微弱光信号的极值检测及滤波算法研究
2018-03-16 06:20张晓楠陈杰高皜蔡玉龙刘杰李正宝
山东科学 2018年1期
张晓楠,陈杰,高皜,蔡玉龙,刘杰,李正宝
(齐鲁工业大学(山东省科学院),山东省科学院海洋仪器仪表研究所,山东 青岛 266001)
海洋光学传感器一般采用光电子学原理,将光信号转换为电信号,并进行处理或传输[1],影响系统性能的关键因素是光电信号极值的精确测量。在此类问题的研究中,被测信号变频、变幅的特点导致信号在时域和频域上存在动态变化[2],传统测量方法无法获得信号的有效极值,影响了测量精度。同时,微弱光信号易受到背景光等干扰,转换后的电信号易受到噪声、供电系统纹波、串扰等干扰[3-5],导致信号的频率、相位、占空比等参数发生变化甚至产生畸变,进一步影响了测量精度。因此,本文的研究目的是得到高精度的微弱光电信号的极值(波峰、波谷值)。
在光电信号检测研究中,首先通过设计滤波器滤除信号的噪声干扰[6]。模拟滤波器的R、C、L元件存在温漂问题,很难精确地稳定其工作特性。对于频率很低的信号,模拟滤波器几乎无法检测。而且,单纯的模拟滤波器不能检测信号的波峰、波谷值。近年来,数字检测滤波已经发展成为一项成熟的技术,具有精度高、灵活性好、可靠性高等优点[7-8]。胡锦等[9]采用改进阈值算法,虽然可以提高稳定信号的测量精度,但主要针对固定范围、固定特征的信号,对本文研究的受干扰信号不适用。马俊等[10]采用两种算法相结合的方式,提高了数据的稳定性,但是对受干扰信号的测量存在可操作性差、测量精度低的问题。
为有效提高微弱光电信号极值检测的精度,本文分析了被测信号的动态变化规律,建立了相关理论模型。针对已有算法不能解决受干扰信号极值高精度检测的问题[11],提出了一种波峰、波谷检测滤波算法,保证了测量精度及稳定性。
1 数学模型
根据海洋光学传感器的测量原理,微弱光电信号的幅值、频率、相位等特性与被测参数具有相关性。以光学溶解氧传感器为研究模型,水体中不同的氧浓度会激发不同强度和相位偏移的荧光信号,信号的幅值与被测参数的浓度具有反比关系,通过测量信号相位和强度的变化可以反应出氧浓度的大小。在测量过程中,荧光信号的幅值是动态变化的,这种变化具有一定的规律,与随机干扰具有互不相关性[12]。针对这个特点,在信号的测量中,可以通过一定的算法将干扰信号与有用信号区分,并有效检测有用信号的极值。在传感器的每一次极值检测中,被测信号的特征是稳定的,并且不同周期具有相关性。但在不同次的测量中,信号具有独立性。根据以上分析,我们建立如下的数学模型对被测信号进行定义[13]:
λi(t)=λisin(ωit+φi)+Fi(t)+λj,
(1)
其中,λisin(ωit+φi)+λj为第i次测量过程中的有效信号,Fi(t)为随机的干扰信号,两者相互独立;λi为信号的振幅;ωi为信号的频率,λj为信号的初始偏移。我们根据以上模型设计相关的检测滤波算法。
2 波峰、波谷值检测滤波算法
2.1 理想信号的检测滤波算法
在理想信号的检测过程中,由于信号中没有混杂噪声,因此Fi(t)=0,接收到的信号表示为:
λi(t)=λisin(ωit+φi)+λj,
(2)
这时的信号具有波形平滑、单调性交替变换的特点。针对信号这种变化规律,本文设计了一种快速高精度的检测算法,算法的理论基础和实现过程如下。
(1)获得信号一个周期内的极值Ym、Yn。
在信号一个周期[0,T]内,以Δt的时间间隔对信号进行采集,得到采样集合Y={yi|yi=λi(t)},t∈[0,T],yi代表在ti时刻的采集值。根据信号单调性交替变化的特点,一定存在ym和yn,满足以下关系:
{ym>ym-1}∩{ym>ym+1},
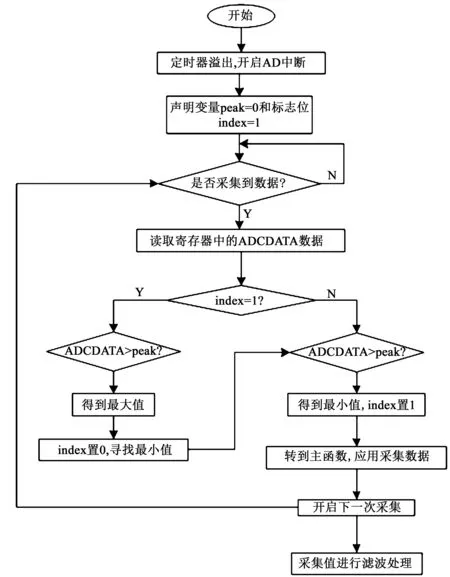
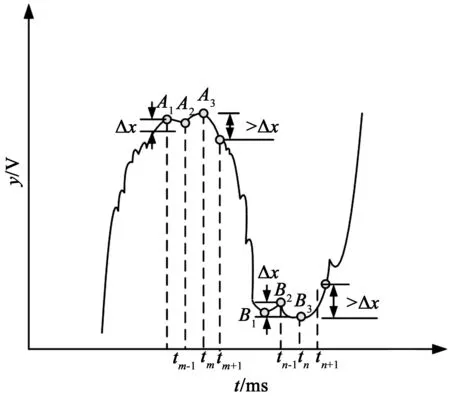
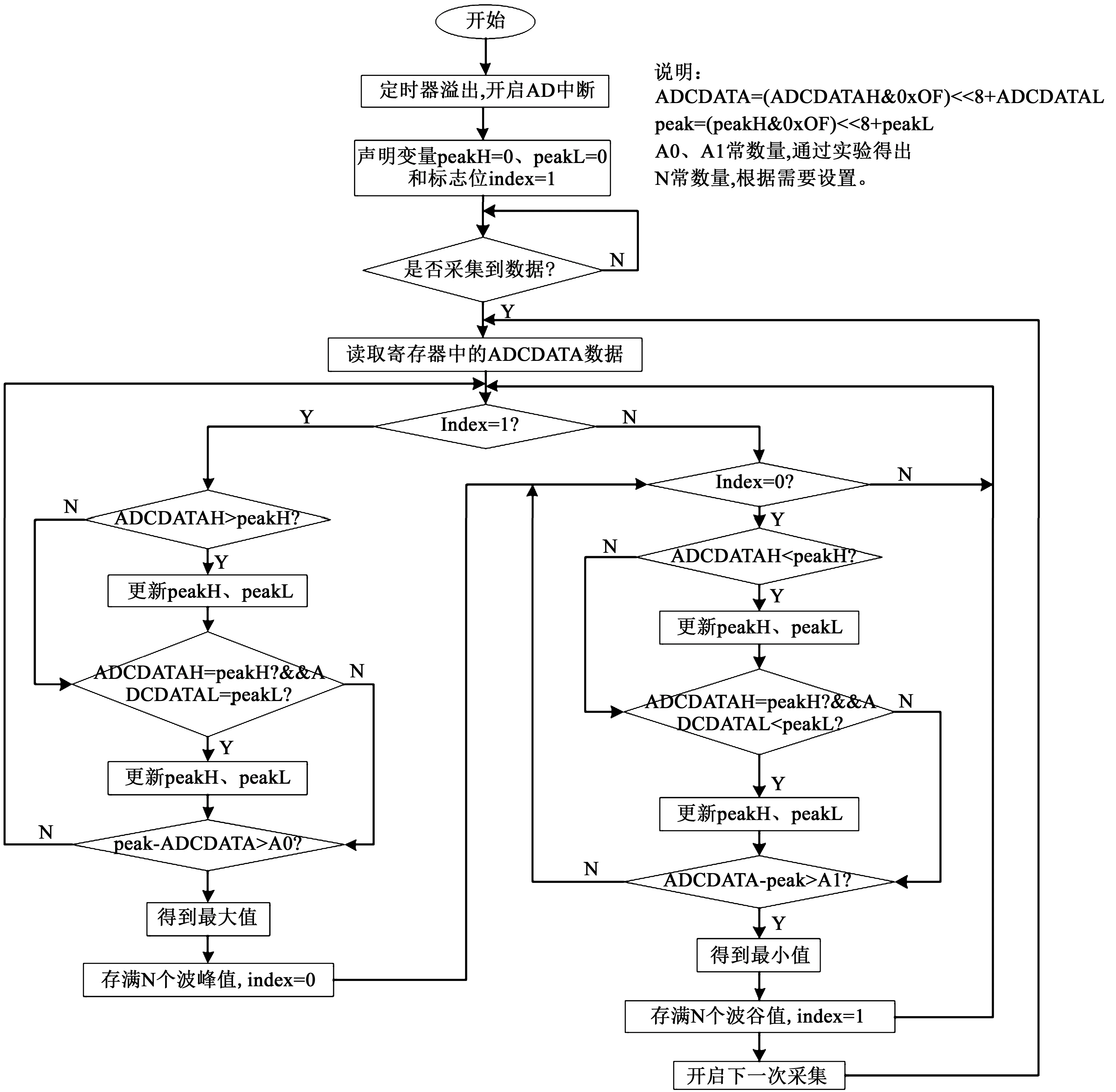
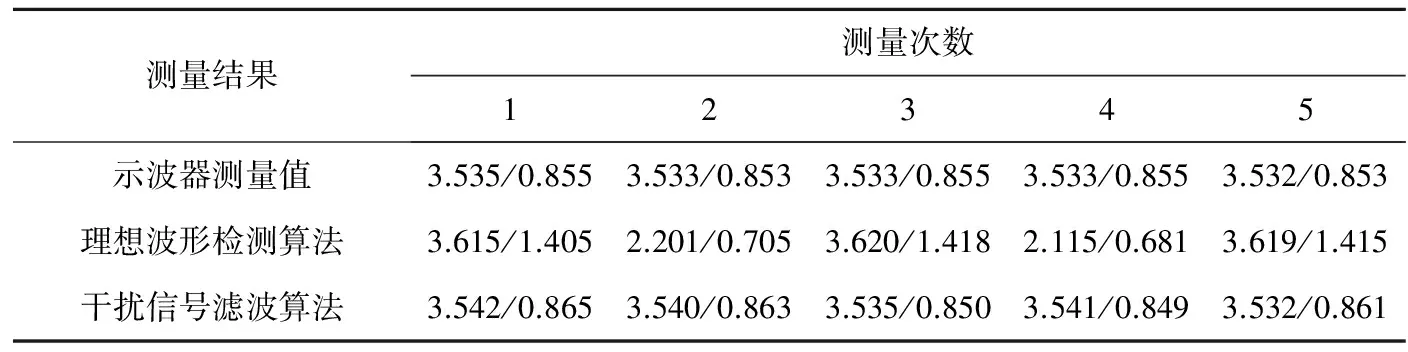
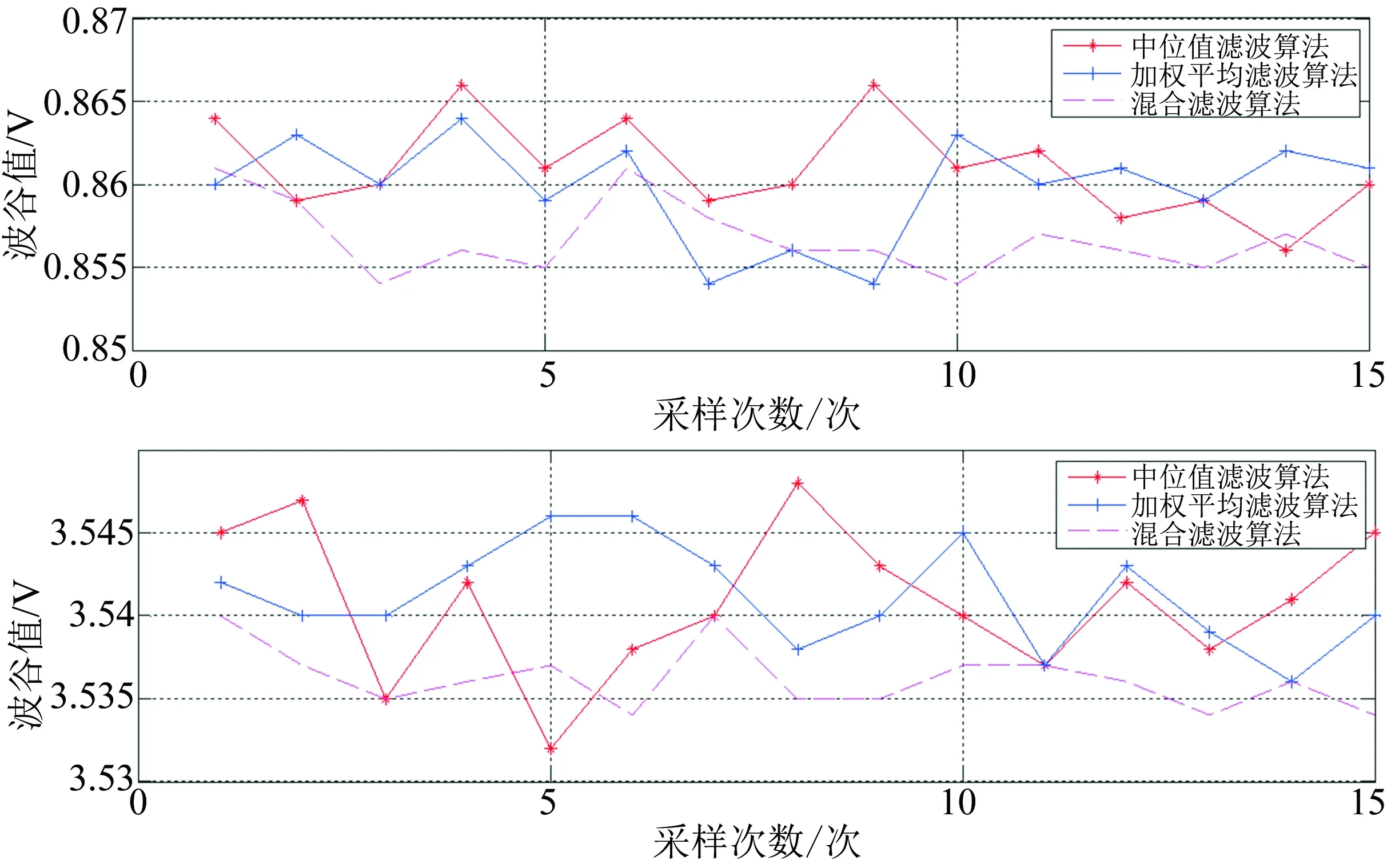
{yn 则ym为极大值,即波峰值;yn为极小值,即波谷值(图1)。 图1 信号极值检测Fig.1 The extreme value detection of the signal 以上理论分析的具体实现算法的流程如图2所示。 图2 极值检测流程图Fig.2 Flow chart of the extreme value detection (2)连续取N个周期,得到信号的极值序列Ym,Yn。 在实际采样测量过程中,受测量环境的影响硬件电路系统时钟产生小范围的波动,采样频率存在漂移和抖动。这种随机抖动导致测量时刻不精确,降低了系统的测量精度。因此,算法采用连续取N个周期的极值并对采集值进行滤波处理的方法来提高系统的测量精度。算法连续获得N个周期的极值点形成的极值序列为Ym,Yn,其中极大值序列Ym={Ym(1),Ym(2),…,Ym(N)},极小值序列Yn={Yn(1),Yn(2),…,Yn(N)}。 (3)采用算术平均滤波算法获得目标极值。 考虑到信号具有一定的稳定性,结合算法的计算复杂度和响应时间,本文采用算数平均滤波法对采集样本进行平滑处理,降低测量过程中的随机误差。算法最终输出的极值为: (3) (4)本次测量结束,从步骤1开始重复以上过程。 Δλ=λ1(tm)-λ1(t1) =λ1(tm)-λ1(t2) 通过以上公式,我们得到了测量误差、信号特征与采集间隔的关系。在实际应用中,λ1、φ、T的取值在一定范围内,可以被视为已知量。需要根据实际精度需求Δλ来确定采样间隔Δt,在满足精度的同时,确保采样间隔尽量小。算法采用N个周期取平均值的方法,可以提高采样精度,采样样本N越大,精度相对越高,但同时会增加响应时间。因此在实际应用中,应在满足响应时间的前提下,选择合理的采样样本N,为了保证精度,一般N>5。 通过以上算法,系统可以精确得到信号周期内的极值点,程序实现较简单,具有较小的响应时间。采用算数平均滤波法对周期性干扰有良好的抑制作用[14],但是对随机干扰不能起到很好的作用,因此,要对算法进行改进。 在海洋光学传感器的测量过程中,海洋环境中的光信号复杂多变,易受背景光、杂散光的影响,光电转换后的电信号易受噪声等干扰。因此,实际测量的电信号混杂较多的噪声,导致波形不平滑,其单调性规律被破坏。用2.1中算法采集时,一个周期内会得到多个极值点A1、A2、A3、B1、B2、B3,其中A1、A2、B1、B2为伪极值点,A3、B3为实际极值点,如图3所示。因此,该检测算法影响了系统的测量精度。通过分析带干扰的被测信号的波形规律,对2.1节算法进行改进,可以优化性能、提高测量精度。 图3 不平滑信号波形Fig.3 Unsmooth signal waveform 图4 改进的极值检测流程图Fig.4 Flow chart of the improved extreme value detection (1)获得带干扰被测信号一个周期内的极值Xm、Xn {xm+1 {xn+1>xn}∩{xn+1>xn+Δx′}。 当满足xm+1 (2)连续取N个周期,得到信号的极值序列Xm,Xn 考虑到样本数N越大,经过滤波处理后,系统的误差越小。因此,在满足响应时间的条件下,增加了极值序列样本数,N=10。 (3)采用复合滤波算法获得目标极值 在进行滤波算法设计时,要消除大幅度的脉冲干扰,同时需要抑制小幅度噪声,做数据平滑,本文采用复合滤波法。首先,考虑滤除由仪器外部环境的偶然因素引起的突变性扰动或仪器内部不稳定引起误码等造成的尖脉冲干扰,作为数据处理的第一步。中值滤波算法对采样样本的利用率低,故采用基于中值数绝对偏差的滑动滤波法来滤除噪声数据,并可以用有效的数值来取代该噪声数据。具体步骤如下: (i)将极值序列{Xm(N)}进行排序,得到中值Z; (ii)计算得到中值偏差序列{d(N)}={|Xm(0)-Z|,|Xm(1)-Z|,…,|Xm(N-1)-Z|},这样就得到了每个数据点偏离参照值的尺度,对中值偏差序列{d(N)}排序,得到该序列的中值D; (iii)根据著名统计学家F. R.Hampel提出并证明了的中值数绝对偏差关系:存在M=1.482 6D; (iv)令q(k)=|Xm(k)-Z|,k=0,1,…,N-1,选择一个门限参数L,其值决定了滤波器主动舍弃数据的进取进度[15],L越大,Xm(k)被舍弃并用中值取代的可能性越小,要根据实际选择[16-17],本设计选择L=5;将q与L*MAD进行比较,若q(k) (v)当采集到一组新的极值时,则更新队尾数据,舍弃队首数据,这样始终保持有N个“最新”数据。重复(i)~(iv)的过程,得到最新的极值序列: {Xm(N)}={Xm(0),Xm(1),…,Xm(N-1)}, {Xn(N)}={Xn(0),Xn(1),…,Xn(N-1)}。 (4) (5) 其中,f0+f1+…+fN-1=1,0 通过以上算法,系统可以精确地采集到受干扰信号的周期内的极值点。而且,复合滤波算法克服了算数平均滤波法对随机性干扰处理效果差、实时性差等缺点[18-19],既能滤除大的脉冲干扰,又能克服小的噪声干扰,保证了数据的精度。 算法设计完成之后,本文以ADuC841单片机为核心构建了实验系统,其A/D位数为12位,测量范围为0~4.096 V,最小采样时间为ns数量级,本设计采用5 μs的采样周期。采用C语言编程实现算法,在实验系统上进行算法验证。以任意波形发生器产生的标准正弦波信号作为理想信号的测量信号,产生的高频正弦波信号和低频正弦波信号组成的谐波分量与可控噪声电平相结合形成的波形作为混杂噪声信号的测量信号。在算法检测过程中,将测量信号输入到DSO-X 3104A型示波器中,对信号进行评估,其每秒最大采样点数为4×109个,可以全面检测算法针对不同波形的测量准确度。实验时,利用理想波形检测算法对标准正弦波进行检测,记录信号的波峰、波谷值,与示波器测量结果进行对比。为进一步探讨带干扰信号检测算法的改进效果,利用理想信号检测算法和受干扰信号检测算法分别对波形发生器产生的混合信号进行检测,分析两种算法的测量结果,分别记录两种算法与示波器测量值的对比结果。利用标准差和平均相对误差来考核稳定性和测量精度。 理想信号检测算法是一种常规的测量算法,一般通过不同的滤波算法来提高数据的稳定性。图5中数据反映了测量值与真实值具有很好的相关性,未加滤波处理时,数据存在不稳定的情况;中位值滤波可以滤去一些脉冲干扰,但数据的跳动较大,波动范围在±4 mV。表1中数据为平均相对误差和标准差的计算值,可以看出,采用算数平均滤波法,对周期性干扰相当有效,数值的稳定性明显提高,波动范围控制在±2 mV,平均相对误差最小达到0.1%。 表2给出了理想信号检测算法和干扰信号检测算法针对波形发生器输出的模拟干扰信号的测量对比结果,可以看出,理想信号检测算法的测量值与真实值不相关,无法获得信号的正确极值。而干扰信号检测算法的测量值与真实值有良好的相关性,说明该算法可以将信号部分和干扰部分区分开,从而得到信号的正确极值,由于信号波形的不确定性,相比于标准信号极值的测量,该信号的极值测量存在误差大的问题,需要滤波做进一步处理。 图6重点分析干扰信号检测算法的滤波处理,记录了多组不同滤波算法的处理结果,每组滤波算法截取了15次连续的输出结果。可以看出无论采用中位值滤波算法还是加权平均滤波算法,其滤波效果都不能满意,数据随机性大,变化范围在±15 mV。经过复合滤波算法处理后的数据明显更趋于真实值,并且更加稳定,变化范围缩小到±5 mV,表3中数据为平均相对误差和标准差的计算值,可以看出,经过混合滤波算法后,最小平均相对误差控制在0.1%左右,满足精度要求。 图5 理想信号检测算法对标准正弦波的测量结果Fig.5 Experimental results of the ideal signal detection algorithm for the standard sine wave 表1 理想信号滤波算法的平均相对误差和标准差计算结果Table 1 The average relative error and standard deviation of ideal signal 表2 两种检测算法测量结果Table 2 Experimental results of two kinds of detection algorithms 单位:V 图6 带干扰信号检测算法的滤波对比结果Fig. 6 Filtering contrast results of the detection algorithm with interference signals 表3 干扰信号检测算法的平均相对误差和标准差计算结果Table 3 Average relative error and standard deviation of the detection algorithm with interference signals 本文提出了一种基于干扰信号的极值检测滤波算法,该算法能够滤除信号中的尖峰干扰部分,快速精确地得到信号的波峰、波谷值。实验结果表明,测量所得结果与实际值一致,算法的测量精度明显高于已有算法[20],可应用于微弱信号的极值检测以及快速实时滤波。该研究为提高微弱信号的抗干扰能力以及系统的测量精度提供了参考依据。除了文中提到的噪声导致信号形成图3所示波形外,信号还会受到环境中其他噪声的影响,产生其他畸变,对于去除这种复合噪声还需要进一步地研究。 [1]胡轶. 海洋原位光学信号高精度定量测量方法研究及传感器研制[D]. 杭州:浙江大学,2014. [2]陈宇晨,柯昌剑,杨松宝,等. 基于超高分辨率光谱分析的周期光信号相对相位测量方法[J].光子学报,2015, 44 (6):0606002. [3]梁志国,孙璟宇,盛晓岩. 正弦信号发生器波形抖动的一种精确测量方法[J].仪器仪表学报,2004, 25(1):23-29. [4]李一兵,岳欣,杨莘元. 多重自相关函数在微弱正弦信号检测中的应用[J].哈尔滨工程大学学报, 2004,25(4):525-528. [5]张玉春,杨成峰,王文娟,等. 基于小波变换的数字滤波算法[J].广东电力,2007,20(12):9-11. [6]米宝永. 从噪声中提取弱光信号的采样跟踪滤波器[J].光学精密工程,1998,6(1):95-100. [7]陈忠明,唐厚君. 变频器信号中大幅值噪声的数字滤波算法[J].测控技术,2005(24)8:12-15. [8]DEYST J P, SOUNDERS T M, SOLOMON O M. Bounds on least-squares four-parameter sine-fit errors due toharmonic distortion and noise[J]. IEEE Transactions on Instrumentation & Measurement, 1995, 44(3):637-642. [9]胡锦,彭诗瑶,张浩,等. 基于压力传感器的高精度血压计系统设计[J].传感器与微系统,2014,33(3):110-113. [10]马俊,陈学煌. 一种混合滤波算法在电子自旋共振仪中的应用[J]. 电子测量技术,2007, 30(5):185-187. [11]葛小凤,陈亚军. 锁相放大器对微弱信号的检测研究[J]. 信息技术,2016(22):97-100. [12]杨志勇,周召发,黄先祥,等. 基于正弦波磁光调制的方位失调角精确测量方法[J]. 光学学报,2012, 32(10):1012001. [13]周春桂,许爱国,靳合力,等. 多普勒引信信号极值识别算法[J]. 中北大学学报(自然科学版),2013, 34(3):310-313. [14]JENQ Y C, CROSBY P B. Sine wave parameter estimation algorithm with application to waveform digitizer effective bits measurement [J].IEEE Transactions on Instrumentation & Measurement. 1988, 37(4):529-532. [15]贺光红,韩柯,王昊,等. 面向皮卫星的地球磁场测量系统设计[J]. 电子技术应用,2009,35(12):77-80. [16]张钧,柳健,彭复员. 采用MAD算法进行地形匹配的精度分析[J]. 华中理工大学学报,2000, 28(7):35-37. [17]丁晓慧,刘俊杰,邢强. 基于自适应局部均值的EMD方法及其在谐波检测中的应用[J]. 电力系统保护与控制,2017,45(14):17-25. [18]王敏,赵金宇,陈涛,等. 基于能量函数的极值中值滤波星图去噪算法[J]. 电子与信息学报,2017,39(6):1387-1393. [19]李阳, 张欣, 张涛, 等. 一种保留图像边缘的自适应中值滤波器算法[J]. 通信技术, 2015, 48(12): 1367-1371. [20]刘丹,张丕状,马春燕.一种精确判定多普勒信号极值点位置的方法[J]. 激光与光电子学进展,2015, 52:070401.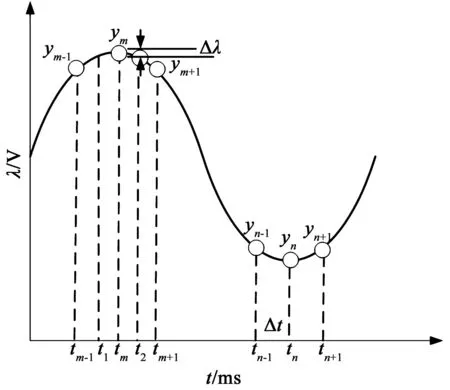
2.2 带干扰的信号极值检测滤波算法
3 实验结果



4 结论
猜你喜欢
新世纪智能(数学备考)(2021年10期)2021-12-21电气技术(2021年3期)2021-03-26河北理科教学研究(2020年3期)2021-01-04通信电源技术(2020年22期)2020-03-27中学数学杂志(2019年1期)2019-04-03广东技术师范大学学报(2016年5期)2016-08-22工业设计(2016年6期)2016-04-17空间控制技术与应用(2015年3期)2015-06-05遥测遥控(2015年2期)2015-04-23海军航空大学学报(2015年4期)2015-02-27