单轴并联混合动力客车再生制动策略解析
2016-11-22 11:29胡宇辉唐高强席军强翟涌
北京理工大学学报 2016年5期
胡宇辉, 唐高强, 席军强, 翟涌
(北京理工大学 机械与车辆学院, 车辆传动重点实验室,北京 100081)
单轴并联混合动力客车再生制动策略解析
胡宇辉, 唐高强, 席军强, 翟涌
(北京理工大学 机械与车辆学院, 车辆传动重点实验室,北京 100081)
以某先进的单轴并联混合动力系统为研究对象,提出一种再生制动策略逆向解析的方法. 根据摸底试验分析和再生制动参数预设设计试验解析流程,进行实车试验,分析了各参数对再生制动的影响. 分析表明车速决定制动过程中是否存在再生制动,电机转速、挡位决定再生制动的过程,电池温度和挡位决定再生制动过程中电机转矩和功率的大小. 通过不同手柄模式、不同制动强度及不同路况下的再生制动测试,解析出了各手柄模式的再生制动策略. 最后通过仿真分析验证解析策略的正确性.
混合动力汽车;实车测试;再生制动参数;再生制动控制策略
再生制动控制策略是混合动力汽车的关键技术之一,国内外混合动力客车再生制动策略的正向研究较多,在理论上提出了许多先进的控制策略. Ahn等[1]通过改进传统ABS,EBS等制动系统实现再生制动,该方案对整车原有制动系统稳定性影响较大;尧文亮等[2]提出前后轮采用理想制动力分配,制动力分配后,再对驱动轮的再生制动和摩擦制动进行二次分配;舒红等[3]提出采用瞬时优化和全局优化的策略控制再生制动;Hancock[4]提出通过设置滑移率经验阈值,适时关闭再生制动. 然而,上述研究大都依赖于高性能的电子制动力分配系统,处于理论分析及方案设计阶段,道路试验研究较少. 为了提升中国自主设计混合动力再生制动控制策略的能力,文中展开了对国外某先进的单轴并联混合动力系统再生制动策略的逆向解析研究.
1 单轴并联混合动力系统介绍
文中选取的单轴并联混合动力系统已被证明具有良好的节能减排作用,其各总成布置情况如图1所示,锰酸锂离子电池的额定电压为360 V,容量为8 A·h;永磁同步电机的额定功率26 kW,峰值功率44 kW;变速器的速比为7.05/4.13/2.52/1.59/1.00/0.78/R6.75. 该试验车可以选择3种手柄模式:手动模式、经济型模式(D模式)和动力模式(LOW模式),其中手动模式在非制动过程中为手动换挡,在制动过程中为自动降挡.
2 再生制动试验方案的确定
再生制动过程中牵涉到电池、电机、变速器以及制动器,再生制动策略的设计必须考虑电机特性、电池特性和需求制动转矩的影响,因此电机转速nm、电池SOC(state of charge)以及挡位都可能是影响再生制动的参数[3,5-8];考虑到行车安全性,制动强度和滑移率可能是影响再生制动的参数[4].
在试验中,电池温度和SOC、制动强度难以控制在某个特定的值. 通过上位机向CAN总线发送期望的电池温度,整车控制器接受到的电池温度为上位机发送的期望值,这种方法称作电池温度欺骗,通过电池实际温度T0及SOC欺骗将电池温度T1和SOC控制在某一期望的值. 图2为电池温度欺骗试验. 图中Sb为制动开关,Tm为电机转矩,Pm为电机功率. 在使用电池SOC欺骗时必须时刻观测实际电池SOC,防止电池过充. 通过在制动踏板上安装踏板力传感器,通过控制踏板力大小大致控制制动强度.
通过对车辆进行摸底测试,滑移率对再生制动无影响,而车速v、挡位、电机转速、电池SOC和制动强度对再生制动可能存在影响. 根据上述假设的参数及对摸底试验的分析制定试验方案,将不同的手柄模式和制动强度(滑行、轻度、中度和紧急制动)组成12个试验科目,将电池SOC和车速组合形成了每个科目内的试验. 为减少试验数量,应在每一个科目内的试验全部做完后进行分析,根据分析的结论调整试验方案.
3 再生制动参数试验解析
具体试验解析流程如图3所示.
为了便于分析,将再生制动分为3个方面进行分析:影响再生制动存在性的参数分析;影响再生制动过程变化的参数分析;影响再生制动过程中电机转矩和功率大小的参数分析. 并按上述3方面依次进行分析,各方面内按参数分析的难易程度和影响程度有先后次序地进行分析.
3.1 再生制动存在性分析
3.1.1 车速分析
通过对试验数据分析可知,当车辆挡位为1挡(LOW模式),车速大于6 km/h时均存在再生制动,小于6 km/h时不存在再生制动;当挡位大于1挡,起始车速小于13 km/h时不存在再生制动;大于13 km/h时存在再生制动. 在典型城市工况所有消耗的制动能量中,车速低于13 km/h的范围内仅消耗7%的总制动能量,同时电动机运行在低速导致电动机处于低电动势,致使车辆在低速下难以回收能量[5]. 在确定车速只对再生制动存在性有影响后便可修改试验方案增加起始车速间隔以减少试验数量.
3.1.2 制动强度和电池SOC分析
当车速大于13 km/h时,对不同的制动强度进行摸底试验,分析可知当制动踏板位移达到极限时依然存在再生制动,因此可以推断制动强度和滑移率不是决定再生制动是否存在的影响参数. 对不同的电池SOC进行试验,分析可知电池SOC从14%(最低值)~100%均存在再生制动,如图4所示,当电池SOC为96%时仍存在再生制动.
通过上述分析可知,决定是否存在再生制动的参数只有车速.
3.2 再生制动过程性分析3.2.1 电机转速分析
根据电机特性可知,电机存在两个明显不同的区域:恒功率区域和恒转矩区域. 通过试验可知车辆先以恒电机功率进行再生制动,恒电机功率结束后,紧接着以恒电机转矩进行再生制动,通过统计可知,大部分试验的恒功率区域与恒转矩区域切换时的电机转速均在1 000 r/min左右(1 000 r/min为电机基速),偏差不超过50 r/min,如图5~6所示. 图中dc为离合器位移百分比. 因此可以推断电机转速对再生制动过程有影响.
3.2.2 挡位分析
部分试验的恒功率区域和恒转矩区域切换时的电机转速不在1 000 r/min左右,甚至有些试验不存在恒电机功率区,而这些试验集中在滑行制动中的1、2和3挡. 这是因为在滑行试验中,挡位对电机转矩存在阈值关系. 滑行时1、2、3挡的再生制动电机阈值分别为106.5,181.8和297.9 N·m,三者之比恰为3个挡位的传动比之比,而4~6挡滑行时均可以达到电机的最大转矩,这是为了避免在滑行过程中车辆减速度超过驾驶员的预期. 在一些试验中,挡位决定的电机阈值使得电机功率还没达到最大或电机转速还未降至1 000 r/min时电机转矩已经达到了最大,此后以恒电机转矩进行再生制动. 因此可以断定挡位对再生制动过程和强弱存在影响.
3.2.3 手柄模式分析
对手动模式、LOW模式、D模式的试验进行分析,由于各手柄模式在制动过程中的换挡规律不同,使得各模式下的再生制动过程存在差异,D模式在制动过程中不换挡,手动模式在电机转速为650 r/min时进行降挡,LOW模式制动过程中降挡时的电机转速大于1 000 r/min. 手动模式在电机转速大于1 000 r/min时以恒功率进行再生制动,转速小于1 000 r/min时以恒转矩进行再生制动,如图7~8所示; LOW模式降挡的电机转速大于1 000 r/min,故整个过程均以恒电机功率进行再生制动,如图6所示,Gd为目标挡位;D模式在制动过程中不降挡,当电机转速降为470 r/min左右时结束恒电机转矩区,此后电机功率和转矩不断降低,如图5所示. 因此,手柄模式对再生制动的过程有影响.
通过上述分析,电机转速是再生制动过程最主要的影响参数,挡位和手柄模式都是通过影响电机转速实现对再生制动过程的影响.
3.3 再生制动强弱性分析
在再生制动充电过程中电机转矩与功率均为负值,为便于比较和叙述,文中中所提到的电机转矩和功率均不带负号,但均表示为负值.
3.3.1 电池温度分析
电池温度对再生制动强弱性的影响是在室外温度大幅度升高后才得以发现. 通过分析不同季节的实车试验,肯定了电池温度对再生制动的影响. 因此修改先前制定的试验方案,加入电池温度作为控制参数,利用电池温度欺骗进行不同电池温度的试验.
对比不同电池温度的试验可知,随着电池温度升高至一定值,再生制动过程中电机功率和转矩不断减小,如图7~8所示. 两组试验的其他条件均相同,只有电池温度不同,两组试验再生制动过程中的电机功率和转矩大小相差很大. 图7中电池温度为47 ℃,电机最大功率和转矩分别为34 kW和319.2 N·m,图8中电池温度为38 ℃,电机最大功率和转矩分别为42 kW和420 N·m. 通过对比图2与图7、图8可知,试验结果(再生制动过程中的电机转矩和功率的大小)与欺骗电池温度而非实际电池温度所对应的结果相同,表明采用参数欺骗方法的可行性. 通过对所有试验分析可知,对于每一个特定的电池温度,再生制动过程中存在最大的电机功率和转矩,如图9所示,图中实心为电机转矩,空心为电机功率. 在该电池温度下进行再生制动,电机功率和电机转矩不大于对应的最大值. 因此,电池温度是再生制动强弱的影响因素.
3.3.2 电池SOC和制动强度分析
通过分析电池SOC和制动强度对再生制动过程中电机转矩和功率大小无影响. 考虑到电池SOC对电池能量回收效率影响不大[9],并且当电池SOC大于62%时,电机参与车辆驱动,使得电池维持高SOC的时间很短,因此制动能量回收可以不考虑电池SOC的影响. 在确定电池SOC和制动强度对再生制动无影响后便可减少两个参数的相关试验.
因此,再生制动过程中电池温度和挡位对电机转矩和功率存在影响,当两个因素同时起作用时,通过实验可知,电机转矩和功率的最大值取两个因素决定的最小值. 再生制动过程中电机转矩计算公式为
Tm=min(99549Pmax/nm,Tmax),
式中:Pmax、Tmax为当前条件下再生制动电机的最大功率和最大转矩.
通过试验分析可知整车控制器的控制流程为首先通过制动时的车速确定车辆是否应该进入再生制动,如果进入再生制动,再通过电池温度和挡位确定再生制动过程中恒转矩区的电机转矩和恒功率区的电机功率的大小,进而结合电机转矩特性和手柄模式所决定的换挡规律确定再生制动的过程.
4 再生制动控制策略试验解析
正向设计混合动力客车换挡规律时,可能采用先进的控制理论和算法对再生制动进行控制. 在理论上常用的方法有制动力分配控制策略[2]、模糊控制策略[10]、优先考虑再生制动控制策略[5]等. 采用这些方法的目的都是为了让车辆合理地回收制动过程中的能量.
经过4 500 km的实车测试,同时对不同的道路条件(城市、高速、山区路况)进行测试. 得出再生制动过程中电机转矩和功率与制动强度没有必然联系,表明系统未采用制动力分配控制策略;再生制动的存在性、过程性和强弱性中的控制量均存在明确的边界值,表明系统未采用模糊控制和其他智能控制方法;除在滑行时考虑到驾驶员期望的车辆减速度和考虑电池温度外,车辆尽可能地采用电机所能达到的最大功率进行能量回收,因此系统采用了在满足驾驶员需求的前提下优先考虑再生制动的控制策略.
5 再生制动策略解析
由于制动过程中降挡策略的不同,不同手柄模式的再生制动控制策略存在一定的差异. 上文已确定再生制动的影响参数和控制流程,综合上述结论可得到该系统采用的再生制动控制策略. LOW模式和D模式分别可概括成图10和图11所示的控制策略.
6 再生制动策略分析
6.1 不同手柄模式再生制动策略分析
由于制动过程中降挡策略的差别,D模式、LOW模式和手动模式下的再生制动过程存在差异. 表1为不同模式下4挡、起始车速为35 km/h、电池SOC为20%、电池温度为30 ℃时不同制动强度下再生制动能量回收情况. 由于换挡过程中再生制动能量的损失以及降挡过程中电机调速消耗的电池能量,使LOW模式和手动模式回收的能量少于D模式,并且随着制动强度的增加,换挡时间占总制动时间的比例增大,LOW模式与D模式回收能量之间的差距越大.
上述分析表明,制动过程中采取不降挡的方式更有利于回收能量. 但降挡有利于减少制动器工作强度,特别是在山区多长下坡的工况下能够更好地避免制动器因过热而失效,同时车辆在制动结束后可直接在低挡进行加速,利于车辆动力性,而D模式则需要降至合适挡位后再进行加速,不利于车辆动力性. 因此可以根据不同工况选择不同的手柄模式,对于有较大坡度的城市或山区道路,制动过程中应选择降挡的策略,保证机械制动的有效性和车辆动力性;对于平坦的城市工况,制动过程中应选择不降挡的策略,回收更多的制动能量.
表1 不同手柄模式再生制动能量回收对比
Tab.1 Comparisons of energy recovery among different handles
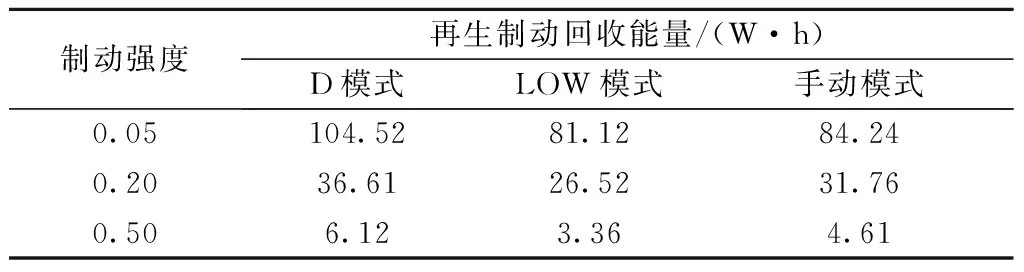
制动强度再生制动回收能量/(W·h)D模式LOW模式手动模式0.05104.5281.1284.240.2036.6126.5231.760.506.123.364.61
6.2 再生制动策略仿真分析
在解析出包括再生制动策略的整车能量管理策略及完成零部件特性试验后,基于Cruise和Matlab搭建了单轴并联混合动力客车联合仿真平台,仿真结果表明车辆动力性和经济性与实车试验结果的偏差分别小于5%和10%,验证了解析策略的正确性.
图12为中国典型城市工况下(D模式)发动机转速ne、电机转速、发动机转矩百分比Te、电机转矩和电池SOC随时间的变化的仿真结果,仿真结果反应了各部件运行过程中的动态特性. 减速过程中电机均存在再生制动,整个循环过程中电池SOC在不断的变化(54%~82%),并且加速过程中随着车速和SOC的变化在纯电动驱动、纯发动机驱动和混合驱动之间不断切换,各驱动模式之间的合理切换保证了电池SOC的平衡.
7 结 论
文中解决了电池温度、电池SOC和制动强度的控制问题. 提出了一种逆向研究混合动力系统再生制动策略的试验方法和分析方法:通过理论分析和摸底试验初步确定再生制动影响参数,从而制定试验方案,并采用边试验边分析边修改试验方案的方法提高了试验质量并减少了试验数量;将再生制动分为存在性、过程性和强弱性进行分析获得了各方面的影响参数,在此基础上得出其控制流程,简化了分析的过程,降低了分析的难度;通过排除法得出了再生制动控制策略. 实车测试证明该方法的可行性,解析出了系统的再生制动策略. 该方法适用于其他系统再生制动策略的解析.
解析结果表明该系统采用了在满足驾驶员需求的前提下优先考虑再生制动的控制策略,车速决定车辆是否存在再生制动,电机转速、挡位和手柄模式决定再生制动的过程,电池温度和挡位决定再生制动过程中电机转矩和功率的大小. 不同手柄模式之间的再生制动存在差异,动力型模式在制动过程中进行降挡,利于制动安全性和动力性;经济型模式在制动过程中不降挡,利于再生制动能量回收.
[1] Ahn J K, Jung K H, Kim D H, et al. Analysis of a regenerative braking system for hybrid electric vehicles using an electro-mechanical brake[J]. International Journal of Automotive Technology, 2009,10(2):229-234.
[2] 尧文亮,周云山.混联式混合动力再生制动控制策略[J].科学导报,2010,28(8):89-93.
Yao Wenliang, Zhou Yunshan. A control strategy for braking energy distribution and regenerative braking in an SP-HEV[J]. Science & Technology Review, 2010,28(8):89-93.(in Chinese)
[3] 舒红,袁景敏,胡明辉,等.中度混合动力汽车匀速下坡再生制动策略优化[J].重庆大学学报,2008,31(9):965-970.
Shu Hong, Yuan Jingmin, Hu Minghui, et al. Optimized regenerative braking strategy for a medium hybrid electric vehicle cruising downhill[J]. Journal of Chongqing University, 2008,31(9):965-970. (in Chinese)
[4] Hancock M. Impact of regenerative braking on vehicle stability[C]∥Procedings of Hybrid Vehicle Conference, IET The Institution of Engineering and Technology. Coventry, UK:[s.n], 2006:173-184.
[5] Mehrdad E, Yinin G, AliE. Modern electric, hybrid electric, and fuel cell vehicles, fundamentals theory, and design second edition[M]. America: CRC Press,2010.
[6] 丰田自动车株式会社.二次电池控制装置及控制方法:中国:CN200480032289.X[P].2006-12-06.
Toyota Motor Corporation. Secondary battery control device and control method: China, CN200480032289.X[P].2006-12-06. (in Chinese)
[7] 杨阳.CVT混合动力系统再生制动综合控制研究[D].重庆:重庆大学,2008.
Yang Yang. Integrate control of regenerative braking for hybrid electrical system with CVT[D]. Chongqing: Chongqing University, 2008.
[8] Eaton Corporation. Regeneration and brake management system: European Patent, 05812031.2[P]. 2005-11-16.
[9] 邓涛,孙冬野,秦大同,等.CVT混合动力汽车再生制动系统仿真[J].机械工程学报,2009,45(9):215-220.
Deng Tao, Sun Dongye, Qin Datong, et al. Regenerative braking simulation for Hybrid electric vehicle with CVT[J]. Journal of Mechanical Engineering, 2009,45(9):215-220. (in Chinese)
[10] Xu G, Li W, Xu K, et al. An intelligent regenerative braking strategy for electric vehicles[J]. Energies, 2011,4(9):1461-1477.
(责任编辑:孙竹凤)
Analysis of Regenerative Braking Strategy on a Single-Shaft Parallel Hybrid Electric Bus
HU Yu-hui, TANG Gao-qiang, XI Jun-qiang, ZHAI Yong
(School of Mechanical Engineering,Science and Technology on Vehicle Transmission Laboratory,Beijing Institute of Technology, Beijing 100081, China)
Taking an advanced single-shaft parallel hybrid electric bus as study objective, a reverse analytical method for regenerative braking strategy was proposed. First the test procedure was designed based on the preliminary test and the preset regenerative braking strategy parameters. Then a real vehicle test was conducted to analyze the effects of parameters. Analysis results show that vehicle speed determines whether the regenerative braking exists during the braking process; while motor speed and gear determine the process of regenerative braking, battery temperature and gear determine the quantity of motor torque and power. Testing with different handle modes, braking severity and road conditions, the regenerative braking strategies of different handles have been worked out. Finally, the correctness of the analytic strategy was validated with simulation.
HEV;real vehicle test;regenerative braking parameters;regenerative braking strategy
2014-06-26
国家“八六三”计划项目(2011AA11A252)
胡宇辉(1980—),男,博士,讲师,E-mail:gghh2004@bit.edu.cn.
U 467.11
A
1001-0645(2016)05-0480-07
10.15918/j.tbit1001-0645.2016.05.008
猜你喜欢
防爆电机(2022年2期)2022-04-26
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
中国航海(2019年2期)2019-07-24
电机与控制学报(2018年9期)2018-05-14
汽车维修技师(2017年6期)2017-11-18
中学生数理化·八年级物理人教版(2016年5期)2016-08-26
中学生数理化·八年级物理人教版(2016年5期)2016-08-26
新高考·高一物理(2015年3期)2015-08-20
试题与研究·中考物理(2014年3期)2015-05-11