加工原理图
设计传动结构时综合考虑工作行程、减小摩擦阻力、提高传动精度和刚度、消除传动间隙和减小运动惯量等因素以保证进给运动的传动精度、灵敏度和稳定性。其中X 轴的进给运动采用伺服电机经精密齿轮减速器带动同步带驱动滑座运动;Y、Z 两轴的进给运动均采用伺服电机通过高精度的滚珠丝杠副驱动滑座运动;为保证焊枪运动精度高、平稳、承载能力强,且能够承受较大的倾覆力矩,直线运动轴的导轨均采用直线滚动导轨;A、C 两个回转轴的运动分别采用伺服“电机+同步带”和“伺服电机+涡轮蜗杆”的传动方式,“电机+同步带”结构使得焊枪前臂结构紧密,“伺服电机+涡轮蜗杆”结构具有向自锁性,并能通过软件有效地消除反向间隙,调整磨损间隙,延长传动副使用寿命。在各轴进给机构上采用自动供油方式,定时润滑机床的摩擦面,同时在机构上设置限位装置,满足五轴焊接机床工作安全、可靠性的要求。
2 机床结构静、动态特性分析
为便于进行有限元分析,将在CREO 中建立的机床床身结构实体模型,简化诸如忽略不影响分析结果的工艺孔、过渡小圆角以及凸台等。采用焊接结构床身,材料为:Q235 碳素结构钢,密度ρ=7.8kg/m2,杨氏模量E=200GPa,泊松比μ=0.3。本文选取最薄弱的机床工作状态,即将Y、Z 轴的十字滑台滑移到X 轴横梁的中间位置,且Y 轴滑枕开到行程最大处。图3 所示为由CREO 导入到ABAQUS 中并采用2 阶六面体网格对整个机床结构离散模型。
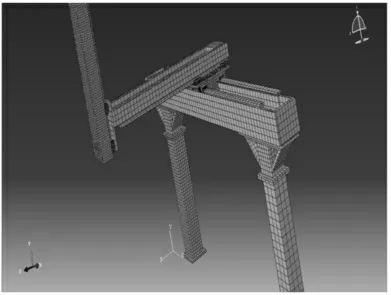
图3 数控焊接机床床身简化离散模型
2.1 静态特性的分析
静力学分析是机床结构静态特性分析的基础,它不考虑结构的惯性与内部阻尼,主要计算在固定载荷作下,结构所承受的应力及应变等长期响应。静态刚度和动态刚度的关系:

其式中,Kj为静刚度系数;Kd为动刚度系数;ξ 为机床阻尼比;Fd为广义动态力的幅值;fd为广义动态压偏量的振幅;ω、ωn为激振频率和固有频率。
由(1)式可得,当ω =0 时,动静刚度相等即:Kd=Kj;当相同频率比λ=ω/ωn条件下,静刚度与动刚度成线性关系。
因此经过以上分析可知,合理提高机床构件的静刚度和固有频率,从而也使提高机床结构的动刚度。本文首先对机床在自身重力作用下整机静态特性进行分析,其机床结构的静态变形云图如图4 所示。
从图4 中可知在重力作用下,机床在Z 轴方向上的最大变形量为0.6mm,不能满足该机床的工艺精度要求,需对影响Z 轴形变的支承结构加以改进。为此,通过加宽Y 轴支座长度和增加Y 轴导轨的厚度,大幅提高了机床焊枪头架的静态刚度,如图5 所示,其在自重下,Z 轴方向上的最大变形量为0.0062mm,并且经过计算分析得出其应力值远低于材料的强度极限应力集中不会影响床身的刚度所以满足其工艺精度要求。
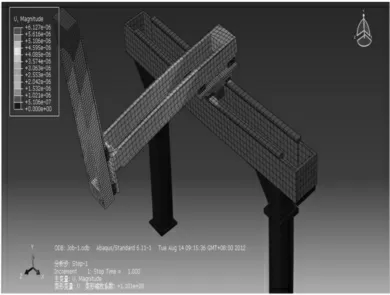
图4 机床的静态变形云图

图5 改进后机床静态变形云图
2.2 模态分析
模态分析用于确定设计结构或机器部件的振动特性,即结构的固有频率和振型,它们是承受动态载荷结构设计中的重要参数。所以在进行机床主体结构模态分析时,可以得到其动态特性即经过计算分析可得系统的固有频率和主振型。
由于作用在机床上的激励力频率一般与最低几阶模态的固有频率才可能存在重合或接近,高阶模态属于局部模态,对于加工质量的影响不大,故只研究机床的低阶模态。应用ABAQUS 仿真分析系统对该机床床身进行了模态分析,得到床身前6 阶固有频率的振型图,得到如图6 所示的振型图和如表1 所示的主振型。

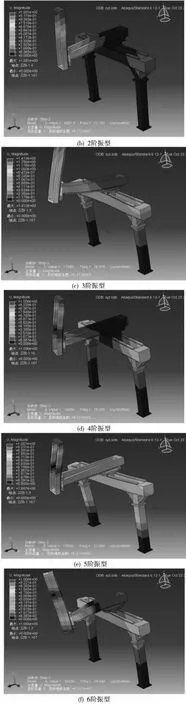
图6 机床模态的1 ~6 阶振型图
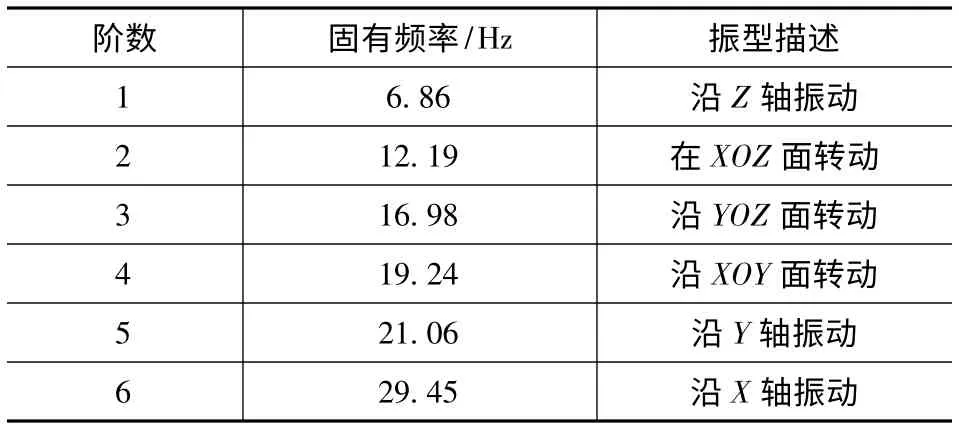
表1 模态分析结果
因此从机床结构的前6 阶模态振动频率(表1)可知,机床的固有频率都在正常工作频率范围以外由此可以看出其动态性能较好。即使该机床的前几阶的固有频率比较低,会在机床的开关机时会出现共振现象,但是在正常工作状态下的激振频率远大于固有频率,因此该现象不影响该机床工艺精度此设计满足设计需要。
3 结论
根据大型复杂构件焊接及其加工技术要求,设计开发了一款适合大型复杂构件焊接的数控焊接机床,在对机床进行总体设计的基础上,应用CREO 软件机床进行了三维实体模型的建立、装配、运动仿真并应用ABAQUS 有限元软件对所设计的机床进行静力分析与模态分析的基础上,对机床结构进行了优化设计,为一种适应大型复杂构件焊接数控机床的成功开发提供技术支持。在此基础开发的样机,达到了预期目标。
[1]刘展. ABAQUS6.6 基础教程与实例详解[M]. 北京:中国水利水电出版社,2008.
[2]宁新华. 精密蜗轮蜗杆消隙装置[P].械工业出版社,中国:CN197l094,2007,5.
[3]吴宗泽. 机械设计师手册[M]. 北京:机械工业出版社,2009.
[4]张惠敏. 五轴联动数控机床的设计[J]. 机床与液压,2010,38(8).
[5]杜玉湘,陆启建,刘明灯. 五轴联动数控机床的结构和应用[J]. 机械制造与自动化,2008,37(3):14-16.
[6]王世军,黄玉美. 机床整机特性的有限元分析方法[J].机床与液压,2005(3):20-22.
[7]王学林,徐岷,胡于进. 机床模态特性的有限元分析[J].机床与液压,2005(2):48-49.
[8]吴良宝,张年松,张立. CK1440 型数控车床床身动态特性分析[J]. 机械制造与研究,2011(6):18-19.
[9]朱灯林,肖胜,等. 弧焊机器人焊枪姿态的自动规划[J].上海交通大学学报,2004(9):1472-1475.
[10]Ra Jeev S.Vibration analysis of machine structure[C].Internation Conferenee on RecentAdvanced Structure Dynamics. Southampton,July,2003.
[11]Woodward,Neil. Multi Process Orbital Welding-by Computer[J]. Welding and Metal Fabrication. 1996,64:18-19.
猜你喜欢
振动与冲击(2022年21期)2022-11-21
现代农机(2022年3期)2022-07-11
化工机械(2022年1期)2022-03-21
金属加工(冷加工)(2022年2期)2022-02-24
重庆理工大学学报(自然科学)(2020年12期)2021-01-21
组合机床与自动化加工技术(2019年11期)2019-11-27
制造技术与机床(2019年7期)2019-07-22
时代汽车(2019年22期)2019-02-05
智能制造(2017年4期)2017-07-24
组合机床与自动化加工技术(2017年5期)2017-05-25