继电器机械结构模型的建立和仿真分析
2014-03-26 02:47高晓琳
黑龙江工业学院学报(综合版) 2014年3期
高晓琳,卢 婧
(黑龙江工业学院,黑龙江 鸡西 158100)
随着电力电子技术和计算机技术的不断发展,系统的多功能化、大型化及复杂化要求组成系统的元件的可靠性越来越高。卫星用电磁继电器作为国防武器装备系统和宇航系统中的主要电子元器件之一,其可靠性将直接影响整个国防武器装备系统和宇航系统的可靠性,而且卫星用继电器不同于其它类型的继电器,由于这种继电器的工作条件比较恶劣,需要在惰性气氛环境下工作,在这种条件下,没有任何润滑剂,而且需要工作20年之久,所以这种继电器的可靠性尤其显得更加重要,所以研究卫星用继电器的可靠性及可靠性设计方法,对保证整个系统的可靠性及质量具有重要的理论意义和实用价值。
对于继电器模型的结构设计涉及到很多问题,首先就要涉及到电学问题,考虑到课题需要研究摩擦磨损问题,对原来的继电器模型进行了简化处理,只考虑机械结构方面的问题,对其进行建模。建模方式有很多种,对于简单的结构可以直接在ADAMS中建模,而对于复杂结构就要依靠其他三维软件来建立模型,例如可以选用Pro_e、UG、SolidWorks、Catia等等,[1]我选用SolidWorks作为建模工具,然后生成指定文件导入到ADAMS中进行仿真分析。
一 建立继电器机械结构模型
继电器由衔铁、顶支架、底支架、触头、动簧片、动断静簧片、动合静簧片等组成,在建立模型过程中,对模型作了简化,省略了线圈、磁铁等部件。
二 仿真分析
形成模型后,生成Parasolid格式,保存在ADAMS的工作目录下,然后导入到ADAMS中,同时ADAMS得出转动惯量和质量,并定义各部件的材料属性,对各个结构进行约束.在这里对结构进行了简化,在旋转构件上加驱动力来模拟电磁铁产生的吸附力,驱动力(其中d代表角度,time代表时间),设置仿真时间为0.003s,步长为0.000025s,并定义摩擦副之间的摩擦系数,当部件没有进行过处理时,对于两种材料(铜与玻璃)的摩擦系数为0.53,以此为基础进行仿真。[2]
对于继电器模型的簧片而言,当触头接触到簧片时就会发生弯曲才能与动合静簧片接触,与动断静簧片分开,起到通断电路的作用,但是如果在仿真中直接进行仿真,那么簧片就是刚性体,不会发生变形,那么即使步长足够小也会发生错误或者出现触头穿透簧片的现象,也就是说当触头与簧片接触时簧片不会像实际情况那样发生变形。
因此,为了使仿真符合实际情况就要把刚性体转化为柔性体,即把不可以变形的部件转化为可以变形的部件。对于刚性体转化为柔性体有很多方法,本文采用几何外形法生成柔性体。[3]
(1)计算动簧片的mnf文件;
(2)加入ADAMS/AutoFlex模块;
(3)增加约束,稳固柔性体;
(4)用产成的柔性体替换原有的动簧片刚性体,并去掉原来的刚性体;
(5)创建两个哑物体,并把柔性体与哑物体固定。
(6)定义哑物体与触头的接触;
(7)设置仿真时间为0.015s仿真步长为0.000025s,仿真结果.在仿真中,没有出现穿透现象,当时间足够小时,改变驱动力的频率,可以发现当动合(断)动簧片与静簧片接触时产生回弹跳动,哈尔滨工业大学有相关的分析,所以符合情况。[4]
三 分析仿真曲线
1.仿真速度曲线和加速度曲线。

图1 触头速度曲线

图2 动断静簧片速度曲线图

图4 触头加速度曲线

图5 动簧片速度曲线图
从上面这些速度和加速度仿真曲线中我们可以看出来,在仿真过程中各个构件的速度与加速度都在变化,应用机械系统运动学和动力学理论可以求出构建在各个状态的速度与加速度。
2.触头、动断静簧片、动簧片与动合静簧片接触力仿真分析。[5]
因为在特殊环境下,对于此次研究的继电器模型,一些关键零部件会产生磨损,影响继电器的工作,所以要分析继电器簧片的受力情况如图6所示。

图6 动簧片与动合静簧片接触力图
从图3中看出,在0.015s时间段内产生了两次撞击,并且每次都有回跳现象,并存在X与Y方向的力,在0.008s时力的大小分别为6N和9.6N,而从图3-11(c)中可以看出,也存在于Z方向分力,因此可以推断出当动合静簧片与动簧片接触时动簧片发生了侧倾,造成接触时产生Z方向的分力.
同样动簧片与动断静簧片接触时也会产生弹跳,但是由于开始动簧片就是与动断静簧片接触并存在接触力,其值为2.5N,所以当动簧片返回来时会与动断静簧片发生碰撞,但是却不会产生X和Y方向的作用力,只有在Z方向存在85N的作用力,结果如图7所示。

图7 动断静簧片动簧片与动簧片接触力图
对于动簧片与触头的接触作用力如图8所示。

图8 动簧片与触头接触力图
由图8也可以看出来,动触头与动簧片之间的距离随时间的变化情况,随着时间的推移,当触头接触动簧片后分开时,距离与时间的函数会产生一次回跳,也就是上面所说的动簧片的弹跳。

图9 动触头与动簧片之间的距离随时间的变化情况
另外,当触头与动簧片接触时会产生相对滑动,因而就会产生滑动摩擦力,从图8也可以看出来,在X和Y方向没有产生摩擦力矩,在Z方向却产生了很大的力矩,在0.004s时接触,发生摩擦,在0.0045s时产生回弹,由于摩擦力的存在,而且对于高频运动的继电器来说,即使摩擦力很小,经过长时间的积累,在接触表面也会产生很大的磨损现象,而接触力不可能减小,所以只能减小摩擦副之间的摩擦系数,关于如何减小摩擦系数的问题,然后会把减小摩擦系数后的结构进行二次仿真,验证是否产生良好效果。
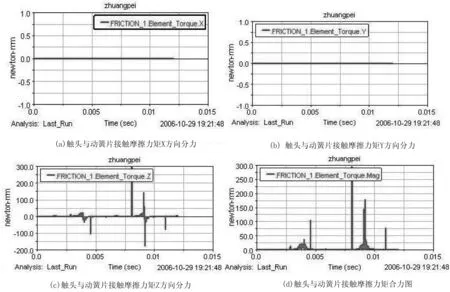
图10 触头与动簧片接触摩擦力矩图
3.驱动副仿真分析。
对于整个继电器而言,由于在电磁力的不断吸合作用下,驱动副也是个摩擦磨损比较严重的地方,经过仿真,在未涂层前得到仿真曲线如图11所示。

图11 驱动副力矩曲线图
从图7可以看出,不管是X方向还是Y或者Z方向,都产生了很大的反作用力矩,X方向力矩为112N.mm, 而产生力矩的根本原因就是当触头与簧片接触时会产生反作用力,同时存在很大的摩擦,而且在驱动副这里,当磁铁吸合释放衔铁时也存在摩擦力 ,同样由于继电器的高频运动,在摩擦副之间发生冷焊现象,使继电器失去作用。
四 结论
本文对动力学仿真及仿真软件ADAMS进行了详细的阐述,并通过仿真得到了继电器机械系统各摩擦副之间的运动状态,从这些曲线中可以看出减小运动副之间的作用力。
[1]吴义彬.继电器用户实用手册[K].北京:国防工业出版社,1992:42~45.
[2]胡昌寿.航天可靠性设计手册[K].北京:机械工业出版社,1999:146~65.
[3]谢国强,刘茂恺,等.航天继电器设计规范[S].桂林航天电器公司企业标准,2000:104~106.
[4]李景森.航天继电器抗振设计概述[J].航天继电器,1998(2):73~77.
[5][苏]B.3.罗依金.小型密封电磁继电器[M].王蓉芳,译.北京:人民邮电出版,1979:81~94.
猜你喜欢
机械设计与制造工程(2022年4期)2022-05-17
中外公路(2022年1期)2022-05-14
中学生数理化·八年级物理人教版(2020年3期)2020-10-29
汽车电器(2020年4期)2020-04-23
铁道通信信号(2020年8期)2020-02-06
铁道通信信号(2019年11期)2019-05-21
金属加工(冷加工)(2018年10期)2018-10-26
学苑创造·C版(2015年11期)2016-01-13
中国铁道科学(2015年5期)2015-06-21
重庆理工大学学报(自然科学)(2014年10期)2014-09-18