
基于MCP8025的无位置传感器无刷直流电机控制系统设计
2016-12-20 05:18吴耀春韩向可
微特电机 2016年9期
吴耀春,韩向可
(安阳工学院,安阳 455000)
基于MCP8025的无位置传感器无刷直流电机控制系统设计
吴耀春,韩向可
(安阳工学院,安阳 455000)
介绍了一种基于MCP8025的无位置传感器无刷直流电机控制系统的设计。系统采用升频升压的方式实现电机起动后,利用MCP8025内部的检测模块较容易地实现了反电动势过零检测。从控制系统的硬件和软件设计方案及控制策略两个方面详细介绍了控制系统的实现方法,试验结果验证了该控制方案的可行性。
无刷直流电机;无位置传感器;控制系统;MCP8025
0 引 言
近年来随着电子技术和新型永磁材料的发展,用电子换相代替电刷机械换向的永磁无刷直流电动机具有体积小、结构简单、运行可靠、维护方便、启动性能好、调速快而无机械换相等特点,广泛应用于工业、电动车辆驱动、医疗机械等领域。传统的有位置传感器无刷直流电动机由于传感器难以安装,限制了电机的小型化,增加了电机的成本,影响电机的寿命,导致电机稳定性、可靠性下降。因此,实现无位置传感器的无刷直流电机的控制具有重要意义。目前应用较为普遍的是采用反电动势法的基于DSP专用集成电路的控制方案。
本文介绍一种基于MCP8025专用驱动芯片和AVR单片机为核心的无位置传感器无刷直流电机的控制系统。该系统结构简单、控制方便。
1 反电动势过零检测原理分析
电机绕组的中性点一般未引出,因此各相绕组反电动势大小的直接测定比较困难,而比较方便的是三相端子对地电压的测量。本文使用的无刷直流电机采用Y形三相桥式联接,120°两两导通的方式,具有梯形反电动势,其等效电路原理如图1所示。
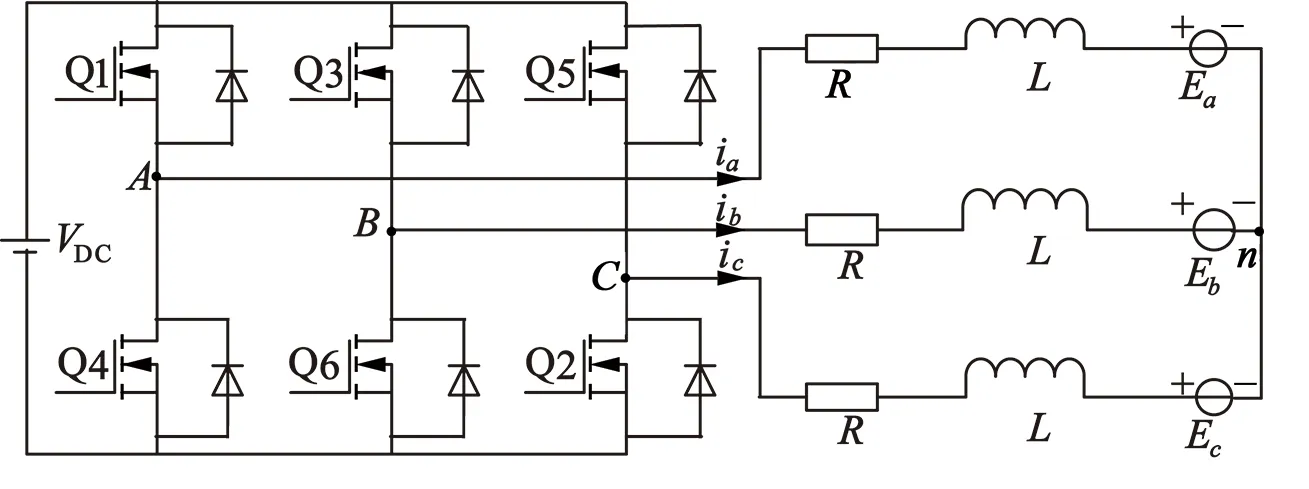
图1 三相全桥式BLCDM主电路原理图
在允许的范围内,忽略齿槽效应、涡流和磁滞损耗、永磁体的阻尼作用、磁路饱和,绕组均匀分布于光滑定子内表面,转子上没有阻尼绕组。则定子三相绕组的端电压方程可表示:
式中:un为中点电压。
由于采用的两两导通方式,所以无刷直流电机在每一个瞬间只有两相绕组导通,不导通相绕组电流为零,另外导通两相绕组的电流大小相等、方向相反,所以三相绕组的电流总和为零。三相反电势互差120°电角度,所以三相绕组反电势之和等于零。由式(1)可得:
电机运行中,在任意时刻(换相瞬间除外),假设A相悬空,则有ia=0,则A相的端电压方程:
可以看出,在A相悬空期间,其反电动Ea为端电压ua与中点电压un的差,将A相的端电压与中性点电压信号作差值比较就可以得到A相反电动势过零点信息,同样B、C两相的反电动势过零点也可以同样得到。基于这个原理,本文设计了基于MCP8025的无位置传感器的无刷直流电机控制系统。
2 系统硬件结构和工作原理
系统的硬件电路由MCP8025驱动模块、逆变桥模块、电流检测模块、ATmega128控制模块组成,具体结构如图2所示。控制系统的工作过程:主控模块ATmega128收到速度调节信号和由MCP8025发送的电机反电动势位置判断信号后,将相应的PWM信号送给MCP8025驱动模块,由其进行控制逆变桥电路模块中的3组MOSFET的上、下臂的导通方式而驱动电机,同时控制模块通过计算电机的运行速度、检测相电流来形成闭环控制,进而调整PWM信号,最终实现控制结果。
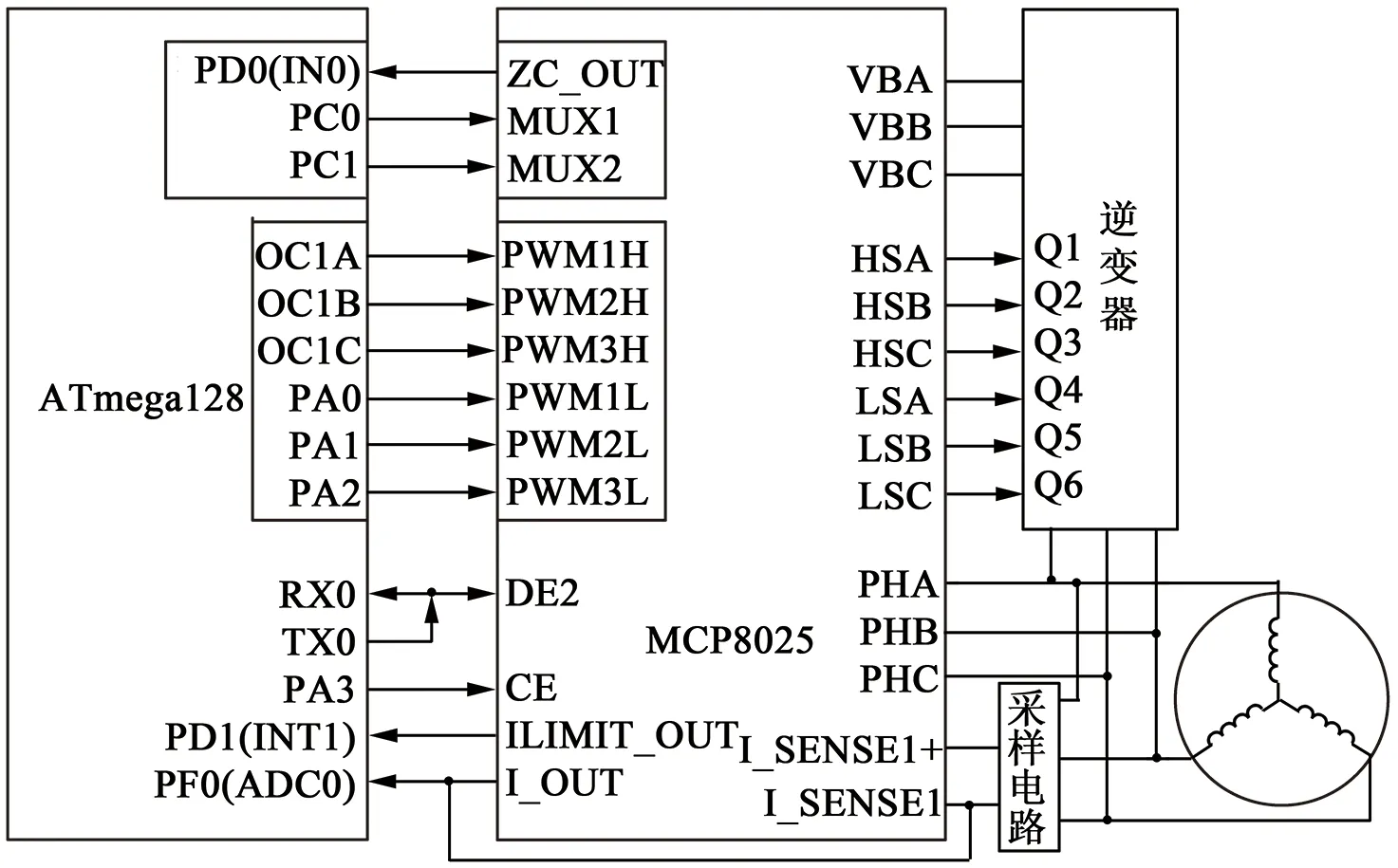
图2 硬件结构图
2.1 基于MCP8025的反电动势过零点检测
MCP8025内部集成的反电动势检测模块包括一个反电动势采样器、相端电压选择器和一个中点模拟器。控制模块通过DE2半双工通信接口配置寄存器SET_CFG_0(为00010000)打开内部中点模拟器,这时反电动势采样器就不断的采集A,B,C三相的端电压,并按照公式(2)计算电机的中点电压 。如果想判断某一相的端电压是否过零,我们只需要通过相端电压的选择按钮MUX1、MUX2将相应的相选定(00:A相,01:B相,10:C相),反电动势采样器就会把该相端电压采集并与un比较,如果相等ZC_OUT就有电平输出。因此,只需要监测MCP8025驱动模块的ZC_OUT引脚的电平变化,再通过相端电压选择器的按钮MUX1、MUX2的控制,就可以检测到电机各相反电动势过零点。这种方案充分利用芯片MCP8025内部含有的反电动势检测功能模块,简化了无位置传感器无刷直流电机控制系统的硬件电路和控制策略。
2.2 换相方法
主控制模块根据引脚ZC_OUT输出的位置信号,通过MCP8025对逆变器的Q1~Q6进行控制,使各相绕组按照一定的规律通电形成旋转磁场,带动转子磁钢进行转动。电机的各相产生的理想反电动势波形如图3所示。
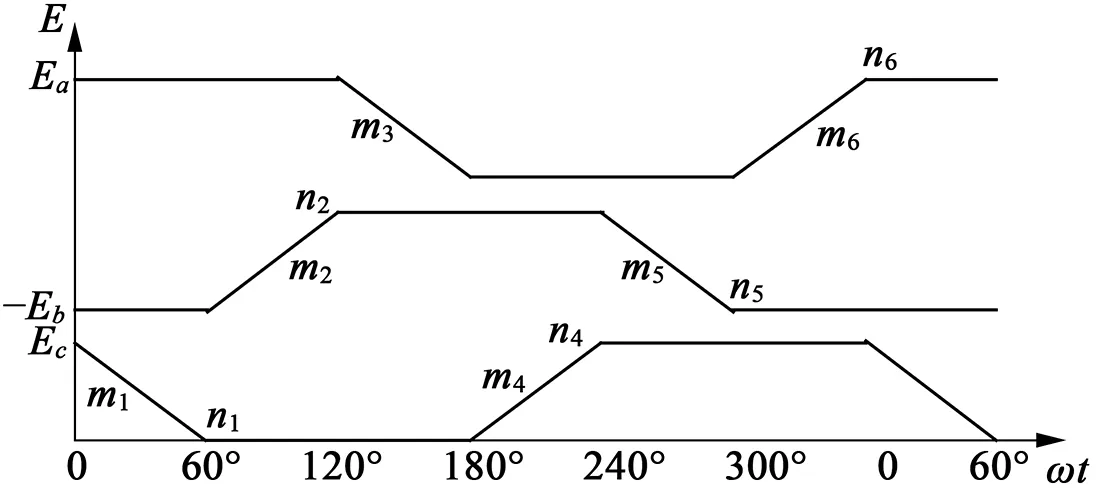
图3 反电动势波形图
为了保证最大的电枢电流来获得最大的平均转矩,各相反电动过零点延迟30°电角度即为换相点。本系统采用下臂Q2,Q4,Q6直通,上臂Q1,Q3,Q5控制的方式,MOSFET导通顺序如表1所示。
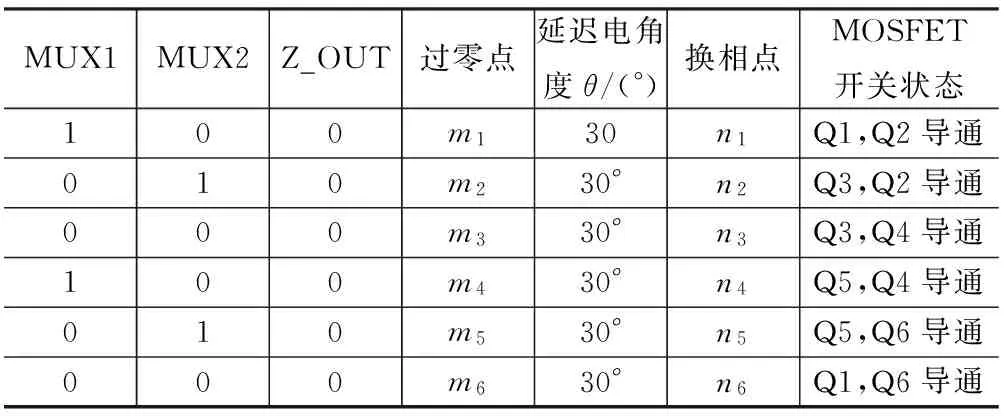
表1 MOSFET导通顺序表
2.3 电流检测

3 控制策略
3.1 启动
无位置传感器无刷直流电机的反电动势大小与电机的转速成正比。所以,电机静止时电动势为零,电机无法自启动。本文采用升频升压的同步起动方法,由控制器产生的PWM波形经过MCP8025驱动芯片控制逆变器,使逆变器的换相频率慢慢增大,而且给无刷直流电机的定子电压开始较小,逐步升高,从而使电机的转速逐步增大,等电机定子上的电压足够大时,即电机转子已经达到一定的转速,能使MCP8025的反电动检测模块正常工作,此时就可以将电机切换到反电动势检测控制的正常闭环运行状态。
3.2 反电动势检测控制
在本系统中,某相的过零点就是ZC_OUT引脚输出电平的变化,上升沿和下降沿对应BLCD各相反电动势的过零时刻,这样每次有反电动势过零点时,即产生中断。无刷直流电机每隔为60°电角度反电动势过零点一次,而绕组的换相时刻在过零点后延30°的电角度。因此绕组的换向时间点为每次进入中断后,再顺延上次中断时间间隔的1/2。具体控制流程如图4所示。
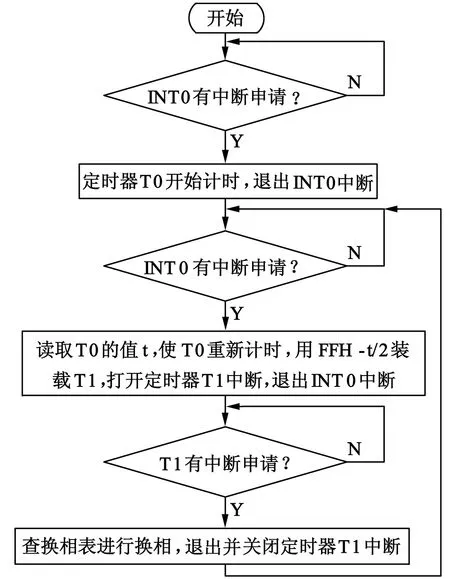
图4 反电动势检测换相流程图
在电机完成起动后,当ZC_OUT引脚的第1个边沿脉冲进入INT0时,打开定时器T0进行计时,并退出中断。当ZC_OUT引脚的第2个边沿脉冲进入INT0时,读取T0的值t,再使T0重新计时,并用FFH-t/2装载T1,T1开始计时,退出T0中断。当T1产生中断时,即为换相时刻,再根据MUX1、MUX2当前状态组合值,查找换相表进行换相。重复上述步骤,使无位置传感器无刷直流电机正常运行。
4 试验结果
实验中选用电机的额定电压24 V,输出功率125 W,额定转速3 000 r/min,相数3相。无位置传感器无刷直流电机的三相端电压波形,如图5所示。实验结果表明该系统控制的无位置传感器无刷直流电机能够正常顺利起动,换相正确,运行稳定。
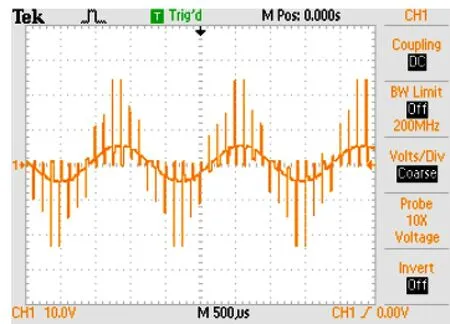
图5 端电压波形(截图)
5 结 语
本文给出了基于MCP8025的无位置传感器无刷直流电机控制系统的软件与硬件设计方案和控制策略,可以看出本设计方案让无位置传感器无刷直流电机的反电动势过零点的判断更容易实现。试验证明,采用该控制方案电机启动平稳,运行状态良好,具有实用价值。
[1] 刘勇.基于DSP的无位置传感器无刷直流电机控制系统[J].微特电机,2004,32(1):40-42.
[2] 胡发焕,任志斌,潘春荣.基于单片机的无位置传感器无刷直流电机控制[J].电机控制与应用,2014,41(6):19-20.
[3] SHAO Jianwen.Further Improvement of direct back EMF detection for sensorless brushless DC(BLDC) motor drives[C]//20th Annual IEEE Applied Power Electronics Conference and Exposittion,APEC,2005:933-936.
[4] 曹建波,曹秉刚,王斌,等.电动车用无刷直流电机无位置传感器控制研究[J].西安交通大学学报,2008,42(5):597-599.
[5] 颜冰钧,郭新华,李岩,等.基于脉冲计数的无位置BLCDM转子位置精确检测方法[J].微电机,2014,47(3):82-85.
[6] 周顺荣,王敏.采用反电势逻辑换向方法的无刷直流电动机[J].微特电机,2003,31(6):22-24.
[7] 曹杰,史金飞,戴敏.基于MEGA8单片机的无传感器无刷直流电机控制系统设计[J].自动化仪表,2005,26(12):13-16.
Control System of Sensorless Brushless DC Motor Based on MCP8025
WUYao-chun,HANXiang-ke
(Anyang Institute of Technology,Anyang 455000,China)
A control system for sensorless brushless DC motor (BLCDM) based on MCP8025 was presented.The system was developed with increasing frequency and increasing voltage synchronous starting method, and using the detection function of MCP8025 to make easier the realization of bemf zero crossingpoint detection.The hardware structure and software design of sensorless BLCDM control system was described in details.The result of experiment verified the feasibility of the control strategy.
brushless DC motor; sensorless; control system; MCP8025
2015-09-07
TM33
A
1004-7018(2016)09-0083-03
猜你喜欢
大电机技术(2022年5期)2022-11-17
微电机(2022年8期)2022-10-12
汽车实用技术(2022年12期)2022-07-05
微特电机(2021年11期)2021-11-16
郑州大学学报(工学版)(2020年2期)2020-06-16
环球市场(2020年32期)2020-01-19
微电机(2019年3期)2019-04-28
汽车电器(2019年2期)2019-03-22
电子制作(2017年1期)2017-05-17
电源技术(2016年12期)2017-01-10
