
茎叶类蔬菜生产技术装备应用与发展趋势分析
2018-06-13 06:01肖宏儒宋志禹夏先飞
中国蔬菜 2018年6期
肖宏儒 金 月 宋志禹 夏先飞 赵 映 梅 松 杨 光
(农业部南京农业机械化研究所,江苏南京 210014)
我国茎叶类蔬菜机械化生产水平低,存在机具功能单一、适应性差、生产效率低、作业质量差以及各环节机具不配套、与叶菜类蔬菜种植农艺不匹配等问题。本文结合我国国情,选取鸡毛菜、芦蒿、西芹等茎叶类蔬菜,研究其生长特性和种植农艺,总结分析国内茎叶类蔬菜生产技术与装备的研究现状,并以自主研制的整地播种、收获作业装备举例分析,提出茎叶类蔬菜生产机械化当前急需突破的关键技术和未来发展趋势,对今后研究开发茎叶类蔬菜生产技术装备指明方向。
我国是世界上蔬菜种类最多、种植面积最大的国家,2016年全国蔬菜播种面积2 232.83万hm2,总产量79 779.7万t(农业部,2018)。蔬菜生产是劳动密集型产业,劳动力成本占蔬菜生产总成本的65%,成为制约蔬菜产业发展的主要因素。因此,大力发展蔬菜生产机械化技术,研发通用、成套的蔬菜生产作业装备具有重要意义。
针对茎叶类蔬菜规模化生产要求、按生产作业环节分类,茎叶类蔬菜生产机械主要有整地机械、播种机械、田间管理机械和收获机械等。目前,我国蔬菜生产综合机械化水平约为20%(陈永生 等,2014),蔬菜播种和水肥施用存在严重的浪费,蔬菜定植还停留在半自动水平,蔬菜收获大多依靠人工。本文以长三角地区典型密植栽培速生叶菜—鸡毛菜,以及具有地方特色的茎叶类蔬菜—芦蒿、西芹为例,分析蔬菜生产各环节机械化的研究现状、实施效果及存在问题。
1 茎叶类蔬菜机械化生产案例分析
近年来,在蔬菜机械化生产过程中,耕整地和播种技术水平大幅度提高,但仍存在粘重土壤条件下碎土性差、导种管易堵塞的现象,装备的可靠性差。而且现有的耕整地和播种机具多适用于平坦田块,斜陡坡和丘陵地区很难推广应用。此外,茎叶类蔬菜收获是劳动强度最大的作业环节,目前主要依靠人工采收,机械化收获需求迫切。针对上述问题,本文以果蔬茶收获创新团队自主研制的茎叶类蔬菜生产作业装备为案例,阐述技术与装备研发的重点和难点,提出适宜茎叶类蔬菜机械化生产的种植农艺和机具配套要求,为推动茎叶类蔬菜产业发展和实现生产的全程机械化提供有力保障。
1.1 整地播种机应用案例
1.1.1 叶菜整地播种复式作业机 鸡毛菜种子小、播种量大,最适宜的机械化种植方式是条播。目前,国内缺少集整地、做畦、播种、压实多项功能于一体的茎叶类蔬菜联合作业装备,单一整地和播种装备存在粘重土壤条件下耕作碎土性差、播种均匀性差和排种管易堵塞等问题。
针对上述问题,果蔬茶收获创新团队研制出集旋耕、开沟、做畦、播种、平整、镇压功能于一体的复式作业机具,如图1所示。该机具采用多种形式的刀片复合耕作的方式,碎土性和耕深一致性显著提高;设计模块化装拆播种装置,作业时可根据种植需要调节播种行数和行距;创新提出开沟或压槽播种的方法,将种子均匀播到沟中,既能精确控制播种深度,又可以提高播种的均匀性。

图1 叶菜整地播种复式作业机田间作业情况
此外,该机具设计的作业参数(表1)与收获机配套,有效解决了耕种收环节机具不配套的问题,真正意义上实现鸡毛菜从整地、播种到收获的全程机械化。田间试验结果表明,该机具作业效率达0.12 hm2·h-1,而人工作业每公顷每天预计需45~60人完成,机械化整地播种效率是人工的40倍以上,且采用机械化作业的畦面平整度和细碎度好,畦面坚实度可以满足机械化收获要求。

表1 叶菜整地播种复式作业机的主要技术参数
1.1.2 西芹种植起垄、压实、覆膜、打孔、播种、盖沙一体机 西芹种子小、出苗弱,因此播种量和栽培密度大。传统的种植方式是人工穴播后覆水洗沙盖种,此种植方法不仅费工费时、效率低,而且播种的均匀性差、播种量大,种子浪费严重。采用机械作业需实现打膜孔、播种和盖沙等一系列工序动作(肖宏儒 等,2015a)。
为解决西芹播种难题,果蔬茶收获创新团队研制出西芹种植起垄、压实、覆膜、打孔、播种、盖沙一体机(图2),采用气压打孔和旋转划孔复合打孔的原理,解决膜上打孔难题;采用气压排种技术辅助前期播种盒自动排种技术,解决西芹种粒过轻无法精准落位和及时排种的问题;采用主动排沙与限位盖沙同步技术,解决盖沙量过大、落位不准和湿沙流动性差的问题。使用该机具每667 m2可节约成本385元。

图2 西芹种植起垄、压实、覆膜、打孔、播种、盖沙一体机田间作业情况
1.2 收获机应用案例
在茎叶类蔬菜的生产过程中,收获作为劳动强度最大的作业环节,约占整个生产作业量的40%(卞丽娜 等,2015)。随着农村劳动力日益短缺和雇佣成本逐年增加,对茎叶类蔬菜收获装备的需求也愈加迫切(王俊 等,2014;张瑞华 等,2015)。茎叶类蔬菜根据收集方式不同,主要分为有序收获和无序收获(糜南宏 等,2014),国内的无序收获技术与装备研究起步较早,技术也相对成熟。但由于茎叶脆嫩易损伤,且缺少规范的种植农艺,绝大多数的无序收获机都存在损伤高和损失大的问题,实际能够应用和推广的机具很少。
1.2.1 4GCD-600型叶菜收获机 果蔬茶收获创新团队研制的4GCD-600型叶菜收获机(肖宏儒 等,2015b)适用于茎叶高度在10~25 cm范围内的叶菜无序收获,可一次性完成叶菜的切割、输送和收集作业,效率高;作业过程中无需对行收获,操作简单轻便;整机动力采用电驱动,噪音小、无污染,在零散田块和设施农业中应用广泛(图3、表2)。

图3 4GCD-600型叶菜收获机田间作业情况

表2 4GCD-600型叶菜收获机的主要技术参数
该机具可与叶菜整地播种复式作业机配套使用,从畦的一侧采用蛇形路线收获作业,1.2 m宽的畦刚好分2次收完。田间试验结果表明,该机具收获鸡毛菜的叶菜完整率>92%,漏割率<2%,漏拾率<3%,平均生产率可达0.08 hm2·h-1,较人工收获每667 m2节约成本200元以上。
1.2.2 4GCY-1200型手扶式叶菜有序收获机 根据我国消费者的购买习惯,损伤小且整齐有序的茎叶类蔬菜销售价格更高,经济效益好。我国茎叶类蔬菜种类多、差异大,采用机械化收获普遍存在损伤高、效率低、归齐难的问题。在茎叶类蔬菜有序收获技术与装备研究方面,果蔬茶收获创新团队经过多年努力,先后尝试了10余种有序收获方案,成功研制出4GCY-1200型手扶式叶菜有序收获机(肖宏儒 等,2017),采用低损切割与有序输送收集协同收获技术,利用柔性输送导向机构实现茎叶类蔬菜的侧向有序堆放,使叶菜收集整齐不乱,适用于茎叶高度15~20 cm的叶菜有序收获(图4、表3)。
该机具对畦面的平整度和土壤坚实度要求较高,畦面不平、石土块大会导致割茬不齐、切土等问题;畦面疏松易出现轮胎下陷打滑现象,切割高度也受影响。田间试验结果表明,传统的人工整地播种难以满足机械化收获的高要求,采用叶菜整地播种复式作业机种植的叶菜,机械化收获效果好;该机具已通过权威部门的检测,收获叶菜完整率≥94%,漏割率<2%,漏拾率<2%,平均生产率可达0.09 hm2·h-1,传统人工收获1 hm2叶菜需要90~105人用时4 h完成,采用机械化收获可大大提高作业效率,是人工收获效率的30倍以上。

图4 4GCY-1200型手扶式叶菜有序收获机田间作业情况
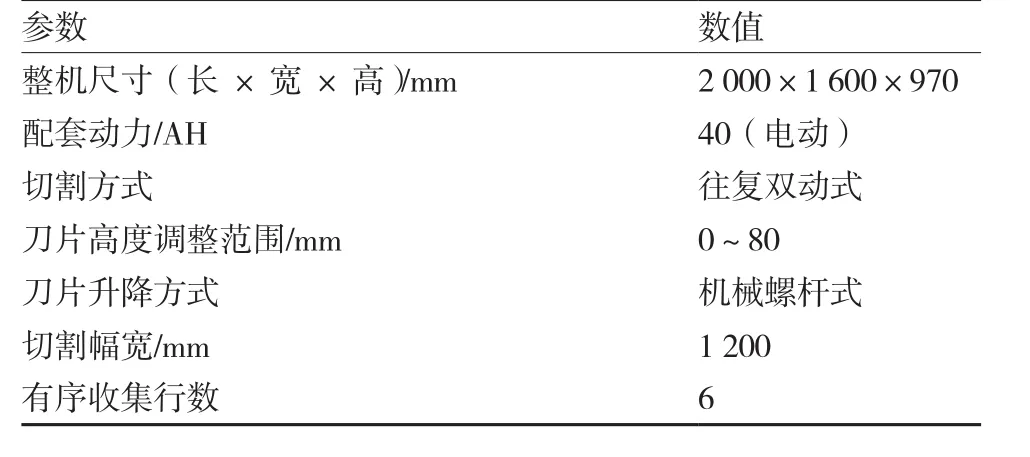
表3 4GCY-1200型手扶式叶菜有序收获机的主要技术参数
1.2.3 芦蒿有序收获机 芦蒿是长三角地区的典型、特色经济作物,也是茎叶类蔬菜的主要代表作物。芦蒿的根状茎稍粗,呈直立或斜向上,直径4~10 mm,有匍匐地下茎。多生于低海拔地区的河湖岸边与沼泽地带,因此多依靠人工方式进行收获。成熟的芦蒿株高60~70 cm,茎秆直径1~2 cm,主要食用鲜嫩茎秆,农艺要求切割高度3~5 cm。
果蔬茶收获创新团队研制的芦蒿有序收获机(肖宏儒 等,2014)如图5所示,采用芦蒿导向架与扶蒿板机构,收获完成后通过旋转芦蒿导向架可以将收集箱体取下,更换空箱体继续作业,实现了芦蒿的有序机械化收获。
1.2.4 4CCZ-1200型自走式菜茶收获机 4CCZ-1200型自走式菜茶收获机是果蔬茶收获创新团队研制的一种适用于菜园、茶园的通用收获机 (图6),主要由门形履带底盘、往复式切割装置、拨禾装置、带式输送装置、收集装置和操控系统等组成,可一次性完成叶菜或茶叶的切割、输送和收集作业。
该机具采用跨行履带式行走系统、输送带内嵌方式,有效优化整机结构、缩短尺寸。收获幅宽1 200 mm,履带中心距1 500 mm,切割高度调整范围0~800 mm。作业过程中,履带跨于菜畦间或茶行间行走,具有不损伤菜畦或茶棚的优点,露地收获效率高,设施中同样适用,而且可拓展用于收获多茬茎叶类蔬菜(如蕹菜)、枸杞菜、薰衣草等。

图5 芦蒿有序收获机田间作业情况

图6 4CCZ-1200型自走式菜茶收获机田间作业情况
2 适宜机械化生产的茎叶类蔬菜栽培模式分析
通过深入调研茎叶类蔬菜的栽培农艺,以及对研制的整地播种和收获样机进行田间试验,发现种植制度不规范,如叶菜做畦的宽度与机械切割幅宽不一致;收获前的耕种粗放,如畦面平整度和土壤细碎度差等,对收获装备作业性能有极大的影响。因此,本文结合茎叶类蔬菜的生长特性和栽培农艺技术,从生产机械化的角度对茎叶类蔬菜栽培模式进行分析。
以鸡毛菜为例。鸡毛菜是十字花科普通白菜(小白菜)的幼苗,属于典型密植栽培速生叶菜,生长周期短,夏季高温时一般为20~25天,冬季30天左右,多采用大棚内做畦条播或撒播的种植方式,周年供应。鸡毛菜具有种子小、播种量大的特点,且茎叶十分鲜嫩易损,因此一般先采用小型手扶式旋耕机整地,再由人工将沟畦做好、畦面拉平,最后人工撒播或用手扶式播种机条播的种植方式,收获也多以人工为主。目前,各地种植鸡毛菜的幅宽尚未统一,整地做畦的精细化水平参差不齐,播种均匀性和株行距差异也较大,严重制约了生产机械化水平的提高。
由于茎叶类蔬菜种类繁多、品种差异大,故机械化装备研究起步晚,综合机械化水平较低,因此缺少相关标准参照。果蔬茶收获创新团队参照目前其他作物生产机械化相关标准,结合多年的研发经验,提出鸡毛菜整地播种机应达到如下要求:做宽矮畦、条播密植,播种行距10 cm,播种深度0.5 cm,每667 m2用种量1.5~2.0 kg;畦高合格率≥80%,畦面不平整度≤2 cm,畦体直线度≤5 cm,作业后畦形完整、畦沟回土少。鸡毛菜收获机应满足如下性能指标:收获叶菜完整率≥85%,漏割率≤3%,拣拾率≥95%。
3 茎叶类蔬菜生产机械化的发展趋势
3.1 茎叶类蔬菜生产实现全程机械化
近年来,茎叶类蔬菜机械化逐渐由早期的耕翻机械向播种、移栽、水肥药管理、采收等方面延伸,覆盖作业全程。目前,茎叶类蔬菜生产耕整地机械已相对成熟,育苗移栽取得重大突破,灌溉和植保技术突飞猛进,但是收获环节仍以人工采收为主,茎叶类蔬菜生产机械化发展严重失衡。因此,必须系统地研究蔬菜生产各环节作业机具,建立茎叶类蔬菜生产技术体系,实现茎叶类蔬菜生产全程机械化。
3.2 技术多元化与装备的多功能性
近年来,茎叶类蔬菜生产机械的设计研发开始集成机、电、液、气、控技术,发展成为综合度较高的复杂机械装备,对操作者的专业水平要求有所提高。此外,机具的功能大大增加,集多种作业功能于一体的复式作业装备更多应用在茎叶类蔬菜生产中,具有省时、高效、节本等特点,倍受菜农青睐。
3.3 装备的通用性有待提高
我国茎叶类蔬菜种类繁多,种粒特性、生长特性和种植农艺多样,如果研制的生产作业装备通用性差,必然会增加蔬菜生产经营的成本,大多数农户难以接收,制约着蔬菜生产机械的推广。因此在考虑成本因素时,就要提高茎叶类蔬菜生产机械的通用性,开发针对某大类叶类蔬菜种植和收获的机型,或通过更换部分零部件,或通过调整工作参数来实现(姚会玲和徐丽明,2007)。此外,随着设施农业的快速发展,设施种植茎叶类蔬菜的面积逐年增加,开发的生产作业装备要尽可能紧凑、轻便,兼顾设施结构与尺寸。
3.4 智能化水平进一步提升
随着茎叶类蔬菜机械化需求层次的进一步提升,智能化控制技术在茎叶类蔬菜生产机械化发展中的应用将更加广泛。目前,欧美、日韩等国研发的蔬菜种植和收获机具大多集成了驾驶导航定位系统、故障诊断与报警系统、精密播种、割台提升与行走仿形等智能化控制系统,大大减少了种子的浪费,提升了收获蔬菜的品相,降低了驾驶员的作业难度和强度。
我国茎叶类蔬菜生产作业装备的智能化程度低,多数还是机械化、半自动化装备,常见的控制如在收获机的割台上应用自动提升控制系统。目前,我国农机装备上的智能控制系统还处于试验研究阶段,技术还需完善,离推广应用还有一定距离。此外,用于收获过程的蔬菜数量、质量信息的采集、智能化品质识别和在线筛选等,也将是未来发展方向之一。
3.5 加强农业机械装备和种植农艺的紧密融合
在现代农业发展中,农业机械化的实现越来越离不开农艺的支持,农机与农艺相辅相成,共同服务于农业生产的综合效益。因此,在研发茎叶类蔬菜生产作业装备前必须要深入调研茎叶类蔬菜的生长特性和种植农艺,提出适宜机械化生产的栽培模式和各环节机具的配套要求。研发与农艺相融合的茎叶类蔬菜生产机械,规范种植农艺,加强农机、农艺融合是茎叶类蔬菜实现全程机械化的关键。
4 结论与讨论
随着农村劳动力的不断减少和茎叶类蔬菜需求量的日益增多,茎叶类蔬菜生产机械化是今后重要的研究和发展方向。我国茎叶类蔬菜生产机械化研究起步晚,综合机械化水平较低,蔬菜生产机械需要具有较高的可靠性和经济性,因此通用性、多功能性和智能化是研究的重点。茎叶类蔬菜生产技术与装备的研发不仅要借鉴国内外相关机型的成功经验,还要总结机械化生产的共性关键技术,装备设计研发融入机、电、液、气、控多项技术,规范茎叶类蔬菜的种植模式和区域种植规划,将农机与农艺有效融合,研制的生产作业装备才能更加具有应用和推广价值,对实现茎叶类蔬菜生产全程机械化具有重要意义。
卞丽娜,李继伟,丁馨明.2015.叶菜类蔬菜机械化收获技术及研究.农业装备技术,41(2):22-24.
陈永生,胡桧,肖体琼,崔思远,杨雅婷,管春松.2014.我国蔬菜生产机械化现状及发展对策.中国蔬菜,(10):1-5.
糜南宏,赵映,秦广明,金月.2014.蔬菜全程机械化研究现状与对策.中国农机化学报,35(3):66-69.
农业部.2018.2016年全国各地蔬菜、西瓜、甜瓜、草莓、马铃薯播种面积和产量.中国蔬菜,(1):18.
肖宏儒,韩余,宋志禹,丁文芹,梅松.2014.一种芦蒿收割机.中国:201410514808.1.
肖宏儒,梅松,宋志禹,丁文芹,韩余,赵映,金月.2015a.一种挂接式多功能西芹种植一体机.中国:201510787869.X.
肖宏儒,金月,李坤,丁文芹,张最,宋志禹,梅松,韩余,赵映.2015b.一种轻简型叶菜蔬菜收获机.中国:201520590556.0.
肖宏儒,金月,杨光,宋志禹,丁文芹,夏先飞,梅松,赵映,韩余.2017.一种叶菜蔬菜有序、无序通用收获机.中国:201720176544.2.
姚会玲,徐丽明.2007.结球叶菜收获机械研究现状及发展对策.农机化研究,(4):185-188.
王俊,杜冬冬,胡金冰,朱建锡.2014.蔬菜机械化收获技术及其发展.农业机械学报,45(2):81-87.
张瑞华,施俊侠,张日红,梁坚,胡杰文.2015.小型绿叶类蔬菜收获机的收获方案及切割装置设计.农业科技与装备,(10):11-13,16.
猜你喜欢
南方农机(2022年20期)2022-10-20
老友(2022年4期)2022-05-18
农业开发与装备(2021年2期)2021-12-27
四川农业与农机(2021年4期)2021-12-05
今日农业(2020年23期)2020-12-31
电脑迷(2020年7期)2020-08-07
中国蔬菜(2019年1期)2019-01-21
食品安全导刊(2018年21期)2018-01-16
中国农村科技(2017年4期)2017-05-03
百姓生活(2017年4期)2017-04-20
