绝缘子清洁机械臂的设计与仿真
2017-12-13 03:22姜红敏吴文江
承德石油高等专科学校学报 2017年5期
姜红敏,吴文江
(石家庄铁道大学 机械工程学院,河北 石家庄 050043)
绝缘子清洁机械臂的设计与仿真
姜红敏,吴文江
(石家庄铁道大学 机械工程学院,河北 石家庄 050043)
针对当前铁路线路上绝缘子清洁难以做到自动化的问题,设计了适用于瓷瓶绝缘子清洁的机械臂,阐述了机械臂的特点和实现瓷瓶绝缘子清洁的工作过程。利用SolidWorks软件的绘图及设计功能,对机械的各个零件进行三维建模、装配并用ADAMS/VIEW软件对机械臂的运动进行仿真,获得机械臂中的水平臂末端法兰沿着X、Y、Z方向的运动轨迹,为机械臂的进一步优化设计提供了一定依据。
绝缘子;清洁;机械臂;建模;仿真
从上个世纪五十年代末机械臂问世后,经过多年发展,逐渐成为了机械制造生产过程中必不可少的自动化设备[1],在安全性差的环境中应用越发频繁,在电网建设过程中也发挥重要作用。随着工业化进程的进一步加快,化工企业比较多的地区,空气污染较为严重,当地的绝缘子极易被污垢堆积,造成污闪事故[2],进而导致大面积停电。因此,定期对绝缘子进行清扫,恢复绝缘子原有的绝缘水平是防止污闪事故发生的有效手段。通过对河北地区的普通铁路段绝缘子工作环境观察,设计了一种新型的能够全面清洁绝缘子的机械臂。
1 绝缘子清洁机械臂的特点及运动方案
1.1机械臂的特点
当前普通铁路段上绝缘子的清洁主要为手工清洗、高压水枪冲洗、机械臂清洁配合使用清洁液等方法。这些方法或是人工参与下完成,劳动强度大,清洁效果差,可靠性差,或是利用清洁液对环境造成污染。本研究的机械臂优点为:工作效率高,节省大量劳动力;机构简单,动作灵活,可靠性强;操作简单,方便。
1.2机械臂的传动和运动方案
一般机械臂的传动主要方式为:齿轮传动、连杆传动等,其中,齿轮传动相对较为平稳,工作可靠,传动精确,传动效率高,但是对加工制作、安装提出了相对较高的要求;连杆传动可实现大力矩传动,生产加工、制作比较简单,成本低,控制简单。机械臂的驱动方式主要可分为:液压式传动、气动式传动等[3]。液压传动具有传动平稳,传动功率大,低速和自锁过载保护以及布置位置较为灵活的特点[4];气动式传动方式主要是靠气体的抗挤压来实现力的传动,但是效率的传递和液压相比较而言较低。
为了满足绝缘子机械水平臂的设计的需要,根据对上述各种传动方式和驱动方式的分析,最终选择传动方式为连杆传动,驱动方式为液压式,此种方式简单,实用可靠,经济。
2 绝缘子机械水平臂运动学分析
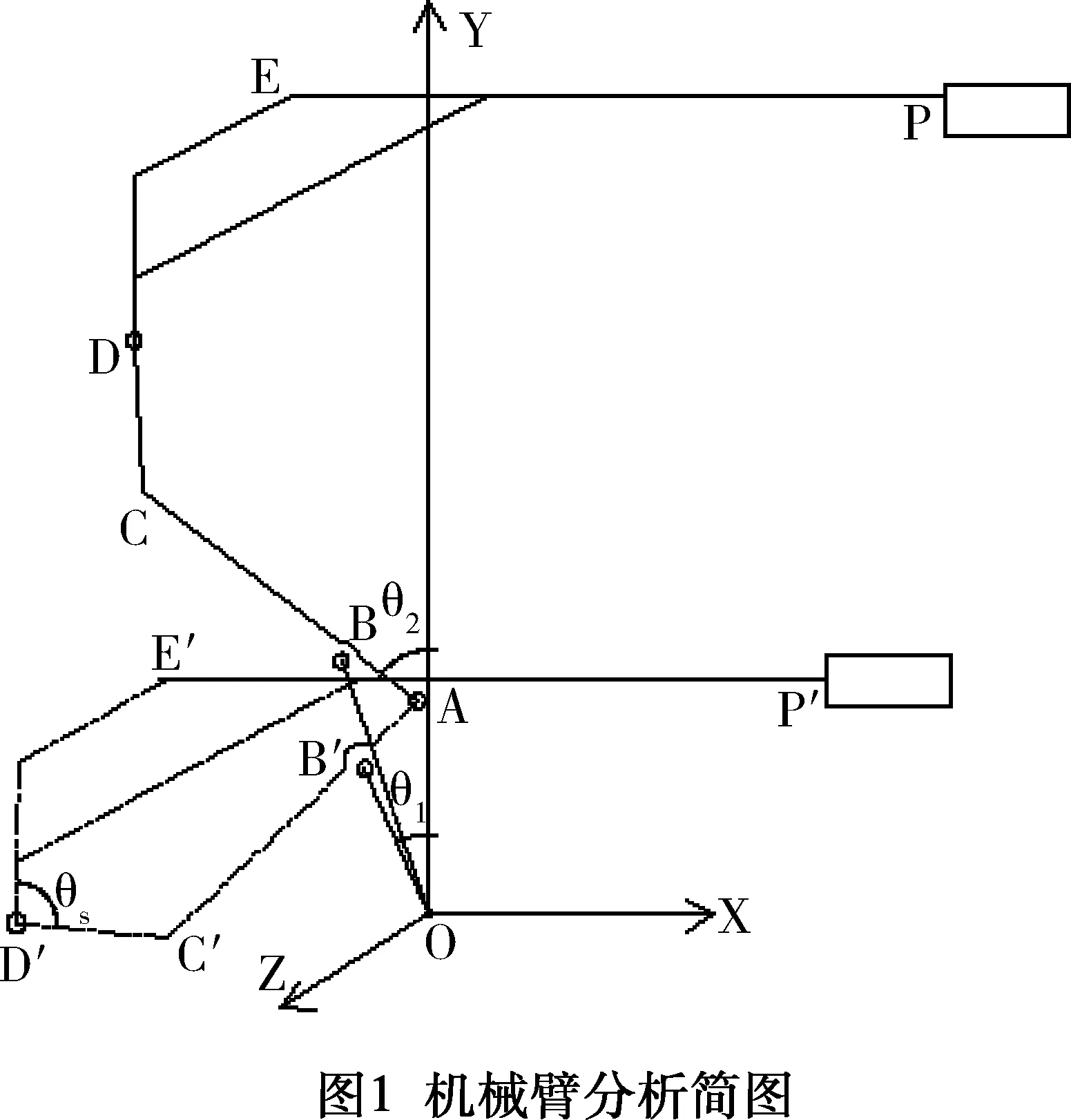
绝缘子的机械水平臂主要结构是两个四连杆机构,和工业电焊机器人原理类似[5]。机械水平臂是在一个垂直的平面内运动,分析机构简图如图1所示。
将建立如图1所示的坐标系,坐标原点为O,弯臂ACD、OA、AB段长度分别为LAC、LCD、LOA、LAB,DE垂直长度为LDE,P到D水平距离为LPD,液压OB距离为L,液压OB的回转角度为θ1,弯臂ACD中AC回转角度为θ2,连杆DC与竖直方向的回转角度为θ3,在零位时,OB′垂直于AC′,θ1、θ2、θ3分别为24°、134°、90°,角度定义为绕Z轴顺时针为负,逆时针为正,开始时,机械臂末端位于P′,经过一段时间后,当液压杆升到一定位置后,机械臂末端到达实际工作位置P,θ3为180°,因此可得出P的初始坐标为:
(1)
根据水平臂运动的实际轨迹分析得出:
(2)
(3)
将(2)、(3)带入(1),得:
这样,绝缘子清洁机械水平臂在运动上实现了解耦[6],因此,通过控制液压杆的运动来控制机械末端法兰沿着三个方向上的位置曲线。
3 绝缘子机械水平臂三维建模及其运动仿真分析
3.1建立绝缘子清洁设备三维装配模型
为了实现对绝缘子的有效清洗,机械臂采用四连杆机构(其中包括弯臂、细杆1和细杆2)和液压驱动,机械臂具有很好的灵活性。针对机械臂的设计方案,运用SolidWorks2012对绝缘子清洁设备进行建模[7],绝缘子清洁设备模型如图2所示,利用ADAMS/VIEW软件对机械运动进行仿真。
根据实际工作需要,绝缘子清洁设备水平臂采用平行连杆机构原理,此处的四连杆机构可以保证水平臂总是保持水平,设计水平臂在液压驱动下到达工位,通过控制刷头电机正反转及其速度,可以将绝缘子清洁干净。作业车的参数见表1。

表1 作业车技术参数

名称技术参数作业平台尺寸(长×宽×高)/mm5000×1600×1200作业车平台地板面距轨面最大高度/mm6800轨距/mm1435使用环境温度/℃-25~45使用海拔高度/m2500最小通过曲线半径/m100承载能力/kg500
3.2建立清洁机械臂运动仿真
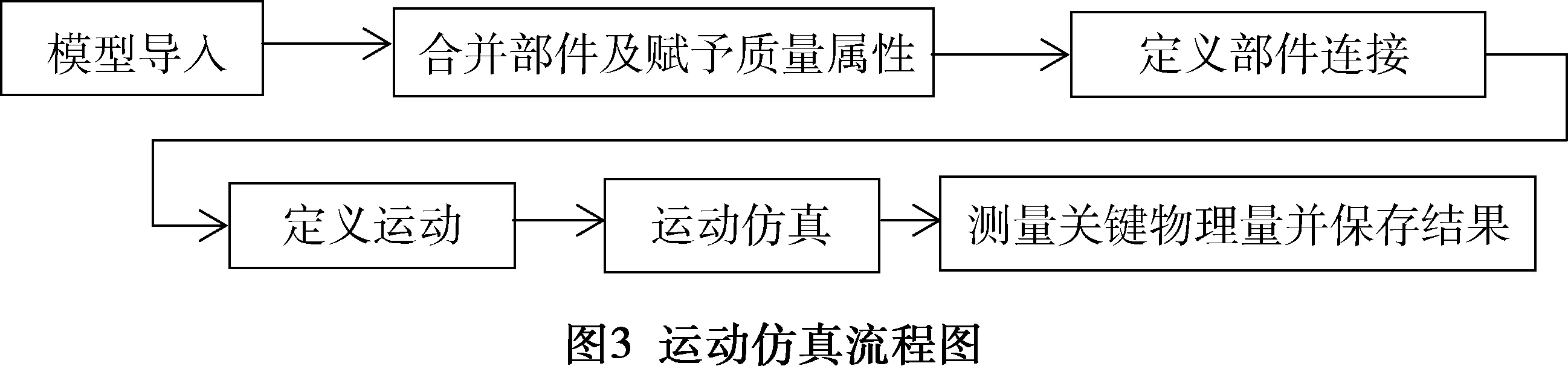
将装配好的绝缘子清洁设备整体装配体另存为parasolid(*.x_t)格式,利用ADAMS/VIEW软件实现对机械臂的运动位移分析,分析步骤如图3所示。
3.2.1 模型导入、修改质量属性
整体装配图parasolid(*.x_t)文件导入ADAMS/VIEW,给新模型命名为:Insulator cleaning equipment,将重力方向定义为-Y轴方向,利用以下程序将零部件赋予相应的质量属性:
For variable name=tempred start.value=1 and value=69 Part modify rigid mass properties&&part_name=(eval(“.part”//RTOI(tempreal))&material_type=.materials.End
3.2.2 定义各零部件之间连接方式
首先将底盘和地面固定,根据实际运动情况将各个零件之间添加如固定副、移动副、旋转副等,从而在液压的驱动下,经过各个零件协同合作水平臂刷头、倾斜机械臂刷头到达工位。
3.2.3 运动仿真
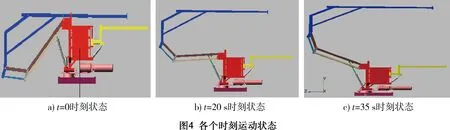
水平臂和倾斜臂输入速度为Z方向,大小分别为-12.54 mm/s、-1.428 mm/s。将End Time设定为35 s,Steps设定为1 000,进行仿真,观察各个构件运动过程,确认零件在各个时间没有干涉,在不同时刻绝缘子机械臂的运动状态如图4所示。
3.2.4 仿真测量
选取绝缘子清洁设备水平臂末端法兰几何中心,首先建立一个新的marker156点(新的marker157点为倾斜臂末端法兰几何中心点),在“Design Exploration”中选择测量工具、类型,分别测量新的marker156点沿着X、Y、Z方向的位置曲线以及两机械臂沿垂直方向Y方向的动态位移变化曲线[8],如图5~图8所示。




从图5可以得出,绝缘子机械水平臂末端在运动过程中沿着X方向位置变化在0~15 mm范围内;从图6可以得出,运动开始时,绝缘子机械水平臂末端处于最低位置,随着时间的增加,按照一条倾斜曲线的形式升高的,当t=35 s时,机械臂的高度达到最大;从图7中可以看出,绝缘子清洁设备机械臂末端位置位移在0~35 s,处于一种从小到大又从大到小的状态,当t=35 s时到达最右端;从图8可以得出,运动开始时,绝缘子机械水平臂和倾斜机械臂之间距离最小,随着时间的增加,曲线按照一条倾斜曲线的形式升高的,当t=35 s时,机械臂的高度达到最大,实际工作时,两个机械臂之间应该给平腕臂和斜腕臂结构留出空间(平腕臂底座到斜腕臂底座1 900 mm(中心线对中心线)),清洁设备机械臂工位时,两臂之间距离为2 485 mm,满足实际需求,因此设计合理。
3.2.5 仿真结果分析
通过仿真得出的曲线可以看出,绝缘子机械水平臂在液压驱动下向上运动,垂直方向(Y)始终保持稳步上升,水平方向(Z)位置位移先从小到大再从大到小,在X轴方向上机械臂末端位置位移变化在0~15 mm范围内变化,沿X轴方向变化不大,并且在这个运动过程中绝缘子清洁设备各个零件之间没有相互干涉情况发生。
从这个仿真结果看,模型的各个零件构件运动过程和预期设计基本相同,达到了预期效果,因此,该种设备可以实现对瓷瓶绝缘子的清洗。
4 结论
针对瓷瓶绝缘子清洁设计的绝缘子清洁设备,利用SolidWorks2012软件对该种清洁设备进行三维建模,利用Adams软件对三维模型进行运动仿真,通过仿真动画可以直观地观察绝缘子清洁设备的水平臂末端的运动轨迹以及两机械臂距离曲线,为机械臂静态、动态特征的进一步分析提供了条件和依据。通过观察水平机械臂末端的位置沿三个方向位移的变化曲线以及两机械臂距离曲线,验证了所设计的绝缘子清洁设备是符合实际需要。因此,绝缘子清洁设备机械臂以其独特的功能,将成为普通铁路上瓷瓶绝缘子清洁的良好助手,不但可以提高绝缘子清洁的自动化水平,还可以减低污闪事故的发生,同时大大减低人工操作的劳动强度,提高绝缘子清洁的安全指数,具有良好的商业前景。
[1] 杜益刚,田洪强,张文志.基于Pro/E的变电站绝缘子清洁机械臂的设计仿真[J].制造业自动化,2013,35(7):133-136.
[2] 李健,鲁守银,王振利,等.220 kV变电站带电作业机器人的研制[J].制造业自动化,2013,35(9):83-86.
[3] 白雪莲,杨玲.浅谈输变电设备的防污闲措施[J].中国电子商务,2010(4):167.
[4] Joon-Young Park.Development of Cleaning Robot System for Live-line Suspension Insulator Strings[J].International Journal of Control,Automation,and Systems,2009,7(2):211-220.
[5] 徐冬.全方位移动机械手运动控制方法的研究[D].北京:中国科学院自动化研究所,2008.
[6] 文怀兴,雷晓丽.采用Trio运动控制器的搬运机器人控制系统研究[J].现代制造工程,2011(4):38-41.
[7] 刘长征译.精通SolidWorks2003[M].北京:清华大学出版社,2004.
[8] 李波,刘念,李瑞叶.变电站绝缘子污秽在线监测技术[J].高电压技术,2008,34(6):1288-1291.
DesignandSimulationofInsulatorCleaningArm
JIANG Hong-min, WU Wen-jiang
(Department of Mechanical Engineering, Shijiazhuang Tiedao University, Shijiazhuang 050043, Hebei, China)
Aiming at the problem that the insulator cleaning was difficult to be automated in the current railway line, the robotic arm with strong adaptability for insulator cleaning was designed. The characteristics of the manipulator and the cleaning process of insulator were described. The three-dimensional parts model of the machine were built and assembled by using SolidWorks software. Simulated with ADAMS/VIEW software, the movement of the position curve of the horizontal arm end flange of the manipulator were obtained alongX,Y,Zdirection, which provided the basis for the further optimization of the manipulator.
insulators; cleaning; manipulator; modeling; simulation
TH122
A
1008-9446(2017)05-0020-05
2016-12-01
姜红敏(1990-),女,河北廊坊人,在读硕士研究生,主要研究方向为设备轻量化设计,E-mail:13393236532@163.com。
猜你喜欢
物流技术与应用(2022年8期)2022-08-26
计算技术与自动化(2022年1期)2022-04-15
重型机械(2020年2期)2020-07-24
物流技术与应用(2020年4期)2020-05-06
电子制作(2018年17期)2018-09-28
中国自行车(2018年8期)2018-09-26
石油化工建设(2018年2期)2018-07-11
制造技术与机床(2017年3期)2017-06-23
凿岩机械气动工具(2016年2期)2016-11-11
通信电源技术(2016年3期)2016-03-26