北斗系统在远洋及南极地区的定位性能分析
2015-01-29 06:01杜玉军王泽民安家春谢苏锐
极地研究 2015年1期
杜玉军 王泽民 安家春 谢苏锐
(1武汉大学测绘学院,湖北武汉430079;2武汉大学中国南极测绘研究中心,湖北武汉430079)
0 引言
卫星导航系统作为重要的空间信息基础设施受到世界各国的重视。中国于2000年初步建成了北斗卫星导航试验系统,成为继美国、俄罗斯之后世界上第三个独立拥有卫星导航系统的国家[1]。正在建设的北斗卫星导航系统(Beidou Navigation Satellite System,下称北斗或BDS)发展迅速,尤其近两年随着北斗卫星的高密度发射,北斗卫星导航系统已初步具备了区域定位、导航和授时(PNT,Positioning,Navigation and Timing)的服务能力,并将成为全球导航卫星系统GNSS(Global Navigation Satellite System)的重要组成部分,为全球PNT用户做出显著贡献[2-3]。
定位效果分析是导航系统性能评估的重要内容。在北斗卫星导航系统建设过程中,国内外学者通过仿真和实测,对其信号、可用性、定位精度等各方面的性能开展了分析和评估。欧阳晓凤等人的实验结果表明,目前北斗系统信号质量与GPS处在同一水平[4];翟桅等[5]和杨元喜等[6]分别用仿真星座和实际星历分析了北斗的全球可用性,表明北斗在亚太地区可满足定位需求;Chen等[7]通过仿真说明北斗系统在截止高度角为10°时可以满足导航精度要求;杨元喜等[6]则对服务区域内伪距单点定位、伪距差分定位和载波相位差分定位等多种定位模式的精度进行了实测评估,结果表明北斗单点定位精度已满足设计要求,载波相位差分定位精度也与GPS处于同一水平,伪距差分定位精度还有待提高。Odolinski等[8]和 Montenbruck等[9]还对北斗/GPS组合定位、北斗卫星钟差及三频观测值的性能等方面进行了分析。然而目前相关研究主要集中于国内区域,对于全球大范围的分析只能通过仿真的手段。本文利用第28次中国南极科学考察(2011年11月3日至2012年4月8日)的机会采集了大范围的连续实测数据,进行单频伪距单点定位,并对现阶段的北斗系统在考察沿线,尤其在远洋及南极地区不同运动状态下的信号质量和定位效果与GPS进行了对比分析。
1 北斗卫星系统概况
北斗卫星导航系统由空间段、地面段和用户段三部分组成。空间段为5颗地球静止轨道卫星(GEO)、3颗倾斜地球同步轨道卫星(IGSO,实际发射5颗)和27颗中圆地球轨道卫星MEO组成的混合星座。GEO和IGSO卫星均分布在58°E—160°E经度范围内,这对中国以至亚太地区有提高覆盖能力的作用,与GPS有重要的区别。
截至2012年4月8日,即本文数据采集结束时,北斗系统在轨卫星数已达11颗,除1颗测试卫星和1颗失效卫星外,其余9颗均正常工作,且为高轨卫星,其中第10、11颗卫星在数据采集期间发射,如表1所示。
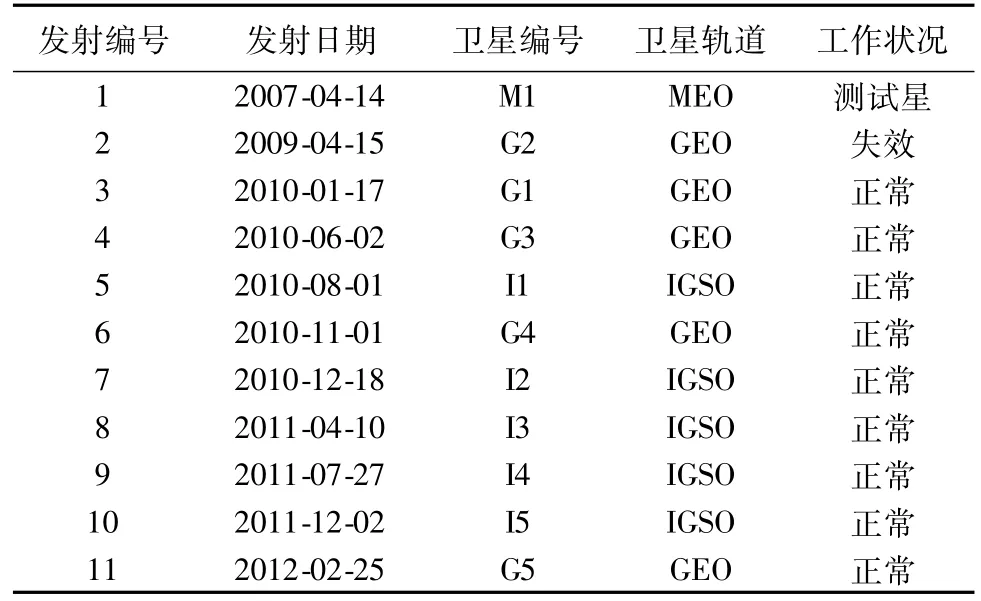
表1 采集数据时的北斗卫星发射情况Table 1.The launched BDS satellites before data collection
北斗卫星导航系统采用2000中国大地坐标系(CGCS2000),根据其定义与实现,CGCS2000与ITRF一致性为3 cm;CGCS2000与 WGS84(G1150)相容至cm级水平,在坐标系的实现精度范围内,两者坐标是一致的[10-11]。本文北斗和GPS的定位解算分别在CGCS2000和WGS84下进行,但坐标系统的差异相对于伪距单点定位的精度可以忽略。北斗的时间系统为北斗时(BDT),起始历元为2006年1月1日0时0分0秒(UTC)。BDT与UTC的偏差保持在 100 ns以内[12]。
2 数据说明
2.1 数据采集
本文实验采用了和芯星通UR240-CORS型北斗/GPS双系统四频率接收机,能够同时采集北斗B1/B2和 GPS L1/L2的观测数据[6,13-14]。北斗和GPS的采样率均为30 s,截止高度角为10°。所采集的数据包括第28次中国南极科学考察期间,雪龙号极地考察船航线和内陆车队路线上的动态数据以及在中国南极中山站观测的静态数据;另外,为了对比分析不同区域静态定位效果,在中国武汉也进行了静态观测。数据采集的经纬度范围及观测时段如表2所示,路线图如图1所示。
2.2 数据处理
卫星导航系统的定位效果从信噪比、多路径、可见卫星数、精度因子、定位精度等方面进行分析。其中精度因子(DOP,Dilution of Precision)包括几何、位置、平面、高程、时间精度因子(GDOP、PDOP、HDOP、VDOP、TDOP),其中 PDOP直接反应了卫星空间分布的情况,其值越小,卫星分布的图形强度越高,定位精度也越高[15]。
北斗和GPS的标准定位数据处理均采用广播星历和C/A码单频伪距观测值,分别进行逐历元单点定位解算。单频伪距观测值进行了如下改正:卫星钟差采用广播星历中的二项式模型,电离层延迟使用GPS广播星历中的Klobuchar模型改正,对流层延迟采用标准模型进行改正。此外,剔除了单点定位中由于解算失败得到的异常结果。

表2 数据采集的经纬度范围及观测时段Table 2.Latitude,longitude,and time range of each data set

图1 数据采集路线图,其中黑色和红色分别为雪龙船往、返航线,绿色为内陆队往返路线Fig.1.Routemap of data collection.The black line and the red line show the route of R/V Xuelong’s round-trip.The green line shows the route of the inland expedition
为评定北斗和GPS伪距单点定位的精度,本文采用GPS精密单点定位(PPP,Precise Point Positioning)的结果作为真值,求取北斗和GPS伪距单点定位的误差。PPP解算使用武汉大学高精度GPS精密单点定位软件TriP,该软件精密单点定位精度在动态情况下为cm-dm级,在静态情况下为mm-cm级[16],相对于伪距单点定位十几米以上的定位精度,完全可以作为真值使用。另外,对PPP解算结果进行了质量控制和精度检验,保证其作为精度评估基准的可靠性。
3 信号质量分析
卫星信号质量的好坏直接影响着观测值的数据质量,进而影响定位的精度。信噪比(S/N0)是直接衡量信号强度的指标,其值越大,信号抗干扰能力越强,信号质量也就越好;电离层延迟、接收机噪声、多路径效应也是影响数据质量的主要因素[17],其中接收机噪声和多路径效应可以反应信号质量的好坏。本文分别选择了武汉、中山站、雪龙航线上赤道附近各一天的观测数据按不同高度角范围分别统计了GPS、北斗卫星C/A码的平均信噪比和平均多路径误差(RMS),结果如表3所示。其中多路径误差采用式(1)计算,对于某一颗卫星i频段的伪距观测值Pi,多路径误差Mi为:

式中,Φi、Φj为波长分别为 λi和 λj的载波相位观测值,j为不同于i的任一频段。该式计算的结果实际上包含了信号的测量噪声[18]。
从表3可以看到,在低高度角情况下,北斗卫星的信噪比相对于GPS整体略高,而伪距多路径相对略大;而高度角在30°以上时,北斗卫星的信噪比和多路径与GPS基本在同一水平。这说明北斗的信号质量总体上与GPS相当。
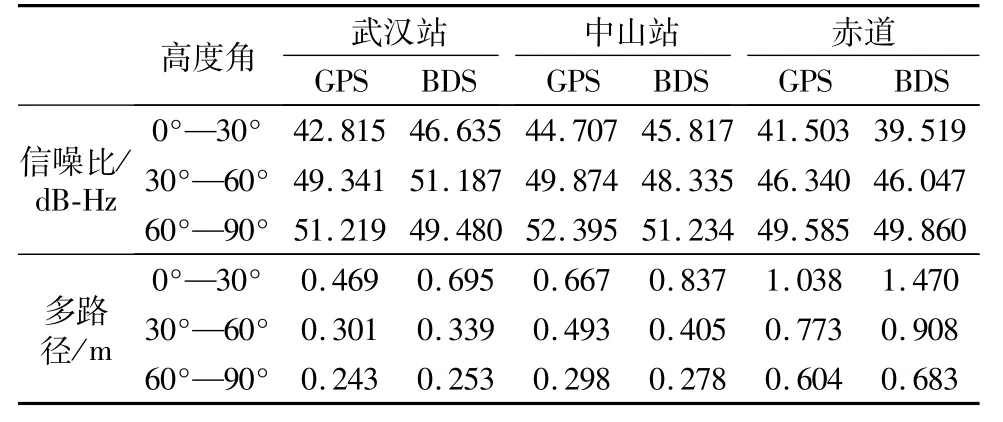
表3 GPS和北斗卫星平均信噪比和多路径(RMS)按高度角统计结果Table 3.Statistics of GPSand BDS’Signal-Noise ratio and the multipath(RMS)by satellites’elevations
4 定位效果分析
4.1 动态定位
4.1.1 卫星数和 PDOP值
图2和图3分别为雪龙船航线和内陆车队路线上GPS和北斗的可见卫星数及PDOP值。可以看到在两条路线上GPS的可见卫星数基本都能保持在6—12颗,PDOP值也几乎都在10以内;北斗只有在中低纬地区其可视卫星才可能达到4—9颗,PDOP在10以下,而在高纬地区可视卫星经常在4颗或以下,难以定位。显然,现阶段北斗卫星几何分布较差。
下面进一步分析可视卫星数随经纬度的变化,按纬度15°间隔、经度30°间隔统计了两条航线上GPS和北斗的平均可见卫星数,如图4所示。可以看到GPS平均可见卫星数随经纬度变化不大,全都在8—10颗;而北斗在南北纬45°和经度90°E—150°E之间平均6—8颗,其他区域则平均只有2颗左右。这也反应了目前以高轨卫星为主的北斗卫星星座还主要集中在亚太地区上方。

图2 雪龙船航线上GPS和北斗的可见卫星数和PDOP值Fig.2.Number of visable satellites and PDOP along the route of R/V Xuelong

图3 南极内陆车队路线上GPS和北斗的可见卫星数和PDOP值Fig.3.Number of visible satellites and PDOP along the route of Antarctic inland expedition
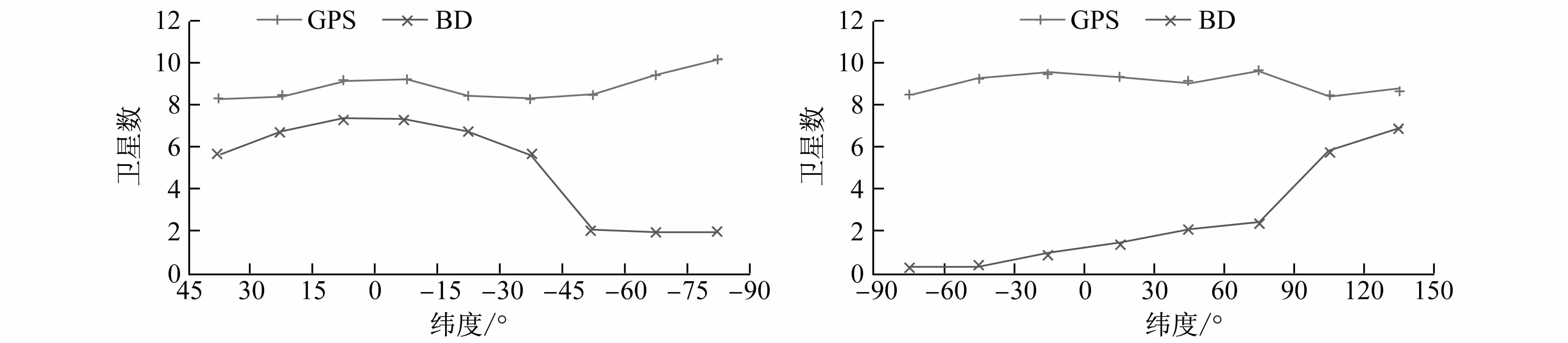
图4 动态定位中GPS和北斗平均可见卫星数随经纬度的统计Fig.4.Number of visable satellites and PDOP of kinematic positioning
4.1.2 定位精度
将伪距单点定位解与GPS精密单点定位解求差,并转换为N、E、U分量,视为定位误差,反应定位的外符合精度。将雪龙船航线上GPS和北斗的定位误差按纬度进行统计,如图5所示。可以看到在动态情况下,GPS定位误差的变化比较稳定,N、E分量在10 m左右,U分量在20 m左右;而北斗在大约45°以内的地区定位精度与GPS相当,在45°以上的中高纬地区定位精度急剧下降,N、E、U误差可达100 m以上,甚至根本无法定位。这是由于可见卫星几何分布随纬度的变化造成的,图2和图4中北斗的可见卫星数和PDOP值在纬度45°左右有明显的变化,可以说明这个问题。内陆车队路线由于北斗可视卫星太少,多数时候无法定位,因而这里不再讨论。
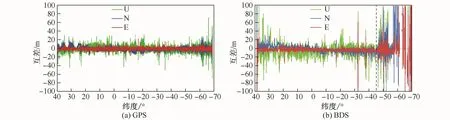
图5 雪龙船航线上GPS和北斗的定位误差(按纬度统计)Fig.5.Positioning error along the route of R/V Xuelong(by latitude)
4.2 静态定位
4.2.1 卫星数和 PDOP值
图6给出了武汉和中山站上GPS和北斗的可见卫星数和PDOP值。从图中可以看出,在中低纬度的武汉,GPS和北斗的可视卫星均在5颗以上,PDOP也都维持在7以下,说明北斗卫星的可视条件和几何强度与GPS相当;在高纬度的南极中山站,GPS的可视卫星稳定在7颗以上,PDOP值也保持在7以下,观测条件与中低纬地区并没有太大差别,北斗则最多可观测到5颗卫星,大部分时间因少于4颗而无法定位,PDOP值也相对较大。另外值得注意的是,由于GPS卫星轨道类型为MEO,而北斗目前均为高轨卫星,GPS卫星相对北斗而言升降更加频繁,使得其PDOP值随时间的变化也较快。
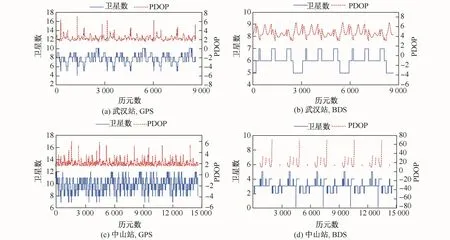
图6 静态定位中GPS和北斗的可见卫星数和PDOP值Fig.6.Number of visable satellites and PDOP of static positioning
4.2.2 定位精度
对武汉站和中山站的GPS静态数据进行PPP解算,得到两个测站的精确坐标,分别作为真值统计两个测站上GPS和北斗单点定位误差的均值、标准差和RMS,结果如表4所示。其中,误差均值可以反应定位中可能存在的系统误差,标准差可以反应误差分布的离散情况,而RMS则反应了定位的统计精度。可以看到在中低纬度的武汉,单独利用北斗定位N、E方向的统计精度分别为6.5 m和2.6 m,达到了与GPS相当的精度;高程方向的精度在10 m左右,比GPS要差,但也已达到设计水平;对于高纬度地区的中山站,北斗水平向和高程向的RMS均在10 m以上,尤其在N方向上达到了17 m,定位精度显著低于GPS。另外,从定位均值可以看到在武汉站北斗和GPS的N方向和高程向均有明显的系统误差,这是由于使用的电离层模型不够完善造成的。

表4 静态定位误差统计结果(单位:m)Table 4.Statistics of static positioning error(m)
从静态定位的结果可以看出,北斗在中山站定位的水平向精度略低于高程方向,这与GPS通常出现的水平向精度显著优于高程精度的现象不符。实际上,从动态定位结果中也可以看到,在45°以上的中高纬地区,北斗单点定位的水平精度明显低于高程精度。这是由于现阶段的北斗卫星全部为高轨卫星,在高纬地区可视卫星的高度角均比较低,测距误差在水平方向的投影更大,以致水平方向的精度较低。
5 结论
本文通过对第28次中国南极考察期间采集的大跨度的GPS/北斗数据进行伪距单点定位解算,对比分析了GPS和北斗在不同区域、不同状态下的定位效果,得出以下结论。
(1)北斗卫星信号质量总体上与GPS相当,两者在定位效果上的差异主要是由卫星数量和分布造成。
(2)对于动态定位,在大约45°以下的中低纬地区,北斗可视卫星可以达到4—9颗,PDOP在10以下,定位精度与GPS在同一量级,水平方向在10 m左右,高程方向在20 m左右;而在45°以上的中高纬度地区,北斗可视卫星较少,几何图形较差,定位精度急剧下降,误差可达100 m以上甚至无法定位。
(3)对于静态定位,在中低纬度的武汉,北斗的可视卫星在5颗以上,PDOP也在7以下,N、E方向精度分别为6.5 m和2.6 m,与GPS相当;高程方向的精度在10 m左右,相对于GPS较差,但已满足设计要求;在高纬度的南极中山站,北斗可视卫星在5颗以下,PDOP值也相对较大,水平和高程的精度均劣于10 m,显著低于GPS,而大部分时间因少于4颗卫星而无法定位。
(4)在45°以上的中高纬度地区,水平方向的定位精度低于高程方向。
以上结果表明,现阶段的北斗卫星导航系统已经能够实现标准定位,但还不具备全球定位能力;同时由于可用卫星总数较少,且全是高轨卫星,北斗系统现阶段卫星分布的几何图形强度远远弱于GPS,因而定位效果与GPS相比还有待提高。只有发射更多的MEO卫星,将现阶段的区域导航系统扩展为全球卫星导航系统,保证在全球范围内都能接收到足够的卫星,才能改善卫星的分布情况,提高定位的精度和可靠性,从而进一步为中国以至世界的人民生活和经济发展做出重要贡献。
致谢感谢中国第28次南极科学考察队对本文数据采集的支持,感谢武汉大学测绘学院博士生李盼、武汉大学卫星导航定位技术研究中心博士生胡志刚和苏醒给予的帮助。
1 中国卫星导航系统管理办公室.北斗卫星导航系统发展报告(2.0版).北京,2012.
2 杨元喜.北斗卫星导航系统的进展、贡献与挑战.测绘学报,2010,39(1):1—6.
3 杨元喜,李金龙,徐君毅,等.中国北斗卫星导航系统对全球PNT用户的贡献.科学通报,2011,56(21):1734—1740.
4 欧阳晓凤,徐成涛,刘文祥,等.北斗卫星导航系统在轨信号监测与数据质量分析.全球定位系统,2013,38(4):32—37.
5 翟桅,张国柱,雍少为.基本星座下北斗卫星导航系统服务性能分析.全球定位系统,2011,36(4):56—60.
6 杨元喜,李金龙,王爱兵,等.北斗区域卫星导航系统基本导航定位性能初步评估.中国科学:地球科学,2014,44(1):72—81.
7 Chen CH,Zhang X L.Simulation analysis of positioning performance of Bei Dou-2 satellite navigation system//2010 2nd International Conference on Advanced Computer Control(ICACC).Shenyang:IEEE,2010,4:148—152.
8 Odolinski R,Teunissen P JG,Odijk D.First combined COMPASS/BeiDou-2 and GPSpositioning results in Australia.Part I:single-receiver and relative code-only positioning.Journal of Spatial Science,2014,59(1):3—24.
9 Montenbruck O,Hauschild A,Steigenberger P,etal.Initial assessmentof the COMPASS/BeiDou-2 regional navigation satellite system.GPSsolutions,2013,17(2):211—222.
10 魏子卿.2000中国大地坐标系及其与WGS84的比较.大地测量与地球动力学,2008,28(5):1—5.
11 魏子卿.2000中国大地坐标系.大地测量与地球动力学,2008,28(6):1—5.
12 中国卫星导航系统管理办公室.北斗卫星导航系统空间信号接口控制文件公开服务信号B1I(1.0版).北京,2012.
13 杜娟,马辉,姚飞娟,等.北斗高精度兼容接收机精度测试与分析.电子测量技术,2013,(5):97—100.
14 周健,毛刚,赵李健,等.BD2/GPS四频高精度接收机在远望号船姿测量中的应用.测绘科学技术学报,2012,29(3):171—174.
15 Langley R B.Dilution of Precision.GPSWorld,1999,10(5):52—59.
16 Zhang X H.Precise point positioning evaluation and airborne Lidar calibration.Technical Report No.4,Danish National Space Center,Copenhagen,2005.
17 范士杰,郭际明,彭秀英.TEQC在GPS数据预处理中的应用与分析.测绘信息与工程,2004,29(2):33—35.
18 Simsky A,Sleewaegen JM,Hollreiser M,et al.Performance Assessmentof Galileo Ranging Signals Transmitted by GSTB-V2 Satellites.ION GPS 2006,FortWorth,Texas,USA,2006.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
中国惯性技术学报(2020年2期)2020-07-24
山东冶金(2019年5期)2019-11-16
中国交通信息化(2019年2期)2019-03-25
测绘科学与工程(2017年3期)2017-08-16
测绘通报(2016年12期)2017-01-06
山东工业技术(2016年15期)2016-12-01
信息记录材料(2016年4期)2016-03-11
中国交通信息化(2015年10期)2015-06-06
导航定位学报(2015年2期)2015-06-05