基于指令力矩螺旋式搜索的SGCMG奇异规避方法*
2016-04-13 02:27孙羽佳袁利雷拥军
空间控制技术与应用 2016年6期
孙羽佳,袁利,2,雷拥军,2
(1.北京控制工程研究所,北京100190;2.空间智能控制技术重点实验室,北京100190)
基于指令力矩螺旋式搜索的SGCMG奇异规避方法*
孙羽佳1,袁利1,2,雷拥军1,2
(1.北京控制工程研究所,北京100190;2.空间智能控制技术重点实验室,北京100190)
针对航天器的控制力矩陀螺群框架构型奇异以及传统奇异规避方法在规避时存在的框架“锁死”问题,本文提出一种基于指令力矩进行螺旋式搜索的控制力矩陀螺奇异规避方法.该方法在鲁棒奇异逆操纵律和零运动操纵律的基础上,引入随奇异度量值自主调节的旋转角和随时间连续变化的旋转轴,让期望力矩通过搜索寻找出逃离奇异状态的方向,来实现奇异规避.仿真结果表明该方法具有良好的奇异规避特性,并能够克服常规奇异规避方法存在的框架“锁死”情况.
奇异规避;框架锁死;螺旋搜索;单框架控制力矩陀螺
0 引言
敏捷卫星是具备快速姿态机动能力的航天器,当今世界各国在发展敏捷卫星时都对卫星的敏捷姿态控制能力提出了严格的要求,而单框架控制力矩陀螺(single gimbal control moment gyro,SGCMG)具有机械简单和输出力矩大等优点,能够实现既快速敏捷机动又保持高精度的控制目标.但框架系统存在的奇异问题,给系统操纵律的研究和设计带来很大的困难.Margulies等人最早建立了SGCMG奇异问题的基础理论[1],此后,国内外学者针对奇异的几何和数学特征进行了进一步的探索和研究[2-3],同时也尝试了许多规避奇异的方法.
根据操纵律在控制系统中所处的地位和信息处理方式,操纵律可以分为全局操纵律和局部操纵律[4].全局操纵律如直接搜索法[5]、最优初始框架角操纵律[6]、全局离线规划操纵律[7]等,考虑了系统的长期行为,具有较好的全局回避性能,但需要不断地规划调整,因而计算量较大,不适合实时控制.局部操纵律根据期望控制力矩和当前框架角的值来计算框架转动角速率指令,适合实时控制,目前存在主要包括伪逆操纵律、带零运动的操纵律以及奇异鲁棒逆操纵律[8]等.
CMG框架构型奇异点可分为显奇异点和隐奇异点.零运动通过对框架角重新构形的方式仅可对隐奇异点进行有效规避.目前大多数奇异规避方法研究,如通过引入力矩扰动的鲁棒操纵律,主要是针对显奇异点的规避问题.然而传统鲁棒奇异规避算法存在控制力矩陀螺框架构型“锁死”现象,会导致航天器暂时失去姿态控制能力而影响姿态机动性能.
针对框架“锁死”问题,Oh H S和Vadali S R分析了SRI操纵律中存在的框架“锁死”问题,提出对控制律增益矩阵添加非对角的反对称摄动矩阵以求避免出现该问题[7];Wie B给出了该现象合理的数学解释[8],并对鲁棒奇异规避算法进行改进[9-10],将其中的防奇异因子矩阵优化为非对角线元素不为零的矩阵,并进一步优化为非对角线元素在时域周期变化的摄动矩阵,以及将框架角速率权阵改成非对称阵.仿真显示该方法能够脱离某些饱和奇异类型,但目前尚无文献对其做深入的理论分析,且为了同时满足对星体姿态扰动尽量小的要求,需要对算法中的多参数以仿真试凑方式进行选定.
针对传统框架奇异规避方法存在的框架“锁死”问题,本文提出了一种基于指令力矩进行螺旋式搜索的SGCMG奇异规避方法.该方法引入随奇异度量值自主调节的旋转角和随时间连续变化的旋转轴,让期望力矩在奇异点及其附近直接偏转寻找脱离奇异状态的方向.
1 问题描述与说明
在星体坐标系中,单框架控制力矩陀螺的力矩可简单的表示为

式中,J(x)为雅克比矩阵,其第i个列矢量为第i个 SGCMG在星体坐标系的输出力矩的单位矢量;,xi为第i个SGCMG框架角;h0为每个SGCMG角动量的模.
若给定指令力矩τ,则可以得到指令框架角速度:

式中,J+为雅克比阵的伪逆,其存在性由rank(J)决定.当J不满秩时,就无法直接得到有效的框架角操纵律,产生奇异.所谓奇异是指,在某种框架角组合下,沿某一方向无法输出力矩,丧失了三维控制能力.在奇异状态下,若由奇异鲁棒操纵律计算得到的框架角速度指令始终为0,则框架“锁死”,此时整个系统将处于奇异状态无法逃离.
2 防框架“锁死”的奇异规避操纵律的设计
2.1 带零运动的奇异鲁棒逆操纵律
文献[11]给出了基于梯度矢量的零运动鲁棒伪逆操纵律

式中,λ为鲁棒奇异规避强度系数,D=|JJT|为奇异测度,α为零运动奇异规避强度系数,I3为单位阵.
(1)λ的选取方式
为了防止在远离奇异状态时产生力矩误差,令λ随奇异度量值改变,且随D的减小而增大.因此设定如下选取方式:

式中,k1≥0为鲁棒奇异规避强度增益系数,d1>0为鲁棒奇异规避启动阈值.
为了防止λ过大,对其进行限幅处理:若λ>λs,则λ=λs.其中,λs>0为限幅值.
(2)α的选取方式
同理,α的选取也与奇异度量值相关

式中,d2>0为零运动奇异规避启动阈值,且d2≥d1,k2≥0为零运动奇异规避强度增益系数,αs≥0为偏置量.
带有零运动的奇异鲁棒逆操纵律可以有效的规避一些奇异点,但会在一些奇异点处发生框架“锁死”的现象,为了防止这种现象的发生,本文希望在奇异鲁棒逆和零运动操纵律的基础上,通过对指令力矩进行调节,让指令力矩逃离奇异状态的方向.采用的调节策略是当指令力矩接近奇异方向时,让指令力矩在其附近进行偏转,螺旋式的搜索最近的可以逃离奇异状态的方向.
2.2 基于指令力矩螺旋搜索规避算法
基于指令力矩螺旋搜索规避算法的具体思路如下:
让期望力矩指令τ以图1(a)中τ所在的方向为偏转轴,以f(D)为偏转角在空间内进行连续的旋转搜索,直到脱离奇异状态.可将其拆解成两部分,首先令指令力矩τ绕与其正交的任意旋转轴r旋转θ,得到一个旋转后的力矩向量t;然后力矩向量t再以期望指令力矩τ的原方向为旋转轴进行旋转.当旋转轴r选取不同时,所得到的力矩向量t的方向也是不同的,随着旋转轴的改变,可得到所有的力矩向量t组成一个锥面,如图1(a)所示.当旋转角θ= f(D)是随奇异度量值变化,则达到螺旋式搜索的效果,如图1(b)所示.
用数学方法描述,可将以上过程分解成两次旋转.即τcad=R2R1τ,其中,R1是指令力矩旋转矩阵,R2是t=R1τ绕指令力矩旋转矩阵,均由罗德里格旋转公式得到.

图1 指令力矩螺旋搜索示意图Fig.1CMG singularity avoidance method based on command torque vector helix search
1)指令力矩旋转矩阵R1

2)t=R1τ绕指令力矩旋转矩阵R2

最终得到SGCMG框架角速度指令向量

其中,α和λ与式(3)取值方式相同.
3 仿真验证
为了验证本文提出的单框架控制力矩陀螺奇异规避方法的有效性,以β=54.74°的金字塔构形为例,对式(3)和式(6)进行仿真比较.设期望力矩,将初始框架角设为,综合考虑各个操纵律的调度问题,选取其它的仿真参数见表1.

表1 仿真实验参数Tab.1Simulation experiment parameters
(1)带零运动的鲁棒奇异规避算法仿真结果
(2)指令力矩螺旋式搜索的奇异规避方法仿真结果

图2 带零运动的鲁棒奇异规避法的框架角Fig.2Gimbal for SR with null motion

图3 带零运动的鲁棒奇异规避法的框架角速度Fig.3Gimbal rates for SR with null motion
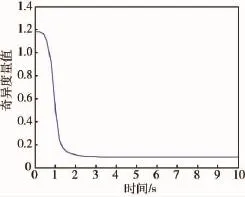
图4 带零运动的鲁棒奇异规避法的奇异度量值Fig.4Singularity measurement for SR with null motion

图5 带零运动的鲁棒奇异规避法的角动量Fig.5Momentum for SR with null motion
由图7可知系统并没有发生框架“锁死”现象,指令力矩螺旋式搜索法能够有效的阻止奇异度量值减小,并且有所升高,以远离奇异状态;图8在奇异度量值较小时所计算出来的框架角速度指令变化的剧烈程度相比奇异值较大时变化不大,表明该方法具有良好的奇异规避特性;图9中系统能够快速的到达角动量外饱和面.由图6~9可知通过指令力矩螺旋式搜索法可以实现在接近奇异状态时的有效规避,并能够克服常规奇异规避方法存在的框架“锁死”情况,保证系统机动良好性能.

图6 指令力矩螺旋式搜索法的框架角Fig.6Gimbal for command torque vector helix search

图7 指令力矩螺旋式搜索法的奇异度量值Fig.7Singularity measurement for command torque vector helix search

图8 指令力矩螺旋式搜索法的框架角速度Fig.8Gimbal rates for command torque vector helix search

图9 指令力矩螺旋式搜索法的角动量Fig.9Momentum rates for command torque vector helix search
4 结论
本文通过对指令力矩进行螺旋式搜索,令其在控制力矩陀螺框架奇异或接近奇异的状态时,以指令力矩为中心的范围内快速的自主偏转,偏转角度随奇异度量值大小改变.该方法具有直观的物理意义,参数易于选取.仿真实例表明该方法能够有效的克服在框架“锁死”时力矩指令与其特定方向重合而无法脱离的情况,解决了在现有技术在奇异规避过程中所存在的框架“锁死”问题.然而,关于指令力矩的改变对整星姿态机动效果的影响还需要进一步的分析.
[1]MARGULIES G,AUBRUN J N.Geometric theory of single-gimbal control moment gyro systems[J].Journal of Astronautical Sciences,1978,26(2):159-191.
[2]WIE B.Singularity analysis and visualization for single gimbal control moment gyro systems[J].Journal of Guidance Control and Dynamics,2004,27(2):271-282.
[3]张锦江.单框架控制力矩陀螺系统的构型分析和对比研究[J].中国空间科学技术.2003,23(3):52-55. ZHANG J J.Research on configuration analysis and comparison of SGCMG system[J].Chinese Space Science and Technology,2003,23(3):52-55.
[4]KUROKAWA H.Survey of theory and steering laws of single-gimbal control moment gyros[J].Journal of Guidance Control and Dynamics,2007,30(5):1331-1441.
[5]PARADISO J.Global steering of single gimbal control moment gyroscopes using a directed search[J].Journal of Guidance Control and Dynamics,1992,15(5):1236-1244.
[6]VADALI S R,OH H S,WALKER S R.Preferred gimbal angles for single gimbal control moment gyros[J].Journal of Guidance Control and Dynamics,1990,13 (6):1090-1095.
[7]OH H S,VADALI S R.Feedback control and steering laws for spacecraft using single gimbal control moment gyros[C].Guidance,Navigation and Control Conference,1989.
[8]PARADISO J.Global steering of single gimballed control moment gyroscopes using a directed search[J].Journal of Guidance Control and Dynamics,1992,15 (5):1236-1244.
[9]WIE B.Singularity escape/avoidance steering logic for control moment gyro systems[J].Journal of Guidance Control and Dynamics,2005,28(5):948-956.
[10]WIE B.Singularity robust steering logic for redundant Single-gimbal control moment gyros[J].Journal of Guidance Control and Dynamics,2001,24(5):865-872.
[11]李力文,周军,黄河,等.附加框架角速度的SGCMG操纵律设计[J].宇航学报,2014,35(1):69-75.LI L W,ZHOU J,HUANG H,et al.Steering Law Design for SGCMG System Based on Appending Gimbal Rates[J].Journal of Astronautics,2014,35(1):69-75.
SGCMG Singularity Avoidance Method Based on Command Torque Vector Helix Search
SUN Yujia1,YUAN Li1,2,LEI Yongjun1,2
(1.Beijing Institute of Control Engineering,Beijing 100190,China; 2.Science and Technology on Space Intelligent Control Laboratory,Beijing 100190,China)
In order to overcome the problem of gimbal lock,where the command torque is coincident with a particular direction and cannot escape from it,An effective approach is proposed to avoid the singular state of the control moment gyros in this paper.Based on the algorithm of the SR(singular robust)avoidance and the null motion singularity avoidance,this approach introduces a rotation angle adjusted associating with the singularity measurement and a rotation axis continuously changed with time,which prevents the system from entering the singularity or escaping from the singular point rapidly by searching,to avoid the occurrence of control moment gyros gimbal configuration lock.Simulation results show that this method has a good characteristic of singularity avoidance,and can overcome the gimbal lock.
singularity avoidance;gimbal lock;helix search; single gimbal control moment gyros
V448.22
A
1674-1579(2016)06-0026-05
10.3969/j.issn.1674-1579.2016.06.005
孙羽佳(1991—),女,硕士研究生,研究方向为航天器姿态控制;袁利(1974—),男,研究员,研究方向为航天器控制及系统设计;雷拥军(1971—),男,研究员,研究方向为航天器动力学与控制.
*国家自然科学基金资助项目(61304037).
2016-10-09
猜你喜欢
上海文化(文化研究)(2022年3期)2022-06-28
军事运筹与系统工程(2020年2期)2020-11-16
北京航空航天大学学报(2019年9期)2019-10-26
五邑大学学报(自然科学版)(2019年3期)2019-09-06
江西教育B(2019年2期)2019-04-12
中国诗歌(2018年6期)2018-11-14
载人航天(2016年4期)2016-12-01
读者·校园版(2016年19期)2016-09-21
科教导刊·电子版(2016年16期)2016-07-18
科技视界(2016年6期)2016-07-12