
旋转控制固定鸭舵的导航初始化与控制算法研究
2014-08-11 11:29张衍儒肖练刚张继生
航天控制 2014年6期
张衍儒 肖练刚 张继生 田 丰 陈 昌
北京航天自动控制研究所,北京 100854
旋转控制固定鸭舵的导航初始化与控制算法研究
张衍儒 肖练刚 张继生 田 丰 陈 昌
北京航天自动控制研究所,北京 100854

针对制导迫击炮弹的固定翼鸭舵导航初始化,设计了基于GPS信息的衰减记忆法扩展卡尔曼滤波算法,用于实时求解固定翼鸭舵的气动力合成矢量,然后结合固定翼鸭舵的气动数学模型,设计了固定翼鸭舵的导航初始化算法。并在直流电子负载系统的基础上设计了鸭舵的旋转控制算法,通过仿真试验验证了依靠GPS提供的位置速度信息和鸭舵滚转角速度信息可以快速实现固定翼鸭舵的导航初始化,为旋转控制固定翼鸭舵的工程应用,提供了理论参考。
旋转控制固定翼鸭舵;导航初始化;直流电子负载系统;控制算法
迫击炮弹发射和飞行时,由于受到出膛跳角和随机风影响,不能精确命中目标,如果能采用智能化改造方式,改造现役的迫击炮弹为精确制导迫击炮弹,能以较少的经费投入就显著提高迫击炮的火力打击能力。旋转控制固定翼鸭舵以现役迫击炮弹的弹体为主体,实现迫击炮弹的智能化改造。
旋转控制制导迫击炮弹由3部分构成[1]:1)改装的斜切尾翼,用于迫击炮弹发射后为弹体提供绕弹体纵轴正向旋转的诱导滚转力矩;2)标准迫击炮弹弹体,此部分未进行技术改造,可以应用现役存储的大量常规迫击炮弹弹体;3)迫击炮弹头部制导模块,依靠GPS提供的位置速度信息和鸭舵滚转角速度信息,利用导航卫星的信息通过旋转控制固定翼鸭舵实现迫击炮弹的制导控制。

图1 旋转控制制导迫击炮弹结构示意图
迫击炮弹头部制导模块[2]包含旋转控制固定翼鸭舵、永磁发电机、可变负载系统、GPS模块和控制处理器等模块。头部制导模块采用旋转控制固定翼鸭舵进行弹体姿态控制,旋转控制固定翼鸭舵由4片固定舵角的舵片组成,其中1对旋转鸭式舵的偏转方向是相反的,在弹体飞行时会产生1个绕弹体纵轴反向的气动滚转力矩;另1对控制舵片,偏转方向相同,弹体飞行时会产生气动力用于弹体姿态控制。
图2 旋转控制固定翼鸭舵结构示意图
鸭式舵和它们下面的圆台形外壳,是可以旋转的,而且外壳内有一圈永磁体,相当于永磁发电机的转子,里面套着的是“引信套”。引信套的后部是标准螺纹,能和普通引信一样,旋接到弹体顶端,因此在迫击炮弹发射后,这个引信套将跟着弹体一起绕弹体纵轴正向方向旋转。标准螺纹的前面,有一圈转子线圈,控制器等模块被固定在转子线圈的内部,可以把转子线圈看做永磁发电机的定子。迫击炮弹飞行时,转子的鸭式舵部件在差动式偏斜舵片的作用下,通过轴承会绕弹体纵轴反向旋转,而定子的引信套会随弹体绕弹体纵轴正向旋转,其中斜切尾翼提供了绕弹体纵轴正向旋转时需要的滚转诱导力矩。由于转子与定子做反向运动,永磁发电机会产生电压与电流。通过可变负载系统调节永磁发电机的电枢电流,当电枢电流降低时,电磁转矩相应降低,由于气动滚转力距影响,旋转控制固定翼鸭舵会绕弹体纵轴反向增速;反之,当增大电枢电流时,旋转控制固定翼鸭舵的转速会降低。通过实时并连续调整电枢电流,就能控制固定翼鸭舵的转速,使其旋转到需要的角度,此过程叫做“消旋”。消旋完成后,可以利用另一对同向舵片改变弹体的攻角,从而实现旋转控制制导迫击炮弹的制导控制。
文中探索并研究了适用于旋转控制固定舵的导航初始化与控制算法。设计了基于GPS位置信息的衰减记忆法扩展卡尔曼滤波算法,用于实时求解固定翼鸭舵的气动力合成矢量信息。利用求解的气动力合成矢量和固定翼鸭舵的气动数学模型,设计了固定翼鸭舵的初始化算法。采用直流电子负载系统作为迫击炮弹头部制导模块的可变负载系统,并设计相应的初始化控制算法用于旋转控制固定翼鸭舵的初始化控制。
1 固定翼鸭舵气动力合成矢量求取算法
文中在导航坐标系中研究炮弹运动的受控情况,导航系的原点在发射点,OX轴指向飞行方向,OY轴垂直向上,OZ轴与前二轴构成坐标系,根据弹道方程,得出[3]:
(1)
式中,V,θ,ψV分别为导航坐标系下弹药质心速度、弹道倾角和弹道偏航角;x,y,z为导航系下质心位置坐标;g为重力加速度、T为采样时间;nx,ny,nz为弹道坐标系下炮弹弹体过载;ui为零均值高斯白噪声。
运用参数辨识的衰减记忆法扩展卡尔曼滤波,得到如下滤波方程:
1) 取状态变量
X(k)=
[V(k)θ(k)ψV(k)x(k)y(k)z(k)]
(2)
2) 观测方程为:
Z(k)=H(k)*X(k)+N(k)
(3)

(4)
3) 确定滤波初值X(0/0),P(0/0):
P(0/0)=var(X(0/0))
(5)
4) 状态预测:

(6)

(7)

(8)
5)预测方差:
P(k/k-1)=Φ(k,k-1)·[P(k-1/k-1)·s]*
ΦT(k,k-1)+Q(k-1)
(9)
式中,s为衰减因子,且s>1。
由于s>1,增大了P(k/k-1),相应增大了K(k),这意味着采用衰减记忆法滤波算法,对新量测值的利用权重比用基本卡尔曼滤波方程时大。
6)滤波增益:
K(k)=P(k/k-1)·HT(k)*
[H(k)·P(k/k-1)·HT(k)+R(k)]-1
(10)
7)状态滤波:

(11)
8)滤波误差:
P(k/k)=[I-K(k)·H(k)]·P(k/k-1)
(12)
9)气动力分量求取:
(13)
固定翼鸭舵的气动力合成矢量可以近似为mg·ny(k)与mg·nz(k)的合成矢量。
2 固定翼鸭舵的导航初始化算法
导航初始化时,弹体的攻角与侧滑角近似为0,旋转控制固定翼鸭舵[4]在弹体横轴方向的气动力矢量Fc,可近似为:
(14)
δz为固定翼鸭舵的同向偏转舵角。
固定翼鸭舵的气动力合成矢量Fc可以近似为:
(15)
由式(15)和(16)可近似得到:
(16)
当固定翼鸭舵旋转过0°或±180°时,实时估计的滚转角位移φN存在明显正负变化的现象,设估算角位移正负变化时刻为导航初始化结束时刻。
3 可变负载设计和初始化控制算法
1)可变负载设计
采用直流电子负载[5]系统作为旋转控制固定翼鸭舵的可变负载系统,直流电子负载简易电路图如图3所示。

图3 直流电子负载简易电路图
图3中,运放 OP27通过控制MOS管漏极的导通量,即可获得稳定的控制电流。其稳定值由运放OP27的正端电压值与采样电阻R1阻值之比决定。当有OP27正端电压值信号到来时,如果采样电阻R1上的电压小于正端电压值,即OP27的反相输入端电压小于同相输入端的电压,则OP27的输出加大,使得MOS管加大导通,从而为采样电阻补流。若采样电阻上的电压大于恒流信号,即OP27的同向输入端电压小于反向输入端电压,则OP27减小输出,也就降低了采样电阻上的电流。
2)初始化控制算法
旋转控制固定翼鸭舵初始化时,需满足2个条件:1)满足α与βM近似为0的假设条件;2)通过GPS求取的固定翼鸭舵气动力合成矢量Fc方向准确。
为了满足第1个限制条件,需要鸭舵以额定转速运动,从而实现旋转控制制导迫击炮弹的双圆运动[6]。为了满足第2限制条件,需要鸭舵的滚转角位移在旋转过0°或±180°时进行导航初始化赋值过程。


(17)

由式(18)可得直流电子负载的正端命令电压值UCMD_DA为:
(18)
4 仿真试验与数据分析
导航初始化时攻角α与侧滑角β变化如图4所示。
图4 导航初始化时双圆变化曲线
由图4可知攻角α与侧滑角β模值逐渐缩小,最终收敛到±2°以内,满足旋转控制制导迫击炮弹作双圆运动的假设条件。
导航初始化时直流电子负载输出命令电压值UCMD_DA、固定翼鸭舵受到的力矩与角速度变化曲线如图5所示。
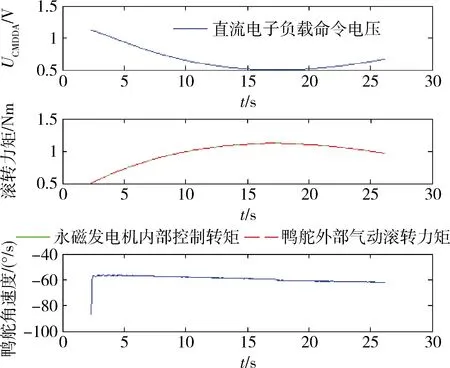
图5 导航初始化时控制参数变化曲线
由图5可知直流电子负载可以作为迫击炮弹头部制导模块的可变负载系统使用,文中设计的初始化控制算法能实现旋转控制制导迫击炮弹的初始化控制。
导航初始化过程中,气动力分量(nx,ny,nz)原始数据和卡尔曼滤波(EKF)后数据对比图如图6所示。

图6 求取固定翼鸭舵气动力合成矢量对比图
由图6可看出,采用基于GPS位置信息的衰减记忆法扩展卡尔曼滤波算法,可以降低弹道扰动对固定翼鸭舵气动力合成矢量求取过程的影响,提高固定翼鸭舵气动力合成矢量的求取精度。
采用滚转角位移估算算法求取的估算位移与真实角位移的对比图如图7所示。

图7 固定翼鸭舵角位移估计值与真实值对比图
由图7可知,鸭舵的滚转角位移在旋转过0°或±180°时,采用估算算法求取的固定翼鸭舵角位移会产生正负上的跳变,通过此种现象即可实现固定翼鸭舵的角位移初始化。当位移估计值从正跳到负时,初始化角位移为0°;当角位移估计值从负跳到正时,初始化角位移为±180°,因此设定估算角位移正负变化时刻为导航初始化结束时刻。
图8为采用导航初始化后鸭舵角位移的变化与真实鸭舵角位移变化的对比图,图中滚转角位移存在5.52°的误差,导航初始化结束时间为5.1s,满足控制指标的实际要求。
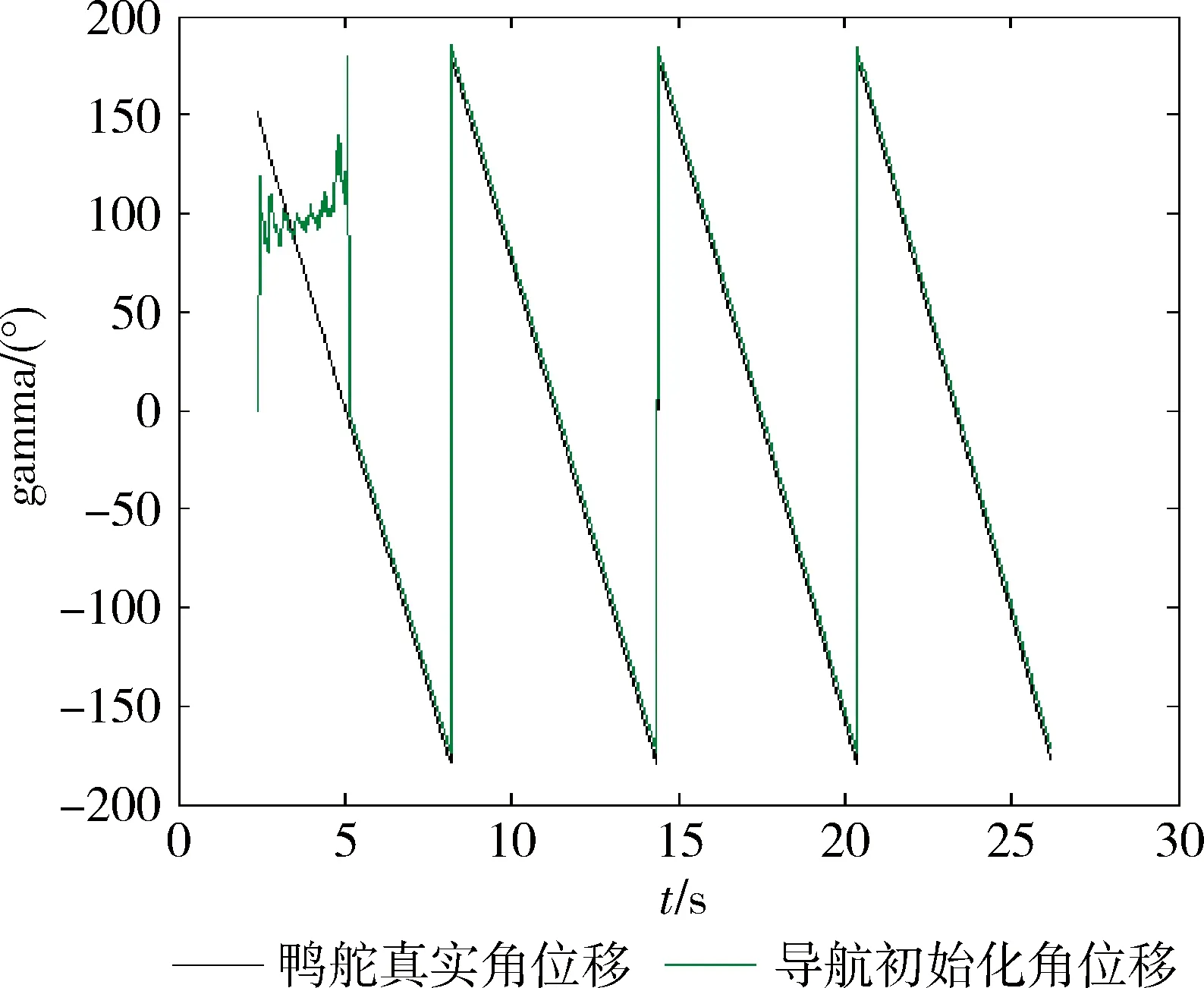
图8 固定翼鸭舵角位移导航初始化过程
5 结论
通过直流电子负载系统实现旋转控制固定翼鸭舵的旋转控制,利用固定翼鸭舵气动力合成矢量的变化规律,通过GPS信息完成固定翼鸭舵的导航初始化。导航初始化过程中仅仅采用GPS信息和鸭舵滚转角速度信息,消除了对其它传感器数据的依赖性,降低了制导模块的制造成本,为旋转控制固定翼鸭舵的工程应用,提供了理论参考。
[1] Kelly Hanink. Mortar Guidance Kit (MGK)[R]. America: 2010 Joint Armaments Conference, 2010.
[2] John A.Clancy. Fixed canard 2-D Guidance of Artillery Projectiles, US6981672B2[P]. 2006- 1- 3.
[3] 石章松,刘忠等.目标跟踪与数据融合理论及方法[M].长沙:国防工业出版社,2010:138- 140.(Shi ZhangShong, Liu Zhong. Method and Theory of Target Tracking and Data Fusion[M]. Beijing: National Defence Industry Press, 2010: 138- 140.)
[4] Philippe Wernert. Stability Analysis for Canard Guided Dual- spin Stabilized Projectiles[C].AIAA. Proceedings of AIAA Atmospheric Flight Mechanics Conference. Chicago: AIAA, 2009. 1- 24.
[5] 陈喻,等.简易直流电子负载设计及测试[J].电脑知识与技术,2012,8(34): 8293- 8297.(Chen Yu. A Simple DC Electronic Load[J].Computer Knowledge and Technology, 2012,8(34): 8293- 8297.)
[6] 韩子鹏,等.弹箭外弹道学[M].北京: 北京理工大学出版社,2008:194- 196.(Han Zipeng. Exterior Ballistics of Rockets and Missile [M]. Beijing: Beijing Institute of Technology Press, 2008: 194- 196.)
TheNavigaionInitializationandControlAlgorithmofRollControlFixedCanards
ZHANG Yanru XIAO Liangang ZHANG Jisheng TIAN Feng CHEN Chang
Beijing Aerospace Automatic Control Institute, Beijing 100854,China
Whenrollcontrolguidedmunitionsarelaunched,therollangleofcanardsmaynotbeinitializedunderhighimpact.Thereforethenavigationinitializationofrollcontrolfixedcanardsmustbefinishedwhenthemunitionsarestableinflight.Theattenuationmemory-extendedKalmanfilteralgorithmbasedonGPSinformationisdesignedtosolvethereal-timeaerodynamicvectoroffixedcanards,andthentheaerodynamicmathematicalmodeloffixedcanardsiscombinedtodesignreal-timeestimationalgorithmforcanardsrollangular.Inthesimulationexperiment,theDCelectronicloadsystemisusedtocontrolcanardsrotation.TheexperimentalresultsshowthatthenavigationinitializationoffixedcanardscanbefinishedonlybyGPSinformationandcanardrollrate,andtheinitializationalgorithmissuitableforengineeringapplication.
Rollcontrolfixedcanards;Navigationinitialization; DCelectronicloadsystem;Controlalgorithm
2014- 05- 07
张衍儒(1985-),男,哈尔滨人,博士研究生,主要研究方向为制导弹药控制系统综合;肖练刚(1973-),男, 四川资中人,博士,研究员,主要研究方向为导航、制导与控制;张继生(1980-),男,河北人,工程师,主要研究方向为控制系统综合;田丰(1985-),男,江苏人,工程师,主要研究方向为控制系统综合;陈昌(1983-),男,河北人,工程师,主要研究方向为控制系统综合。
TJ412.+1
: A
1006- 3242(2014)06- 0034- 06
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24
机电信息(2021年17期)2021-07-01
电子制作(2019年7期)2019-04-25
电子测试(2018年18期)2018-11-14
课程教育研究·学法教法研究(2018年14期)2018-08-11
电子测试(2017年11期)2017-12-15
航空模型(2016年10期)2017-05-09
光学仪器(2016年5期)2017-01-12
通信电源技术(2016年1期)2016-04-16
舰船科学技术(2016年1期)2016-02-27
