
智能机器人研究初探
2015-09-16 00:42申耀武广州南洋理工职业学院广东广州510925
机电工程技术 2015年6期
申耀武(广州南洋理工职业学院,广东广州510925)
智能机器人研究初探
申耀武
(广州南洋理工职业学院,广东广州510925)
智能机器人正逐渐广泛且深入的影响着人类的生活形式。从智能机器人基本定义、发展沿革及智能机器人分类三个方面对智能机器人进行探析。
人工智能;智能机器人;发展沿革
0 引言
智能机器人的研发与其应用,早已吸引世人的目光与重视。许多先进国家的政府,如美、日、德、英与欧盟国家等,更不断地投入大量的科研经费与人才培育。美国微软总裁比尔·盖茨曾预测“在2025年前每个家庭内都会有机器人”。广泛定义的智能型机器人和相关智能型机器人技术未来很可能成为全球最大规模产业,智能型机器人和相关技术将彻底改变你我未来的生活。
1 智能机器人基本定义
智能机器人是具有人工智能的机器人,捷克著名作家Karel Capek于1920年的剧作《Rossums universal robots》里创造了“Robot”这个名词来描述工厂里的奴隶,Robot中文翻译为机器人,“机器人”中虽然有一个“人”字,但Robot本身其实跟人类并没有特别连结的意义,只是Robot最初因缘际会被翻译成机器人后就沿用至今。牛津字典将Robot解释为“一部机器,它可在电脑控制下或全自动执行一些人类可以办到的工作”[1]。英文版维基百科将Robot定义为“一种机器或虚拟人工个体,通常是一部由电脑程式或电路指挥的电机机器”。所以说,机器人的外形并不限定为人类形状,它也可以具备其他动物形状、植物形状、自然界存在的物体形状或任何人造形状。机器人基本上只是一种电整合装置,并具备一定的程序规划后自动执行指定功能或动作的能力,通常包含结构、机构、感测单元、动力单元、控制单元、通讯单元和计算单元等要素[2]。
2 智能机器人发展沿革
1927年,世界上第一部真正的机器人“Tel⁃evox的人形机器人”在美国被建造出来,如图1所示,可藉由电源线、无线通讯和电话线来进行远端控制仪器的操作。
1942年6月,维拉德·波拉德取得一件由电力控制系统与机械手组成的喷漆器美国专利,这是一件具产业应用价值的并联机器人,如图2所示。
1948年,英国机器人技术先驱——威廉格雷沃尔特发明了机器人埃尔默与埃尔西,如图3所示,以非常简单的电子设备来模拟栩栩如生的行为。

图1 Televox人形机器人
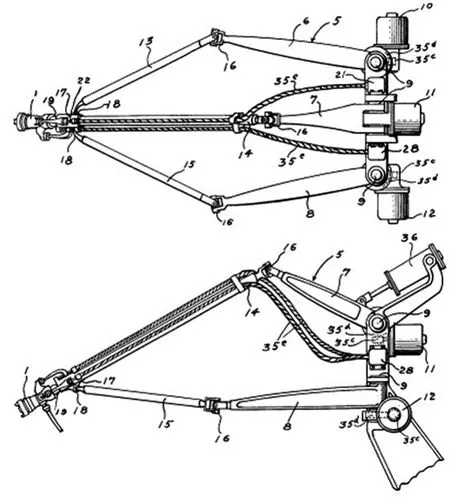
图2 第一个三维的工业并联机器人

图3 埃尔西机器人
1950年阿兰·图灵所出版的《计算机械与智能》中,提着一个称为“图灵测试”的测试方法,可以来确认机器是否有思考能力。
1954年,乔治迪沃尔和卓·英格列柏格设计出第一台可编程的机械手臂——Unimate,如图4所示,并随后在1962年演化成为第一台工业机器人,在通用汽车公司的装配线上执行危险及重复性的工作。

图4 Unimate机器人
1959年麻省理工学院的伺服系统实验室展示了先进的电脑辅助制造技术,应用由该校自动编译工具专案创造的语言APT,1963年,斯坦福大学也紧接着创造了第一批可由电脑控制的人造手臂——Ranchoarm,如图5所示。
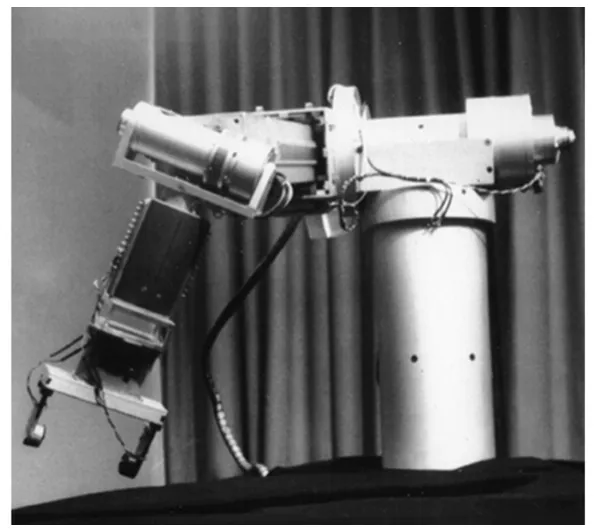
图5 Rancho Arm
1969年斯坦福大学人工智能实验室的机械系学——维克多许维门制造出了Stanford arm,如图6所示,此手臂的设计后来演变成一个机器手臂设计标准,至今仍影响现代的机械手臂设计准则。

图6 Stanford Arm
1970年,苏联成功将月球表面探索车“月球车一号”登陆在月球上,如图7所示,是第一部可藉由远程控制技术,在莫斯科即时引导在月球表面运动的机器人。

图7 月球车一号

图8 Puma工业机器人
1974年3月,沙因曼教授设计出采用微型计算机来控制的机械手臂,并采用小零件装配和触控压力传感器的反馈设计。1978年,Unimation公司生产了世界上第一台工业机器人Puma,如图8所示,可编程后自动进行一般性装配任务,并使用于通用汽车公司。这部性能卓越的工业机器人在很多年后仍在许多研究实验室中使用。
1981年,塔卡欧·卡纳内开发出世界上第一个“直接驱动机械手臂”,让机械手臂更快和更准确。1986年本田公司推出仅有双足的第一部人形机器人E0,用来验证双足行走理论,如图9所示,最早的原型机,必须花5秒才能走一步,且只能走直线。

图9 最早人形机器人
1992年,约翰·阿德勒博士提出了“电脑刀”的创新概念,也是后来外科机器人的始祖。电脑刀是一部机器,可先用X光观察病人的肿瘤,并在发现肿瘤时施加一个预先算好剂量的辐射。1994年,卡内基·美隆大学的八足行走机器人“但丁2号”成功地下降到斯波尔山火山口内收集火山气体样品,如图10所示。

图10 但丁2号
1996年麻省理工学院的大卫·巴雷特设计了一部模拟真鱼运动方式的机械鲔鱼,如图11所示,希望让未来的机器潜艇具备鲔鱼游泳方式的高效率。

图11 机械鲔鱼
1997年,美国国家航空航天局成功执行火星探路任务,将“旅居者”探测车送上火星表面,并在后来的两个月期间继续传回从火星表面收集的数据,如图12所示。
1999年,SONY公司发布第一个量产版本的AIBO机器狗,如图13所示,具有学习、娱乐和与主人沟通的能力,后来几年陆续推出几版更高规格的机器狗。
2000年,本田公司首次亮相一部非常近似人类的ASIMO人形机器人,如图14所示。ASIMO重量轻,且具有精良的步行技术,有充分的自由度,可同时操作双臂和双足来执行动作,其优美的外形和逼真拟人化的动作很快地风靡全世界。

图12 旅居者探测车

图13 AIBO机器狗

图14 ASIMO人形机器人
2002年,麻省理工学院的李奥纳多机器人,如图15所示,被设计来协助机器人和人互动和合作的研究,该项目的目标之一是使未受过训练的人们有可能与机器人进行互动并更快速地教导机器人。

图15 李奥纳多机器人
2004年,爱普生公司发表当时全球最小机器人,如图16所示,仅7厘米高,重10克。此直升机机器人可使用装载的摄影机到发生自然灾害的现场上空搜集资料。

图16 爱普生最小飞行机器人
2005年,波士顿动力公司开发了一部大狗机器人,如图17所示,因为卓越的动态平衡控制技术和配备了战斗机等级的高速反应加速度计,大狗机器人具备了绝佳的动态平衡能力,可不受地形限制,背负重物和补给。

图17 大狗机器人
2007年,迪安·卡门研发了可由头脑控制动作的机械义肢手臂,如图18所示,这种具备精密机械设计的机械义肢已经被很多截肢者使用。

图18 机器义肢
2009年,日本研究机构——国家先进工业科学和技术研究所推出HRP-4C女性人形机器人,如图19所示,具有一颗仿真人脸机器头,希望双足人型机器人可以藉由具备人类的外观而被人类社会接受。
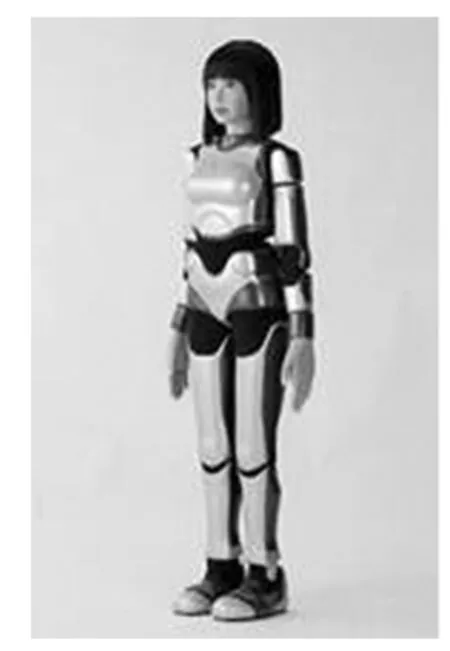
图19 HRP-4C机器人
2010年,Google公司开发出无人驾驶车,美国内华达州立法通过,2012年5月开始正式允许无人驾驶车在道路上驾驶。Google已拿到第一张无人驾驶车执照。
2012年,美国国家航空航天局开发了好奇号火星探测车,如图20所示,好奇号已实际登陆火星上的“盖尔撞击坑”内,通过地球发射到火星的无线电信号控制下,进行铲土、清理、采集及分析沙坑内部地质样本等工作。

图20 好奇号探测车
3 智能机器人分类
智能机器人的种类非常多,本文依据功能或型态分别介绍几种较常看到的智能型机器人[3-5]。
(1)机械手臂或工业机器人
机械手臂或工业机器人被使用在许多制造场合上,形式有很多种,常被使用的是多关节式机械手臂和直角坐标系机械手臂。机械手臂具备的自由度不一,从最简单的单轴机械手臂到复杂的7轴关节式机械手臂。机械手臂或工业机器人的成本颇高,但因具备高精准度、高可靠度、高耐用度等三高特质,普遍用到汽车工厂包括半导体厂和LCD厂等大型电子资讯产业工厂。
(2)人形机器人
人形机器人具备人类的形状,通常具有头、身躯、双臂和双腿,但是也有一些人形机器人仅具备腰部以上的结构,腰部以下从缺或以轮型移动平台取代双足。人形机器人的研究以日本为主要发展国家,但最近几年,美国、法国等许多国家也在人形机器人的研究上有很好的成果。人形机器人的最大优势应该是跟人类外形相似,最容易被接受在与人共处的环境内执行与人互动等一类原本人类执行的工作。
(3)家庭机器人
家庭机器人是泛指使用在家庭并替人类提供各式服务的机器人。家庭机器人目前包括吸尘机器人、拖地机器人、除草机器人、清洁游泳池机器人、监视保全机器人、教育娱乐机器人、伴侣机器人等。未来将有更多提供各式功能的家庭机器人进入家庭。吸尘机器人因为它的性价比高,虽然功能有限,但可以实际协助人类执行部分清洁工作而受到青睐,已成为除机械手臂外被人类实际使用数目最多的一种机器人。
(4)军用机器人
军用机器人是指被用来执行跟国防或军事相关任务的机器人。最早在第二次世界大战中,德国就发展出可遥控的移动型炸弹/地雷机器,苏联也发展出远端控制无人战车。后来这种类型的机器人延伸到包括炸弹处置机器人、运输机器人、搜索和战斗机器人、无人侦察机、无人攻击机等。军用机器人领域目前的最大发展领域为无人驾驶战斗机和无人驾驶轰炸机。
(5)娱乐和教育机器人
娱乐机器人是指用来与人互动,提供人类各式乐趣的机器人。教育机器人则藉机器人与人互动功能教导人类,特别是小孩们,学习某些特定知识。这类别娱乐和教育机器人也能直接让某些人类受惠,且价格合宜,因此较容易进入市场,但是如果功能无法持续扩充,要长期被社会接受将是严格挑战。北京紫光优蓝机器人公司于2001年推出爱乐优家庭亲子机器人,成为全球第一部成功进入家庭的教育娱乐机器人。
(6)太空机器人
太空机器人指的是被使用在外太空的各式机器人,主要功能包括勘探、搬运、收集和检修维护等功能。已被人类使用的太空机器人包含被美国、中国和欧盟送往月球和火星表面收集资料的多部勘探机器人,在太空梭上执行搬运货物的遥控机械手臂系统和在太空站内使用的各式机器人。2012年8月美国的探勘机器人“好奇号”成功地从火星表面传回振奋人心的清晰影像,未来也将在火星表面持续地收集情报的工作[5]。
(7)远端操控机器人
远端操控机器人主要指可由人类在机器人现场以外,藉由无线通信、网络或卫星通讯等方式指挥以执行特定任务的机器人。远端操控机器人的两个主要元素是“远端操作”和“远端亲临现场”。许多远端操控机器人被用来处理威胁或紧急事故区域内人类不适合在场但必须解决的问题,如日本核能发电厂因海啸发生的核泄漏事故后,一些远端操控机器人就被遣送入发电厂内高危险区域处理紧急事故。
(8)医疗机器人
医疗机器人使用在医疗、检验、医疗型陪伴和训练医疗相关技术等场合,包括可用来执行外科手术的达文西机器人、利用模拟人体回馈资讯来训练医师和护士的训练机器人、可陪伴孤独或失忆老人和自闭症儿童,并与其互动的抚慰机器人、帮无法自行进食病人喂食的喂食机器人、可在远端医师指挥下即时移动到病房以视频跟病人或护士对谈问诊的远距看诊机器人和可轻易置入人体进行体内检测工作的微小检测机器人等。人类社会老龄化问题日趋严重,医疗机器人已成为许多先进国家发展智能型机器人的重点项目。
(9)柔性机器人
柔性机器人是指一部机器人的整体或部分具有柔软的外表或身体,用来模拟生物的特性,以利执行特定任务的目标,是机器人仿生学中一个重要的研究领域。典型柔性机器人范例的机器章鱼,整个身体和触须都由软性材料构成,柔性机器人可藉由柔软的外表和身躯,执行一般刚性机器人无法完成的工作。
(10)群组机器人
群组机器人是指一群具有相同功能和架构的机器人,类似群居动物的蜜蜂、蚂蚁或迁移的鸟群般,以多数机器人协同行动的特性达成特定任务。每一个个体机器人相对架构简单,因此个体机器人的任务清楚简单,但如何协同指挥和操控大数量的个体机器人以期获得最大整体利益,则是一件非常困难和复杂的任务。目前群组机器人还是以理论的发展为主,较具潜力的使用场合仍是以军事用途为主。
(11)纳米机器人
纳米机器人是指超微小机器人,其尺寸是以10-9m为计算单位,伴随着医学科技的进步和老龄化社会带来的商机,已成为一项新型机器人领域。研究学者希望未来能制作出像细菌或病毒大小的纳米机器人,能被轻易地送入人体特定部位执行如消灭细菌和病毒、修复细胞或修正体内组织等各种微观任务。
(12)模块化机器人
模块化机器人主要架构是由多个具有相同功能和构造的模块,以特定组合方式所组成。当这些模块重新改变其组成方式,形成另一种新结构外形或新型态时,也可能构成另一部具有相同或不同功能的模块化机器人。许多学者已研发出可自行改变机器人型态的模块化机器人,这些机器人可主动根据环境或任务的需求,重新调整模块型态,以不同的模块连接方式组成一部新机器人,以利自我修复或成功执行任务。
4 结论
现代社会,人们的工作几乎都有电脑的参与,而智能机器人是电脑升级版的应用,机器人技术在引领著一场新的技术革命,智能机器人是社会发展的必然产物,而且如大浪滔滔,势不可挡。
[1](德)Hendrik Skubch著,连晓峰译.自主移动机器人行为建模与控制[M].北京:机械工业出版社,2014.
[2](美)Roland Siegwart,(美)Illah R.Nourbakhsh,(美)Davide Scaramuzza著,李人厚,宋青松译.自主移动机器人导论[M].西安:西安交通大学出版社,2013.
[3]朴松昊,钟秋波,刘亚奇,等.智能机器人[M].哈尔滨:哈尔滨工业大学出版社,2012.
[4]GCtronic.(2012).EPFL educationaland researchmini mobile robot[EB/OL].http://www.gctronic.com/ e-puck.php.
[5]NASA.(2012).Mars Science Laboratory[EB/OL]. http://www.nasa.gov/mission_pages/msl/news/ msl20120803.html.
(编辑:阮毅)
Intelligent Robot Research Study
SHEN Yao-wu
(Guangzhou Nanyang College,Guangzhou510925,China)
Intelligent robots are gradually widely and deeply affecthuman life forms,this paper from the basic definition,the evolution and developmentof the intelligent robotand intelligent robotclassification threeaspects to carry on analysis to the intelligent robot.
artificial intelligence;intelligent robot;evolution
TP242
A
1009-9492(2015)06-0047-05
10.3969/j.issn.1009-9492.2015.06.011
2014-12-12
申耀武,男,1979年生,山西晋中人,硕士,讲师。研究领域:机电一体化技术。
猜你喜欢
鸭绿江·华夏诗歌(2021年7期)2021-09-13
今日农业(2020年14期)2020-12-14
当代工人(2020年8期)2020-05-25
小学科学(学生版)(2019年7期)2019-08-01
疯狂英语·爱英语(2018年12期)2018-08-13
小溪流(画刊)(2017年12期)2018-01-10
金色少年(奇趣科普)(2016年8期)2016-09-21
我爱学(创意美术与手工)(2016年4期)2016-07-14
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25
少儿科学周刊·少年版(2015年4期)2015-07-07
