6R机器人柔体动力学建模及模态分析
2015-03-30 01:46李宇庭彭芳瑜唐小卫陈定方
湖北工业大学学报 2015年4期
李宇庭,李 波,闫 荣,彭芳瑜,唐小卫,陈定方
(1 武汉理工大学智能制造与控制研究所,湖北 武汉 430063;2 华中科技大学机械科学与工程学院,湖北 武汉 430074)
6R机器人柔体动力学建模及模态分析
李宇庭1,李 波1,闫 荣2,彭芳瑜2,唐小卫2,陈定方1
(1 武汉理工大学智能制造与控制研究所,湖北 武汉 430063;2 华中科技大学机械科学与工程学院,湖北 武汉 430074)
根据D-H方法建立6R机器人的连杆坐标系,在此基础上,通过综合考虑机器人关节柔度与臂杆柔度,利用牛顿-欧拉法得到了6R机器人的柔体动力学方程;同时,根据模态理论计算了柔性机器人固有频率,并通过建立刚柔耦合模型进行仿真分析,验证了理论模型的正确性。
关节柔度; 臂杆柔度; 柔体动力学; 模态理论; 刚柔耦合
由于机器人刚性较差,在机加工过程中更容易发生振动及切削不稳定现象,有必要对6R机器人进行柔体动力学建模,并进行相应的模态分析。
在机器人铣削方面,张永贵等人对加工机器人的关节柔度与结构柔度进行综合分析,并推导出二者与机器人末端柔度的具体关系[1],但未考虑机器人动态刚度;C. Reinl等人通过对带有柔性关节的多刚体系统进行动力学建模,并利用相应算法对加工路径进行离线补偿以提高加工质量[2],但其动力学方程未涉及结构柔度。在柔性关节动力学方面,潘博等人采用拉格朗日方法对空间柔性机械臂的动力学进行了建模[3],但未分析其模态特性。本文在已有分析基础上,建立了包含关节柔度与结构柔度的机器人动力学方程,同时对其模态特性进行了分析。
1 6R机器人模型及坐标系
利用CAD/CAM软件对6R加工机器人进行三维建模。由于本文研究重点在于动力学建模,为简化模型,去掉驱动电机及内部传动部件后其虚拟样机见图1。从图中可以看出,机器人结构主要由底座、大臂、小臂及手腕组成,有6个可以独立活动的关节,分别为腰部、肩部、肘部与腕部关节。加工用电主轴在两片半圆形装置的夹持下安装在末端执行器上,由各关节带动电主轴相对工件运动,以此对工件进行铣削加工。

图 1 6R机器人虚拟样机
根据D-H法[4]对该机器人依次建立连杆坐标系{1}~{6}(图2),图中只标出了各坐标系的x与z轴,y轴可由右手定则确定,其中坐标系{0}是机器人基座标系,坐标系方向与{1}的初始位置即θ1=0°时的方向完全重合。从图中可以看出,该机器人共有6个连杆坐标系(不包括基座标系),且其腕部三坐标系即{4}、{5}、{6}的原点重合。
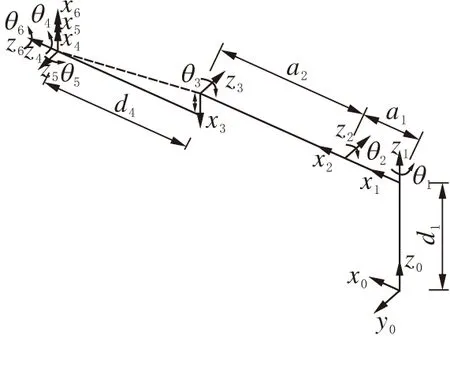
图 2 6R机器人连杆坐标系
根据该机器人的实际技术参数,得到各连杆的4个参数及关节运动范围(表1)。

表1 6R机器人连杆参数
2 机器人柔度模型
2.1 机器人关节柔度
为了对末端执行器进行精确控制,串联工业机器人转动关节需要用大刚度、高传动精度的减速器(一般采用谐波减速器或RV减速器)来连接伺服电机与关节的运动。尽管其刚度很大,但在末端外力作用下,会导致实际输出关节变量与规划关节变量之间产生微小误差,从而使末端执行器的位姿发生变化。
机器人柔性关节传动的物理模型见图3a,中间的机构简图表示传动用RV减速器,将中间的减速器简化为扭簧后的模型如图3b所示,当给定伺服电机的规划角位移q后,由于受到关节扭矩τ,连杆实际角位移为θ,得到这三者的关系如下
τ=kj·(q-θ)
(1)
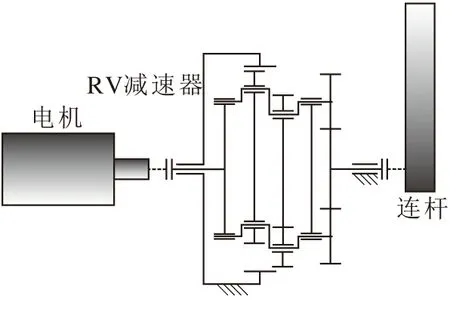
(a)机器人关节传动物理模型

(b)机器人关节传动简化模型
相对于机器人前三个关节来说,机器人的腕部三关节对机器人末端振动影响较小。基于这一点,在建立含有柔性关节的机器人动力学方程时,仅考虑其前三个关节的柔性,并且将小臂与腕部视为一个整体加以建模。经过试验测量[5],得到该型6R机器人的前三个关节的刚度值分别为:6.88×105Nm/rad、6.88×105Nm/rad与3.78×105Nm/rad。
2.2 机器人柔性臂杆模型
由材料力学知识可知,构件在承受外力条件下一定会产生变形。对于高度耦合的机器人,其臂杆的柔性变形对末端执行器位姿的影响较大,因此在建立机器人动力学模型的过程中有必要考虑机器人臂杆的柔度。
对于任一臂杆,在末端分别加上6个方向的广义力后,可以产生4种变形情况,即纵向拉伸、绕纵轴扭曲以及两个方向的弯曲。根据机器人的实际构造,可以发现其绕着连杆转轴的弯曲与关节柔性变形的方向是一致的,其对末端执行器位姿影响最大;另一方面,由机器人受力情况及截面特性(抗拉刚度及抗扭刚度较大)可知,其弯曲变形量较大,而拉伸、扭转变形量较小。基于上述原因,本文仅考虑绕关节转轴的弯曲变形,其受力及变形示意图见图4。
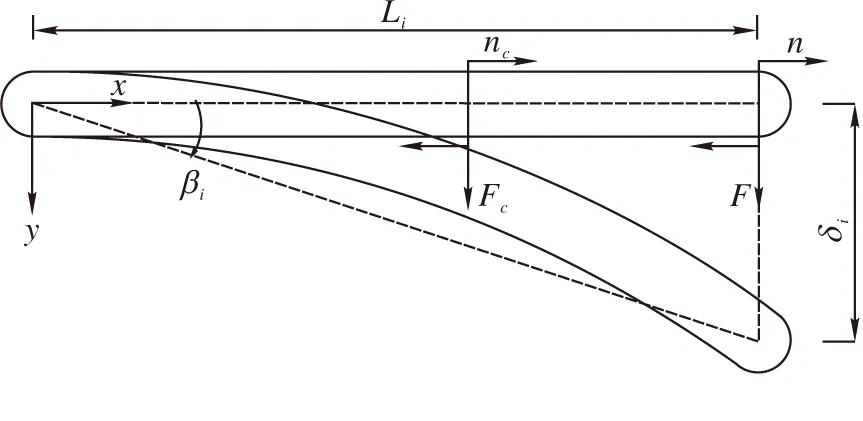
图 4 绕关节转轴的弯曲变形示意图
由图4,臂杆{i}在末端受到臂杆{i+1}绕z轴扭转力矩n及y向作用力F,在质心受到相同方向的惯性力矩nc及惯性力Fc,上述力与力矩所产生的变形方向与关节柔度产生的变形是相同的,产生的等效关节转角
(2)
式中,δi为连杆i末端产生的变形量;Li为连杆i长。
由机器人的构造可以明显看出,其大臂与小臂刚度最差,对末端执行器位姿影响最大,故本文只考虑大臂与小臂的臂杆柔度。为计算臂杆各加载类型下的柔度,根据实际结构,将大臂与小臂分别简化成空心方钢与实心圆棒,根据材料力学相关理论可以计算出各柔度值[6](表2)。
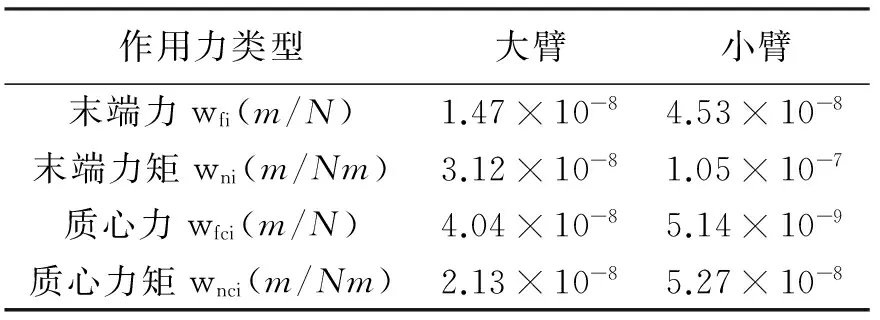
表2 各加载类型的柔度值
3 机器人柔体动力学方程
根据牛顿-欧拉法得机器人动力学[7]为
(3)
式中,M为n×n惯性力系数矩阵;C为n×n离心力系数矩阵;B为n×n科氏力系数矩阵;G为n×1重力矢量;F为n×1外部作用力矢量。
式(3)与式(1)、式(2)所述机器人柔度模型联合起来即为机器人柔体动力学模型,其物理模型见图5。

图 5 机器人柔体动力学物理模型
在外力作用下,设由关节柔度引起的关节角度偏差为αi,而由臂杆柔度引起的等效关节角度偏差为βi,关节规划角位移为qi,实际输出角位移
θi=qi-αi-βi
(4)
所以关节输出扭矩
τi=kjiαi=kji(qi-θi-βi)
(5)
另一方面,根据臂杆所受外力及其柔度可以求得由臂杆柔度引起的等效关节角度偏差
(6)
式中,δi、Li与式(2)完全一样,而δfi、δni、δfci、δnci则分别表示末端受力与力矩以及质心受力与力矩所引起的臂杆末端位移量。根据柔度、力与位移的关系,臂杆末端由臂杆柔度产生的总位移量可由下面的矩阵乘积得到
δi=[wli]T·[Fli]
(7)
式中,[wli]为臂杆的柔度向量,且[wli]T=[wfiwniwfciwnci],具体参数见表2。
[Fli]为臂杆受外力矢量,且[Fli]T=[ifi+1mini+1zifciminciz]T,m=x或y,视坐标系的方向而定。
将式(6)、(7)代入式(5),写成矩阵形式后再带入到式(3)所示动力学方程中即为综合考虑关节柔度与臂杆柔度的机器人柔体动力学方程,写成矩阵形式为
(8)
式中,q为规划关节变量,θ代表实际输出关节变量,Kj表示关节刚度矩阵,即Kj=diag(kj1、kj2、kj3),另一方面,式(8)中的系数矩阵与(3)式中的系数矩阵不一定完全相同,需要根据实际情况进行确定。
4 机器人初始位姿模态及仿真
4.1 6R机器人模态分析
为了分析得到柔性机器人的固有频率,运用模态分析理论[8]进行机器人初始加工位姿的模态求解。设多自由度系统的运动学方程为

(9)
其中,[M]、[C]、[K]分别为质量矩阵、阻尼矩阵及刚度矩阵,而{x}与{f}分别表示响应向量及外力向量。对式(9)进行Laplace变换,得到
([M]s2+[C]s+[K]){X(s)}={F(s)}
(10)
为了将其转化成一般特征值问题,式(10)被扩展为
([A]s+[B]){Y}={F'}
(11)
其中,
若外力向量为零,那么式(11)就成了关于实值矩阵的一般特征值问题,其特征方程为
det([A]s+[B])=0
(12)
由式(12)解得特征根s,其实部σr为阻尼因子,而虚部ωr则为阻尼固有频率。
对于机器人加工初始位姿,且末端无切削力的条件下(即自由振动),机器人柔体动力学方程中的速度与重力项对关节变量的实际输出影响较小,这里忽略不计[9],则式(9)变成
(13)
(14)
式中,初始位置质量矩阵
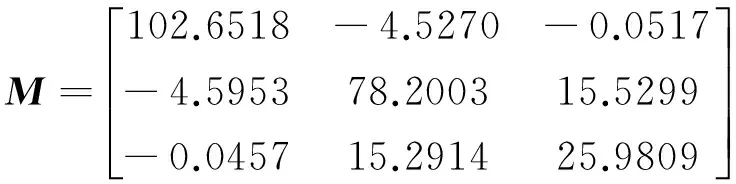
根据式(9)~(14),计算得到特征值,其虚部分别为136.77rad/s、81.41rad/s及88.64rad/s,即21.77Hz、12.96Hz、14.11Hz。
4.2 模态仿真验证
由于考虑了机器人的关节柔度及臂杆柔度,因此要建立刚柔耦合仿真模型[10]。首先在ADAMS中建立机器人的刚体模型,添加相应约束后,利用AZ()建立角位移测量函数,并在前三个关节处加上如下力矩驱动
τi=kji·(qi-θi)=kji·Δθi
(15)
然后利用柔性体替代刚性体模块将模态中性文件导入到现有刚体模型,刚性臂杆上的原有约束及驱动自动转移到柔体模型上,而原有marker点则转变成与之最近的节点。建立的刚柔耦合模型见图6,从图6中可以发现,在运动过程中,大臂与小臂是柔性的,图中的应力云图说明了这一点。

图 6 机器人刚柔耦合模型
利用ADAMS中的Vibration模块对虚拟样机模型进行了模态分析[11]。首先在末端刀具处建立了输入通道,用0.1~1000Hz的谐波力进行激励,并建立刀具x、y、z的三向输出通道。根据输入、输出通道的测试信号可以得到机器人系统的模态信息。机器人振动系统共有58阶模态,且为共轭关系,其固有频率从10Hz变化到16 000Hz,这是由关节柔度及臂杆柔度所决定的,关节柔度决定低频固有频率,而臂杆柔度决定高频固有频率。图7为刀具y向振动的模态参与因子曲线。
在图7中,左侧曲线峰值对应的频率为11.749Hz,中间曲线峰值对应的频率为13.804Hz,右侧曲线峰值对应的频率为21.380Hz,分别为第3、4与5阶模态频率,其他阶模态参与因子与之相比很小,可以忽略不计。表3给出了第3~5阶模态参数信息,包括固有频率、阻尼比以及留数,对比理论计算结果可以看出,二者十分相近,验证了理论分析的科学性。
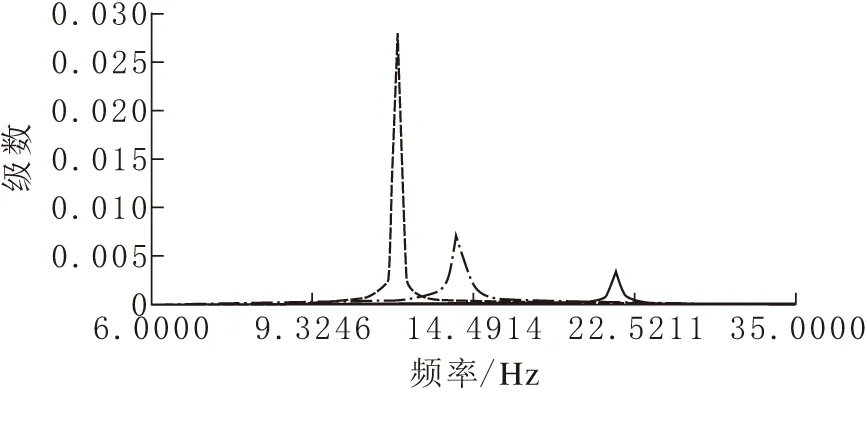
图 7 刀具y向振动的模态参与因子
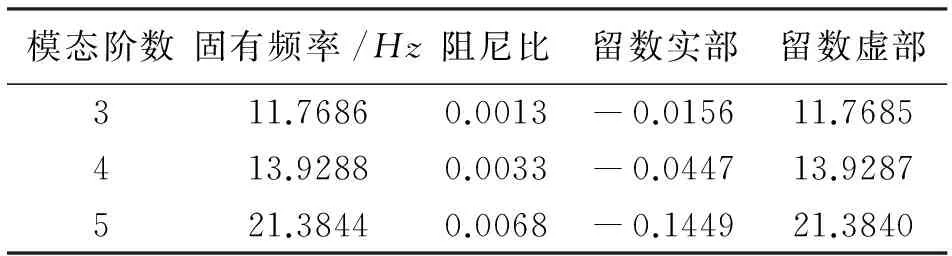
表3 第3~5阶模态参数信息
在模态变形方面,由后处理结果可知,第3阶模态变形为腰部、大臂、小臂绕关节1转动,第4阶模态变形为大臂、小臂绕关节2转动,第5阶模态变形为大臂、小臂绕关节2转动且小臂绕关节3转动,而其他阶模态变形都有臂杆变形的参与。分析上述3阶固有频率与理论计算结果的误差,一方面是因为对机器人柔体动力学方程进行了简化,未考虑重力项、速度项的影响;另一方面,在机器人柔体动力学模型中未考虑阻尼。
5 结语
本文在前人理论分析的基础上,首先建立了6R机器人的坐标系,然后,对机器人柔度进行了分析,建立了关节柔度及臂杆柔度模型,并结合牛顿-欧拉方法推导出了机器人柔体动力学方程;最后,运用模态理论分析了机器人的固有频率,并在建立刚柔耦合模型的基础上对机器人进行了仿真,验证了理论模型的正确性。
[1] 张永贵,刘文洲,高金刚. 切削加工机器人刚度模型研究[J]. 农业机械学报,2014(08):321-327.
[2]ReinlC,FriedmannM,BauerJ,etal.Model-basedOff-lineCompensationofPathDeviationforIndustrialRobotsinMillingApplications[C]. 2011IEEE/ASMEInternationalConferenceonAdvancedIntelligentMechatronics(AIM2011)Budapest,Hungary,2011:3-7.
[3] 潘 博,孙 京,于登云. 柔性关节空间机械臂建模、控制与仿真[J]. 系统仿真学报,2010(08):1826-1831.
[4] 熊有伦.机器人技术基础[M].武汉:华中科技大学出版社,1996:32-54.
[5] 陈玉山.6R型工业机器人关节刚度辨识与实验研究[D].武汉:华中科技大学, 2011.
[6] 刘鸿文.材料力学[M].北京:高等教育出版社,2004:176-194.
[7] 孔令富,张世辉,肖文辉,等.基于牛顿-欧拉方法的6-PUS并联机构刚体动力学模型[J].机器人,2004,26(05):395-399.
[8] 白化同,郭继忠,屠良尧.模态分析理论与试验.北京:北京理工大学出版社,2001:9-21.
[9] 赵欣翔.考虑关节柔性的重载工业机器人结构优化研究[D].哈尔滨:哈尔滨工业大学,2013.
[10] 王斌锐,方水光,严冬明.机器人手臂的刚柔耦合建模及摆动模态对比[J].中国机械工程,2012(17): 2092-2097.
[11] 武利霞,郭志平,张仕民,等. 基于ADAMS/Vibration的微型摆式内燃机的振动分析[J].噪声与振动控制,2008(01):7-9.
[责任编校: 张岩芳]
Flexible Dynamic Modeling and Modal Analysis of 6R Rrobot
LI Yuting1,LI Bo1,YAN Rong2,PENG Fangyu2,TANG Xiaowei2,CHEN Dingfang1
(1IntelligentManufacturingandControlInstitute,WuhanUniv.ofTech. ,Wuhan430063,China;2SchoolofMechanicalSci.andEngin. ,HuazhongUniv.ofSci.andTech.,Wuhan430074,China)
The paper firstly established a link coordinate system of 6R robot according to D-H method. On the basis of the coordinate system, flexible dynamic equations for the 6R robot were then given by means of Newton-Euler method considering joint flexibility and arm flexibility. Meanwhile, natural frequencies for the flexible 6R robot were calculated with modal theories. Finally, a rigid-flexible coupling modeling was set up for the robot, and simulation analysis was made with the model, and the results proved the validity of the dynamic modeling.
joint flexibility; arm flexibility; flexible dynamics; modal theories; rigid-flexible coupling
2015-04-20
李宇庭(1993-),男,湖北荆门人,武汉理工大学本科生,研究方向为机械设计
1003-4684(2015)04-0065-05
TP242.2
A
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
空气动力学学报(2022年4期)2022-08-23
黑龙江大学自然科学学报(2022年1期)2022-03-29
石油沥青(2021年5期)2021-12-02
文化创新比较研究(2020年7期)2021-01-13
软件(2020年6期)2020-08-13
中国机械工程(2018年20期)2018-11-09
光学精密工程(2016年1期)2016-11-07
浙江大学学报(工学版)(2015年2期)2015-05-30
噪声与振动控制(2015年4期)2015-01-01