
履带式平板运输车电气系统
2015-09-16 00:42安玉忠安欣中海油有限公司天津分公司天津30045河北工业大学天津30030
机电工程技术 2015年6期
安玉忠,安欣(.中海油有限公司天津分公司,天津30045;.河北工业大学,天津30030)
履带式平板运输车电气系统
安玉忠1,安欣2
(1.中海油有限公司天津分公司,天津300452;2.河北工业大学,天津300130)
提出一种新型近海滩涂履带式平板运输车,该运输车是近海滩涂地区专用的重载运输工具,采用全闭式液压系统,电液控制方式,及差速转向控制技术,对该车电气控制系统组成、功能及控制技术等予以简要介绍。
水陆滩运输;履带式平板运输车;差速转向;电气控制系统
0 前言
随着国内风电产业的飞速发展,风电设备吊装所用起重机单机额定起重量也越来越大,同时对吊装风电设备用起重机的重载型运输工具需求也越来越大。但目前承担滩涂运输的运载工具仍以民用拖拉机为主,偶尔也有专业的运载工具使用,如中国一拖集团有限公司生产的东方红-120R履带式运输车,但是该履带式平板运输车并不是为风电滩涂区域专门设计,而是一种滩涂、沙漠、低湿地等条件下通用的运载工具,且该车控制为液压控制方式,也严重不能满足大型风电设备运输的要求。因此,迫切需要专门设计一种新型的、适用于滩涂地区的重载运输工具。根据市场实际需求,本文提出一种新型履带式运输车辆,采用全闭式液压系统,利用电液控制方式,采用先进控制理论,实现节能降噪、环保的目的。本文将简要分析履带式平板运输车的电气控制系统。
1 运输车电气系统构成
履带式平板运输车主要作业于近海潮间带,用作近海系列风力发电机组基础施工设备、安装设备的运输。履带式平板运输车电控系统主要包括以下几个部分:动力系统控制;液压系统控制;人机界面(HMI);辅助电器控制。上述四部分中动力系统控制、液压系统控制为电控系统设计的重点。除去人机界面外,其余部分都由检测元件、控制部件、指令输入设备和最终执行部件组成。系统经由CAN总线进行通信,如图1所示。
在满足设计要求的基础上,硬件连接线路越简单、控制器之间的通讯越少越好。这在客观上要求线路中的接插件要合理布置,兼顾安装和维修的方便性。因此,采用如图2所示的分布式布置方式。所有控制器都放置于主驾驶室电气柜内,布置多个分线盒,实现了集中——分散——集中的分布方式,线路简单明了,便于布置。

图1 履带式平板运输车电气控制系统
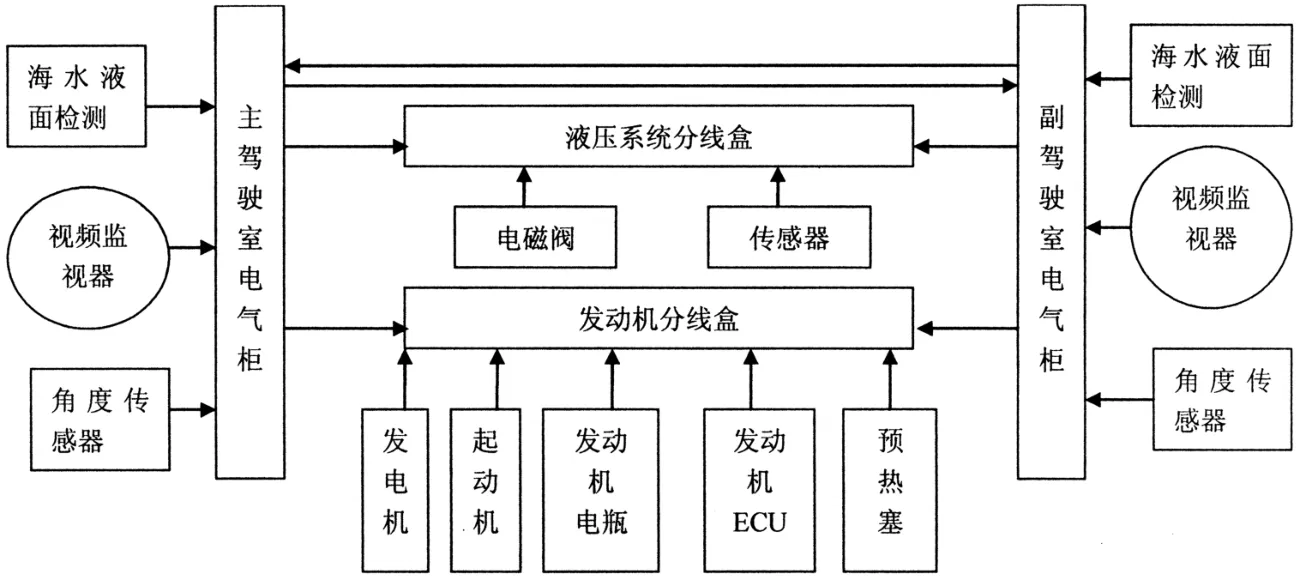
图2 电气系统的分布式布置
2 发动机控制
发动机与变量泵功率匹配控制控制包括2个基本方面:(1)负载适应模式控制,其作用是根据作业工况负荷变化选择发动机功率模式,通过负荷感应的智能化控制,使发动机输出功率按照负荷实际消耗功率匹配输出;(2)发动机极限功率模式控制,作用是当发动机处于极限功率时,智能调节泵的排量,改变外界负载使之适应发动机的功率,防止因外界负荷变化而改变发动机转速,使系统始终工作在最佳工作点附近,进而稳定发动机工作转速,防止发动机转速下降过快而熄火,保证系统节能。
2.1负载适应模式
所谓负载适应模式,就是改变发动机的功率来适应外界负载的要求,满足使用性能[1]。负载适应模式是一种开环控制方式,控制器将检测到的负载信号发送给发动机ECU,根据外界负载计算所需发动机功率,进而控制发动机喷油调节机构,改变喷油量,从而实现发动机对外输出功率的改变,适应负载的需求,其原理如图3所示。

图3 负载适应模式的控制原理
通常而言,负载检测可通过两种途径来实现:一是检测电控操作手柄的动作,再根据手柄动作识别负载的大小;二是检测液压泵的出口压力,进而判断出此时的负载情况。本文所提及的履带运输车综合应用了上述两种负载检测方式。
2.2极限功率模式
极限功率模式控制是一种自动调节变量泵排量的智能控制技术,其基本原理是:当变量泵的吸收功率大于发动机的输出功率时,控制器自动降低变量泵的吸收功率,保护发动机不过载,使发动机工作在一个较好的工况下[2]。
极限功率控制主要由两部分组成:
判断泵的吸收功率PP是否大于发动机的输出功率PE,即PP>PE是否成立;
当PP>PE时,快速减小泵的排量,降低泵的吸收功率,使发动机回到正常转速区域内。
极限功率控制模式中,若系统判断出泵吸收功率PP大于发动机输出功率PE,需要进行调节后,系统迅速做出响应,降低变量泵的排量,使发动机转速回到允许的转速范围内。调节方式一般采用PID调节方式。
控制框图如图4所示。
3 液压系统控制及差速转向模式
与传统的履带式平板运输车辆转向时利用后桥转向离合器(制动器),改变快慢侧驱动轮上的驱动扭矩,使两侧履带产生不同的驱动力,从而形成转向力矩来实现转向的“差力转向模式”相比,本文所提及的履带式运输车采用了“差速”转向模式。

图4 极限功率PID控制原理
“差速”转向的基本工作原理是:通过不同开度的手柄,分别控制左右两侧履带的速度,因左右两侧行走速度不同,形成相对速度差,与地面相对滑移过程中实现了转向的功能。控制两手柄的不同开度,理论上可实现转向半径大小的无极改变。
4 结语
本文介绍了履带式平板运输车电气控制系统的组成、功能及相关控制方式;阐明了发动机与变量泵的两种匹配方式,提出了差速转向控制模式,并在实际车辆中取得了良好的应用效果。
发动机采用了两种控制模式:负载适应控制模式和极限功率控制模式,使发动机与液压泵的匹配更为科学合理,同时,增加了可操作性,更好地保护了发动机;
采用了差速转向模式,增强了履带运输车的机动性和合理性。
更经济、更节能。由于采用功率极限控制作用,减小了发动机功率储备,降低了履带运输车的制造成本。
[1]陈欠根,李延伟,郝鹏.液压挖掘机负载自适应全局功率匹配控制系统[J].工程机械,2007(38):21-24.
[2]史金钟,徐玉梅,刘华,等.东方红-120R履带式运输车静液压传动系设计[J].液压与气动,2005(05):19-21.
(编辑:向飞)
Electric System for Crawler Flat-Bed-Transporter
AN Yu-zhong1,AN Xin2
(1.CNOOCChina Limited,Tianjin Branch Company,Tianjin300452,China;2.HebeiUniversity of Technology,Tianjin300130,China)
In this report a new crawler flat-bed-transporter on the offshore beach is proposed.Such a transporter is used specifically for heavy-load transportation in offshore area with mudflats.It adopts a fully closed hydraulic system,electro-hydraulic control and differential steering control technique.Brief introduction of the composition,function and control technique of the electric control system are given in the paper.
land and water bank transportation;crawler flat-bed-transporter;differentialsteering;electric controlsystem
U469.694
A
1009-9492(2015)06-0082-02
10.3969/j.issn.1009-9492.2015.06.020
2015-02-04
安玉忠,男,1968年生,河北人,大学本科,工程师。研究领域:机械设备。已发表论文1篇。
猜你喜欢
儿童故事画报·自然探秘(2022年3期)2022-04-27
电子制作(2019年15期)2019-08-27
三门峡职业技术学院学报(2019年1期)2019-06-27
消费导刊(2018年10期)2018-08-20
水利科技与经济(2016年8期)2016-04-22
电测与仪表(2016年6期)2016-04-11
专用汽车(2016年9期)2016-03-01
专用汽车(2016年4期)2016-03-01
汽车维修与保养(2015年2期)2015-04-17
淮南师范学院学报(2015年3期)2015-03-22
