基于气动肌肉的可穿戴式上肢外骨骼助力机器人动力学仿真
2017-12-13 03:22宋晓明洪红伦付鑫涛韩彦龙
承德石油高等专科学校学报 2017年5期
谷 巍,宋晓明,洪红伦,付鑫涛,韩彦龙
(承德石油高等专科学校 机械工程系,河北 承德 067000)
基于气动肌肉的可穿戴式上肢外骨骼助力机器人动力学仿真
谷 巍,宋晓明,洪红伦,付鑫涛,韩彦龙
(承德石油高等专科学校 机械工程系,河北 承德 067000)
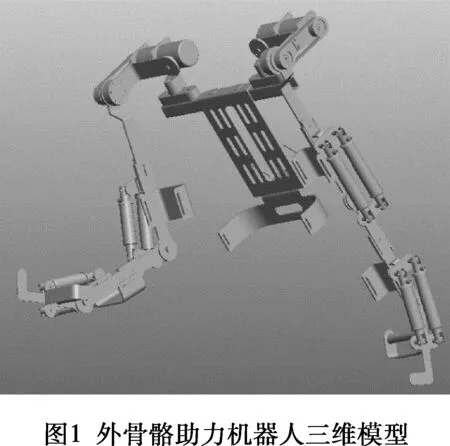
依据仿生设计原理,设计了一种基于气动肌肉的可穿戴式上肢外骨骼助力机器人,并进行了动力学仿真分析。参考人体肩关节、肘关节、腕关节的运动机理及特性参数,设计外骨骼的机械结构,运用Pro-e软件建立其三维装配体模型,将其导入ADAMS中进行动力学仿真。通过仿真分析得到大、小臂等的角速度和角加速度以及各个关节的力矩变化规律,验证了设计的合理性与正确性,为机器人智能控制提供了理论基础。
气动肌肉;穿戴式;外骨骼;助力机器人;动力学
穿戴式外骨骼助力型机器人建立在机器人学、人体解剖学、智能控制理论[1]与人机交互等学科之上,其主要作用是增强人体机能,拓展人类的劳动范围,在军事方面和医疗方面得到了广泛的应用[2]。美国自上世纪70年代就开始研究外骨骼机器人,其成果主要应用于军事,典型代表有GE的Hardiman、加州大学的BLEEX和亚利桑那州立大学的RUPERT[3]。与国外相比,国内穿戴式外骨骼机器人的研究在近十年才有了较大发展。国内从事外骨骼机器人研究的单位有中科院自动化所、哈尔滨工业大学、浙江大学和上海大学等。哈尔滨工程大学和中国科学技术大学在穿戴机器人的信息采集以及步态分析方面也有比较深入的研究。本文依据仿生学原理,结合人体上肢运动形式及目前需求设计了一款军民两用多功能助力型机器人——可穿戴式上肢外骨骼助力机器人,对其进行动力学建模和仿真分析,验证了设计的合理性和正确性[4]。
1 助力机器人结构设计
1.1机械结构设计
骨骼和肌肉组成人体的运动系统,骨骼在人体运动过程中起支撑作用,肌肉按照大脑意图进行收缩与舒张,牵拉协助骨骼绕关节转动,人体通过这种方式来实现各种运动。人体上肢由大臂、小臂、肩关节、肘关节、腕关节和手腕组成,手臂包含7个自由度,手掌包含20个自由度,一共27个自由度[5]。
助力机器人背部支架与人身体紧密接触,考虑人体的舒适度,需增加背部支架与人体的接触面积,设计成类似书包功能,起到平衡负载转矩的同时,也可以起到“仓库”的作用;肩部结构通过两块铝制金属板材与背部结构紧密相连,起到桥梁作用,一端与背部相连接,另一端与肩关节相连接;肩关节可以做屈/伸、收/展、旋转运动,实现外骨骼助力功用;肘关节将大臂和小臂连接起来,在肘关节外侧,布置两根对位牵拉的气动肌肉[6],气动肌肉一端固定在大臂上,另一端固定在小臂上,当气动肌肉充气时,将带动小臂向上运动,使得所提重物从与小臂平行位置到达与手臂垂直位置;腕关节作为执行部件末端,起到承担负载作用,当腕部接触重物时,通过调节小臂上的气动肌肉,实施牵拉腕部,带动重物向上运动,提起重物;气动肌肉是一类新型的气动执行器,相比于电机、液压缸等驱动器,气动肌肉有良好的柔顺性,可减小机器人柔顺控制中人与环境之间的撞击。因其结构简单、质量轻、良好互换性、对人体无害[7]等优点在机器人助力方面得到广泛应用。本文采用气动肌肉作为助力机器人的驱动器。助力机器人具体结构参数如表1所示。

表1 结构参数
1.2强度计算
穿戴式外骨骼助力机器人的结构强度必须满足设计要求,避免因强度不够造成人体伤害。根据力学知识,对其关节转矩进行计算,得到:
T腕关节=15.1 N·m,FLw=600 N,T肘关节=55.44 N·m,FLe=1 429 N。
以上计算得到的关节转矩和受力极限值,均满足设计要求。
2 机器人动力学分析
2.1模型简化

2.2机器人手臂动力学建模
大臂1号杆的动能和重力势能为:

式中,m1为大臂质量;r1为大臂质心到末端距离;g为重力加速度;θ1为大臂转角。
小臂连杆2的动能和重力势能为:

式中,m2为小臂质量;r2为小臂质心到末端距离;θ2为小臂转角。
系统总动能与总势能为:
K=K1+K2
P=P1+P2
拉格朗日函数L定义为系统的动能与势能之差:
新时期,随着信息技术的提升,企业之间的竞争非常激烈,中小企业发展也受到影响。中小企业在我国经济发展中发挥着非常重要的作用,只有不断探索中小企业的管理模式,才能提升企业的竞争力。在经济法视角下中小企业管理存在的问题进行分析,寻求相关的解决措施,从而完善中小企业的管理模式。
L=K-P
2.3气动肌肉动力学建模
同机器人手臂动力学建模过程,得到气动肌肉的动力学模型:

2.4整个穿戴式外骨骼助力机器人手臂动力学建模
将机械手臂模型和气动肌肉建模线性叠加在一起,考虑外加负载产生的力矩Te(t),得到整个穿戴式外骨骼助力机器人手臂的动力学模型:

3 动力学仿真与结果分析
穿戴式外骨骼机器人手臂的仿真过程为:首先在Pro/E软件中对机械手臂进行简化[8],去掉后面的背部支架以及一些不影响仿真结果的联接螺栓,并将一些静止的零部件固定在一起;然后导入到ADAMS,确定各部分零件模型参数,添加运动副,在肩关节、肘关节和腕关节施加转矩驱动,系统自动计算出手臂的质量和转动惯量等物理参数,确定重力方向,设定运动副的转角范围,外加负载50 N;完成上述步骤后,设置仿真时间40 s,仿真步数1 000,输出仿真结果。通过仿真,得到简化模型,各部分的角速度与角加速度图和力与转矩图如图3~图9所示。
图3中,大臂的角速度最大3 rad/s;0 s到7.5 s角速度逐渐增大,手臂开始向上运动;7.5 s到15 s角速度由最大减小为0,手臂平稳减速运动到指定位置;15 s后大臂角速度为0,维持手臂平衡用于搬运重物。整个运动过程中,机械大臂的角速度曲线平滑,虽然在0 s和15 s时角速度有突变,但不影响机械手臂提取重物,这种相对平稳曲线正是预期所要达到的。图4中,大臂角加速度在0 s和15 s时最大,最大0.8 rad/s2;在初始的时候,角速度突然增大,对大臂有冲击,在15 s时,角加速度有突然震荡,这与外加载荷和其他关节运动状态有关。所以,要尽量减小冲击的产生,防止外骨骼与人体之间产生相互作用,造成危害。在外骨骼设计过程中,外骨骼与人体之间预留一定空间,增强人体对穿戴式外骨骼的协调性。
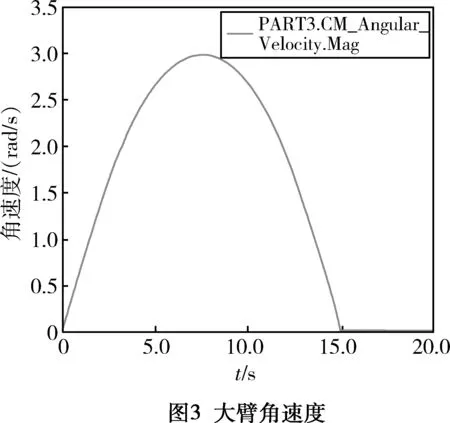

图5中,小臂的角速度在7.5 s时达到最大值2.4 rad/s2,是大臂角速度的3倍,可以看出小臂在运动过程中响应比较快速,在大臂的带动下,小臂能快速地提起重物;在15 s后机械手大臂和小臂保持相对静止状态,曲线没有受到外界的干扰。小臂的角速度曲线也比较平稳,没有出现大的波动,这种正弦曲线有利于机械手臂提起重物。图6中,小臂的角加速度最大值为2.4 rad/s2,是大臂角加速度的3倍;角加速度在0 s和15 s时刻变化很大,对外骨骼有冲击震动。小臂的加速度曲线不是很平稳,在开始和结束运动过程中出现反复震荡,这样很容易造成关节连接点处的移位。因此,在外骨骼设计过程中,在关节连接点处,要保证间隙配合,避免出现关节之间的相互挤压破坏[9]。
图7中,腕关节角速度在7.5 s时达到最大值,整体为正弦曲线变化规律,运动平稳,没有急速转向。图8中,腕关节的角加速度最大值为3.25 rad/s2,在开始和结束时的角加速度很大,对外骨骼有冲击影响,穿戴者在提起重物瞬间要避免与外骨骼之间干扰,尽量减小加速度有较大的变化,同时还要保证外骨骼有较大的速度。




图9a)~图9c)表明,腕关节最大转矩13 000 N·mm,比理论设计值15 100 N·mm小,符合要求;肘关节最大转矩52 000 N·mm,理论校核最大转矩为55 440 N·mm,二者比较接近,与实际相符;肩关节最大转矩78 000 N·mm,理论肩关节转矩为86 500 N·mm,满足要求。肩关节的转矩由电机提供,肘关节转矩由气动肌肉提供,人体本身也可以提供一些转矩。由于附加外载荷,肩关节和肘关节的转矩在0到10 s快速增加,在10 s之后转矩维持不变。肩关节和肘关节的转矩曲线在开始出现微小波动,之后出现加速上升过程,此时机械手臂正在提起重物,需要提供很大的转矩,理论与实际相符。在15 s之后转矩保持不变,与外加负载力矩相互平衡,维持运动状态。转矩的变换与各关节之间转角变化有关。避免外骨骼机器人各个关节转角变化范围过大,产生很大的关节转矩,挤压肩部,造成身体不适。外载荷越大,关节转矩越大,因此关节转矩是制约外骨骼承载外力的主要因素之一。

综合分析可知,在整个仿真运动过程中,穿戴式外骨骼大臂和小臂整体运动,从竖直方向运动到与身体水平位置,整个过程模拟了人体提取重物过程,仿真与所设计的机械运动关系相符。
4 结论
1)对穿戴式外骨骼机器人的机械结构进行简化,建立起气动肌肉的力学建模,然后进行动力学分析,综合建立起整个外骨骼机器人的动力学方程。
2)运用ADAMS软件仿真,得出大臂小臂的角速度和角加速度,以便准确控制外骨骼提取重物。在手臂末端施加外力,测得各个关节的转矩,通过气动肌肉施加外力来补偿转矩,实现外骨骼助力。
[1] 蔡兆云, 肖湘江. 外骨骼机器人技术研究综述[J]. 国防科技, 2007(12):6-8.
[2] 柴虎, 侍才洪, 王贺燕,等. 外骨骼机器人的研究发展[J]. 医疗卫生装备, 2013, 34(4):81-84.
[3] Sakurai T, Sankai Y. Development of motion instruction system with interactive robot suit HAL[C]//IEEE International Conference on Robotics and Biomimetics. IEEE, 2009:1141-1147.
[4] 桂仲成, 吴建东, 李永龙. 2009日本国际机器人展综述[J]. 东方电气评论, 2010, 24(3):69-78.
[5] 张佳帆. 基于柔性外骨骼人机智能系统基础理论及应用技术研究[D]. 杭州:浙江大学, 2009.
[6] 杨刚, 李宝仁, 刘军. 一种新型气动执行元件——气动人工肌肉[J]. 中国机械工程, 2003(15): 93- 95.
[7] 许祥, 侯丽雅, 黄新燕,等. 基于外骨骼的可穿戴式上肢康复机器人设计与研究[J]. 机器人, 2014, 36(2):147-155.
[8] 陈峰, 卞丽琴, 吴宝元. 可穿戴型助力机器人动力学分析与仿真[J]. 实验科学与技术, 2009, 7(1):30-33.
[9] 严华, 杨灿军, 陈杰. 上肢运动康复外骨骼肩关节优化设计与系统应用[J]. 浙江大学学报, 2014, 48(6): 1086-1094.
DynamicSimulationofWearableUpperLimbPowerAssistedRobotBasedonPneumaticMuscle
GU Wei, SONG Xiao-ming, HONG Hong-lun, FU Xin-tao, HAN Yan-long
(Department of Mechanical Engineering, Chengde Petroleum College, Chengde 067000, Hebei, China)
For the wearable exoskeleton robot, the complicated mechanical structure and low position precision limits its application scope. Based on the bionic design principle, a kind of wearable arm exoskeletons power robot based on pneumatic muscle is designed, and the dynamic simulation analysis is done. Referring to the movement mechanism and characteristic parameters of human shoulder elbow and wrist, the mechanical structure of the exoskeleton is designed, using Pro-e software to build the three-dimensional assembly model, then importing into ADAMS for dynamic simulation. The angular velocity and angular acceleration of the large and small arms, as well as the torque variation of each joint, are obtained by simulation analysis. The rationality and correctness of the design are verified, which provides a theoretical basis for robot intelligent control.
aerodynamic muscle; wearing type; exoskeleton; power robot; dynamics
TP242
B
1008-9446(2017)05-0029-06
2016-12-13
谷巍(1988-),男,辽宁葫芦岛人,助教,硕士,主要从事穿戴上助力外骨骼机器人的研究,E-mail:2244707496@qq.com。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
包装与食品机械(2021年5期)2021-11-06
环境技术(2021年4期)2021-09-11
小哥白尼(野生动物)(2021年12期)2021-03-29
高师理科学刊(2020年2期)2020-11-26
制造技术与机床(2019年12期)2020-01-06
组合机床与自动化加工技术(2019年5期)2019-05-24
载人航天(2016年4期)2016-12-01
工业设计(2016年6期)2016-04-17
综合智慧能源(2014年1期)2014-09-10