
广角切伦科夫望远镜子镜支撑调节系统设计
2018-11-12 08:05李为民李嘉宾张建军冯少辉
机械设计与制造 2018年11期
李为民,李嘉宾,张建军,冯少辉
1 引言
拼接镜面技术的发展,使天文望远镜的口径突破了镜坯材料的限制。该技术通过将多个小镜面拼接成一个大口径镜面,解决了大型光学镜面的浇铸加工难度大,镜面易变形的问题[1]。在高海拔宇宙线观测站LHAASO项目的广角大气荧光切伦科夫光探测器阵列(WFCTA),由十二台广角切伦科夫望远镜[2-3]组成。该望远镜的镜面面积约为6m2,为节省成本,每台望远镜都采用了拼接镜面技术。与传统的望远镜相比,采用拼接技术的望远镜的子镜支撑调节有了新的技术要求和难度[4],实现稳定支撑和精密调节的需要使其必须同时满足大刚度和高精度的要求。
研究以满足广角切伦科夫望远镜子镜支撑调节要求为目标,选择合适的机构,对机构进行数学建模与位置反解;通过仿真机构的输入输出关系,设计出该机构调节过程近似解耦的安装布置方式和调节方法;然后进行镜片共焦实验,验证该支撑调节系统是否满足要求。
2 子镜支撑调节系统的要求
广角切伦科夫望远镜拟采用单球面反射系统的设计方案,反射主镜由20块对角长为600mm的正六边形球面子镜及5块相应的半子镜拼接而成,镜面布置,如图1所示。
望远镜的子镜通过支撑调节机构连接在一定曲率的支撑架上,镜面曲率半径为5800mm,各镜片之间边缘间距为(5~12)mm,反射镜及三角镜架质量约25kg。支撑机构在支撑架上要稳定支撑,角度调整需精确,以保证每块子镜片的焦点能够方便调节到指定的光电倍增管(PMT)上;可将子镜片单独安全调整至任意位置,调节过程中各镜片不能发生碰撞干涉[5]。电气控制调节过程系统复杂,成本较高,而拼接镜安装调好后各镜片位置相对固定,不需要实时调节,所以采用手动调节的方式。支撑架是有一定曲率的10mm厚的钢板,为方便手动调节,要求调节时人的位置和子镜支撑机构位置在钢板的两侧。
结合实际需求进行简要计算,得出广角切伦科夫望远镜对子镜支撑调节机构的技术要求如下:
调整自由度:2自由度转动
角度调整精度:±0.2°
调节方式:手动调节
3 机构选择与运动分析
3.1 支撑调节机构选择
并联机构凭借结构刚度大、承载能力高、稳定性强、动力响应快、结构紧凑等优点,已成为机构学的一个重要研究分支[6]。针对要求进行分析后采用2-PSS/U二自由度并联机构作为子镜的支撑调节机构,如图2(a)所示。该机构具有精度高,刚度好,稳定性强的特点,将镜片固连在机构动平台上,支撑架作为机构静平台,驱动二个移动副可以实现动平台的二个转动自由度,并且在调节过程中控制端和子镜支撑结构分别位于支撑架的两侧,手动调节方便。为增强机构刚度,设计一条辅助支链,机构改进为3-PSS/U二自由度转动机构,其机构简图,如图2(b)所示。
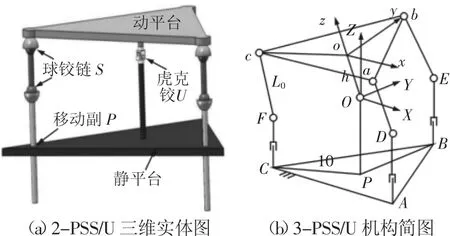
图2 2-PSS/U三维实体图与3-PSS/U机构简图Fig.2 3D Model of the 2-PSS/U and Schematic Diagram of 3-PSS/U Parallel Mechanism
3-PSS/U机构由动平台,静平台以及连接动,静平台的3条PSS支链和1条U支链组成。PSS支链一端通过球铰链S与动平台相连,另一端通过移动副P与静平台相连,且移动副的导路方向正交于静平台所在平面。此外,动、静平台通过虎克铰U直接相连接。调节过程中,辅助支链松开,角度调好后,拉紧支链,从而提高机构刚度。移动副采用螺旋传动的方式,要求子镜模块的调整精度为±0.2°,计算得2点螺旋传动机构的直线位移精度大约需要0.3mm,而这种精度的螺旋传动不难实现。
3.2 机构坐标系建立
按照图2(b)所示在动平台几何中心点o和虎克铰中心点O分别建立固接于动、静平台的动坐标系o-xyz和静坐标系OXYZ。设动、静平台分别为以点o和点P为几何中心的正三角形,Oo、OP分别与动、静平台所在平面正交固接。动坐标系中x轴平行于ca,z轴垂直于动平台所在平面,且垂直向上,y轴满足右手定则。类似地,静坐标系中的X轴平行于CA,Z轴垂直于静平台所在平面,且垂直向上,Y轴满足右手定则。虎克铰其中一个转轴安装后朝向固定,设此转轴为定轴,另一个转轴设为动轴,安装时将虎克铰的定轴朝向定坐标系的X轴,动轴平行于动坐标系的y轴。h为动静坐标系原点的距离,l0为正三角形中点到各顶点的距离,L0是各支链上两球副之间的距离。cFC是辅助的PSS支链,只起增大机构刚度的作用,不参与调节,以下只分析2-PSS/U机构。
3.3 机构自由度计算
2-PSS/U机构中移动副,连杆,球副构成PSS链,约束轴为中间的U链,支链中两球副之间的连杆可绕其自身的轴线旋转,故该机构的局部自由度为2,根据Kutzbach-Grübler公式[7],得到机构的自由度数:

式中:n—构件数;g—运动副数;f—第i个运动副具有的自由度数;k—局部自由度数。
该机构中的虎克铰限制了机构的移动和一个方向转动的自由度,所以机构具有绕二个坐标轴转动的自由度。
3.4 机构建模与位置反解
位置反解是指已知动平台绕静平台坐标轴的转动角度,反求机构中各驱动副的驱动量,在本机构中即为求解移动副将各支链中间球铰中心驱动到的坐标位置。
当负荷功率分别为2 MVA、4 MVA、6 MVA,功率因数为0.85,XC=0时,串补装置处节点电压分别为9.57 kV、8.89 kV、8.19 kV,若加入补偿度k=2.25的补偿电容时,补偿点电压分别提升1.272 kV、1.591 kV、1.668 kV。结果如图4所示:容量与电流的平方成正比,而串联电容器补偿的电压与线路电流成正比。因此,当线路容量增大时,电流增大,补偿的电压也随之增大。这就是串补的负荷自适应特性,也是其他无功补偿均不具备的特性。
采用绕固定轴X-Y-Z(α,β,γ)旋转的方式表示动平台的姿态[8]。按照图2建立的坐标系,机构动平台相对于静平台的旋转矩阵为:
式中:cα=cosα;sα=sinα;A—静坐标系;B—动坐标系。
根据齐次变换公式A可以将点 a,b,D,E 在静坐标系中的坐标表示出来,由2条支链PSS中两个球副S之间的距离相等且长度固定为L0,根据两点间距离公式得到方程组。

方程组中有二个未知数分别是点D,E在静坐标系中沿Z方向的坐标,也是螺旋驱动需要将球铰中心驱动到的位置。此方程组为二元二次线性方程,求得方程组中二个未知数解的表达式为:

由上式求得机构的位置反解,共4组。根据机构的特点和球面副转动角度的限制,可以得到确定的解。
4 机构输入输出关系的运动仿真
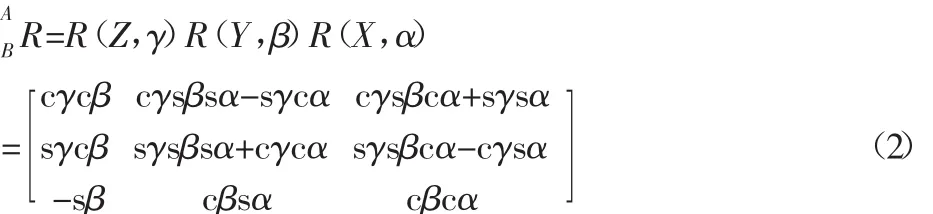
为考察机构运动特征,本节对机构的输入输出关系进行MATLAB仿真。该机构中的约束链是虎克铰,限制了机构绕Z轴的转动,所以在仿真过程中动平台绕Z轴的转动角度为0。按照图2建立的坐标系,设α是动平台绕X轴的转动角度,β是动平台绕Y轴的转动角度。y1,y2分别为球面副D,E几何中心的Z坐标。转动角度α,β为机构输出,y1,y2为机构输入,各输入输出关系仿真结果,如图3所示。其中l0=215mm;L0=40mm;h=20mm。
图3 机构输入输出关系仿真Fig.3 Simulation Analysis of Relation Between the Structure Input and Output
通过以上仿真获得机构输入与输出的关系,为机构的安装调节提供依据。由图看出机构在调节时,移动副的驱动量与动平台的转动角度是近似线性的,而且当α角度固定时,β角度的调整几乎只与其中一条支链有关,说明该机构在小角度调节时是近似解耦并且调节过程是稳定渐变的。根据仿真出的机构特征,对机构近似解耦调节的布置方式进行设计,按照镜筒水平放置下进行分析,如图4所示。此时支撑调节系统侧向安装,让静平台上移动副B和定平台中心点P呈水平布置,则定坐标系的Y轴在水平面上,Z轴指向支撑架的曲率中心。镜片固连在机构动平台上,推动移动副B,动平台绕虎克铰定轴X和虎克铰动轴旋转,镜片焦点在水平和竖直方向移动。推动移动副A,动平台绕虎克铰的动轴旋转,另外支链bEB中杆bE会绕球副E摆动,导致动平台绕虎克铰定轴转动。虎克铰的动轴平行于动坐标系的y轴,其在动平台的角度调节范围以内基本水平,动平台绕虎克铰动轴转动,焦点水平方向的移动距离最多为:

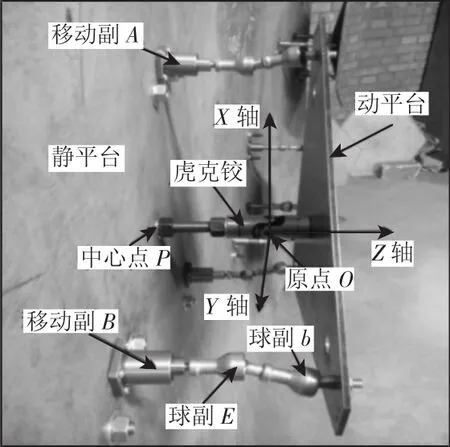
图4 支撑调节机构安装Fig.4 Installation of the Support Adjustment Segment
而在动平台的角度变化范围±2°内,因杆bE的摆动使镜片焦点水平移动的距离最多为:

两者之和为0.78mm,小于镜片焦点的位置调节精度,可以认为推动移动副A,焦点只有竖直位置发生改变。这种机构布置方式使得镜片焦点竖直位置的调节只对应机构的一个驱动,能够使镜片焦点的调节过程近似解耦。
5 镜片安装与共焦实验
5.1 镜片安装调节
镜筒水平放置情况下对镜片及支撑机构进行安装调节,镜片固连在机构动平台上,支撑架作为支撑调节机构静平台,接收光的装置是由多个光电倍增管(PMT)组成的矩形阵列,各镜片的焦点需要到达对应的光电倍增管(PMT)上。根据镜片焦点需要到达的目标位置计算出各镜片调节后需要的位姿,由以上仿真出的位姿与驱动之间的关系,求得所需位姿对应的镜片安装后驱动副的驱动量。按照计算出的驱动量和上节介绍的解耦调节布置方式安装机构后,由于建模和运动副间隙以及机械元件误差等原因,镜片焦点一般并没有在指定的位置,此时需要支撑机构对其进行调节。镜筒水平放置,调节过程中,首先推动移动副B,使得焦点位置与焦点目标位置竖直对齐,然后推动移动副A,调节焦点竖直位置,使得焦点位置与焦点目标位置重合。依次将所有镜片进行安装调节,直至所有镜片安装完毕。
5.2 共焦装调实验
为了验证该支撑调节机构的可行性,进行镜片共焦实验。实验没必要将所有镜片进行安装,如果能够成功安装三面镜片,并且通过调节机构使各镜面焦点聚焦到一点,就足够说明该支撑调节机构是可行的[9]。实验通过镜片聚焦作用形成光斑,调节支撑机构使光斑移动,观察光斑重合程度验证各镜片焦点是否聚焦到一点,要求光斑重合后的直径不大于20mm。实验步骤如下:(1)将光源射出的光束射到纸板上,纸板将光进行漫反射,漫反射的一部分平行光照在镜片上,通过镜片的聚焦作用形成光斑。(2)把接收板放到镜片焦点附近,使光斑映射到接收板上。(3)按照上节叙述的调节方式进行调节,将光斑调到目标位置。
实验中三面镜片的支撑机构都按照动平台绕X轴和Y轴各转动2°计算出的结果进行安装。第一、二面镜子安装后光斑聚焦到刻度板上,如图5(a)所示。将第一面镜子光斑设为目标位置。调节第二面镜子的支撑机构,推动移动副B,使得光斑位置与目标位置竖直对齐,如图5(b)所示。再推动移动副A,使两光斑重合,如图5(c)所示。同样方法调节支撑机构使得第三面镜子的光斑与第一、二面镜子的光斑重合,调节过程,如图6所示。
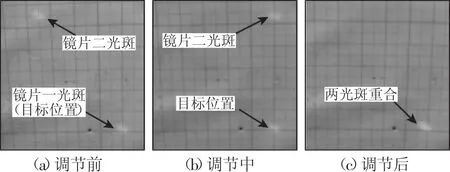
图5 第一、二面镜子光斑位置Fig.5 The Light Spot Position of the First and the Second Mirror
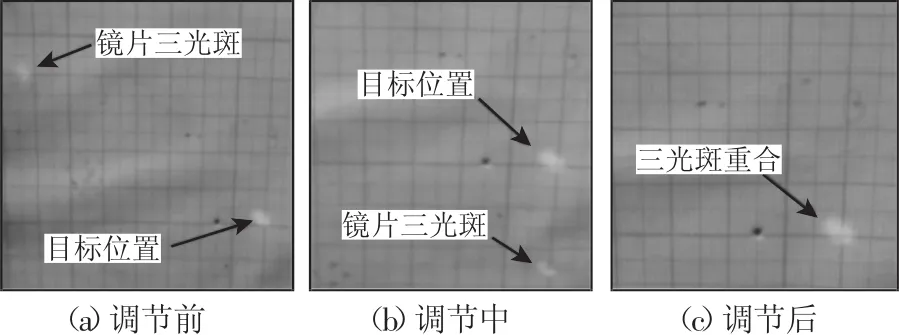
图6 第三面镜子光斑位置Fig.6 The Light Spot Position of the Third Mirror
5.3 共焦装调实验结果分析
根据建模计算出来的输入数据进行安装,各镜片之间没有发生干涉,并且安装后光斑位置在目标位置附近。手动调节后光斑位置能够到达目标位置,调节过程近似解耦,调节一面镜片所需要的时间大约为两分钟。使用该支撑调节机构进行调节,光斑重合直径大约是5mm,小于20mm。实验说明此机构调节简单方便,精度较高,满足实验要求。
6 结论
针对广角切伦科夫望远镜的镜片支撑调节要求,分析设计了一种大刚度带有冗余支链的拼接子镜支撑调节系统和调节方法。对支撑机构进行了位置反解和输入输出关系仿真,设计了一种通过合理布置机构使调节过程近似解耦的方式。通过共焦实验证明设计的支撑调节系统具有可行性,调节过程简单方便,精度较高,满足实验对拼接主镜的技术要求。该支撑调节系统造价较低,节省了项目成本,推动了LHAASO项目的进展,对以后的拼接镜支撑调节系统具有重要的参考价值。
猜你喜欢
小资CHIC!ELEGANCE(2022年1期)2022-01-11
阅读(高年级)(2019年9期)2019-11-15
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
南方周末(2018-03-08)2018-03-08
科学中国人(2017年22期)2018-01-02
摄影之友(2016年8期)2016-05-14
中国医疗美容(2015年1期)2015-07-12
北京航空航天大学学报(2014年1期)2014-12-19
中国机械工程(2012年15期)2012-07-25
