一种由分立导引头集成构建的复合末制导系统*
2019-07-20 06:44王学伟
火力与指挥控制 2019年6期
王学伟
(潍坊科技学院,山东 潍坊 262700)
0 引言
高技术条件下的现代海战中,反舰导弹面临的作战环境越来越复杂,不仅舰载拦截武器迅速发展,构成了对反舰导弹的层层拦截,以硬杀伤手段来削弱反舰导弹的突防能力,而且各种有源干扰、无源干扰、隐身技术以及电子诱饵的使用进一步削弱了反舰导弹的突防能力[1]。因此,随着战场环境的日益复杂和水面舰艇综合防护能力的提高,单一体制的制导方式已难以适应日益复杂的战场环境[2]。发展多模复合导引头,提高目标选择判别能力、抗干扰能力和突防能力是反舰导弹的必然趋势[3]。
文献[4]针对单一制导模式抗干扰能力弱的缺点,对主动雷达/红外复合制导在典型干扰情况下的数据融合抗干扰性能进行了仿真。文献[5]提出了一种雷达与红外的融合跟踪方法,运用卡尔曼粒子滤波算法对目标状态进行初估计,将雷达和红外得到的目标状态估计采用协方差加权融合得到目标最终的状态估计。文献[6]研究了激光/红外复合导引头的抗干扰策略,结合激光获取的目标距离信息,提出了复合抗干扰策略。文献[7]针对复合制导中不同测量系统时钟不匹配将会产生较大误差的问题,使用线性插值时间校准方法来完成时间校准,并通过仿真分析了时钟匹配的影响。文献[8]分析了主动雷达/红外成像复合制导的抗干扰机理,讨论了改进型复合诱饵干扰方式。文献[9]构建了雷达/红外复合导引头抗干扰指标体系,并对指标因子进行了建模分析。文献[10]提出了一种基于单模导引头实现复合制导对抗试验的方案,并分析了时空配准、数据关联和融合检测识别等关键技术的解决方法。
主动雷达导引头和红外成像导引头提供的信息具有互补性,两者复合能够有效提高对目标的检测、判别和跟踪能力[11]。本文采用分立的主动雷达导引头和红外成像导引头构建复合制导处理系统,模拟反舰导弹主动雷达/红外成像复合导引头对舰船目标的探测跟踪过程,主动雷达导引头提供的目标信息包括:距离、速度、方位、战斗指令,红外成像导引头提供的目标信息包括:方位角、俯仰角。复合制导处理系统接收主动雷达导引头和红外成像导引头输出的目标信息,经过综合处理,得出对目标的复合判断。本文采用分立导引头集成构建复合目标探测系统,涉及如下关键技术:空间对准、数据关联[12]、目标判别。
1 空间对准
对某型主动雷达导引头和某型红外成像导引头进行空间对准,以减小系统误差。安装原则为主动雷达导引头和红外成像导引头输出的方位角偏差最小,参照图1所示。
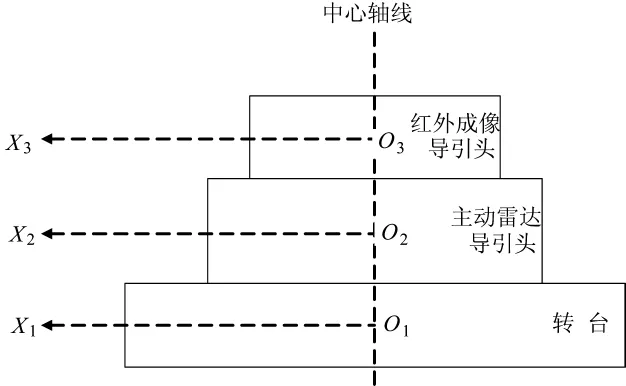
图1 主动雷达导引头和红外成像导引头空间对准示意图
1)采用红外成像导引头在上,主动雷达导引头在下的布局,固定在同一转台上;
2)保证转台的中心O1、主动雷达导引头的中心O2、红外成像导引头的中心O3在同一铅垂线上;
3)保证在零位状态下,转台的零位轴O1X1、主动雷达导引头的电轴O2X2、红外成像导引头的光轴O3X3平行,且在同一铅垂面上;
4)保证转台固定台面的水平度以及转台放置平面的水平度。
安装完成后,在外场选定一个固定目标作为标定参照物进行标定,主动雷达导引头和红外成像导引头对标定参照物输出的方位角偏差δ作为系统误差。
2 数据关联
末制导复合的前提是两个导引头探测到的是同一个目标,如果不是同一目标,则根本无从谈及信息互补,更谈不到对目标的优化探测。数据关联的研究内容是保证两个导引头探测到的是同一个目标,是复合制导信息处理的基础。
数据关联的实质是保证两个导引头探测到的是同一目标。为完成正确的数据关联,需要完成如下两部分内容的工作:
对于潜在目标,主动雷达导引头和红外成像导引头对其进行探测,都要输出目标的方位角。两个导引头对目标的多次测量构成了测量数据集合,这些测量数据是服从正态分布的。设主动雷达导引头对目标的测量数据集的标准差为δ1,红外成像导引头对目标的测量数据集的标准差为δ2。若主动雷达导引头和红外成像导引头探测到的是同一目标,考虑到空间对准时主动雷达导引头和红外成像导引头之间的系统误差,则为了减小虚警率,取连续3次测量值进行判别,若连续3次测量值都满足小于或等于3(δ1+δ2)+δ,这样就以 0.997 3 的概率保证了主动雷达导引头和红外成像导引头探测到的是同一目标。
对于潜在目标,设主动雷达导引头对其探测,输出的方位角为ψ1,标准差为δ1;红外成像导引头对其探测,输出的方位角为ψ2,其标准差为δ2。对于连续的3组测量数据,若

则按概率论的3δ准则,上述两导引头输出的目标方位角之间的差值小于或等于3(δ1+δ2)+δ的概率为0.997 3,则判定主动雷达导引头和红外成像导引头探测到的是同一目标。其中δ为空间对准时主动雷达导引头和红外成像导引头对标定参照物输出的系统误差。
若上式不成立,则不是同一目标,这时处理红外成像导引头输出的红外图像进行目标判别。通过图像处理,有两种情况:
1)红外成像导引头跟踪的是目标:则主动雷达导引头跟踪的是非目标,发出重置指令给主动雷达导引头,主动雷达导引头接收指令,回到初始位置(即与转台零位轴重合),重新进行搜索,捕获目标后,再和红外成像导引头进行数据关联。
2)红外成像导引头跟踪的是非目标:发出报警指令给红外成像导引头,红外成像导引头接收指令,回到初始位置(即与转台零位轴重合),重新进行搜索,捕获目标后,再和主动雷达导引头进行数据关联。
3 目标判别
本方法综合利用分立的主动雷达导引头和红外成像导引头提供的目标信息进行目标判别,主动雷达导引头提供高精度的目标距离信息,红外成像导引头提供丰富的目标图像信息,将两者复合处理,能够提高判别置信度,降低虚警率。核心思想是:在由主动雷达导引头测得的给定距离下,由红外成像导引头输出的目标图像的像素个数是固定的,并且遵循距离越远,像素数越少,距离越近,像素数越多的规律。同时,在给定距离下,目标几何尺寸越大,目标图像像素数越多,目标几何尺寸越小,目标图像像素数越少。这样,对于特定的目标,通过检验距离和像素数的关系,可以对目标进行判别。
方法主要包括如下内容:
1)取合作目标舰船进行标定,建立合作目标舰船图像像素数与距离关系数据库。
标定的目的是建立数据库,数据库包含合作目标舰船在红外成像导引头视场一定时,不同距离(由主动雷达导引头测得)和不同角度(合作目标舰船的运动方向与红外成像导引头视线方向的夹角)下的图像像素数(由红外成像导引头输出的红外图像处理得出)。
选取己方舰船作为合作目标,合作目标舰船的几何尺寸(长、宽、高)是已知的。标定时,主动雷达导引头和红外成像导引头放置在同一转台上,转台的位置固定。合作目标舰船由近及远运动。主动雷达导引头跟踪目标并锁定,红外成像导引头跟踪目标并锁定。为减小标定的工作量,合作目标舰船与导引头的距离选择 1 km、2 km、3 km、4 km、5 km、10 km、15 km、20 km 8个量程,上述距离由主动雷达导引头测得。在每一个距离点上,合作目标舰船的运动方向(从船尾到船头的舰船纵轴方向)与红外成像导引头视线方向的夹角有两个:0°和90°,即记录两种合作目标舰船的运动状态。记录每个距离点和合作目标舰船运动状态下的红外图像并进行存储,经图像处理运算得到合作目标舰船图像像素数,并填充到数据库中,如表1所示。数据库的格式如下:
合作目标舰船尺寸(m):长×宽×高
红外成像导引头视场:方位度数×俯仰度数
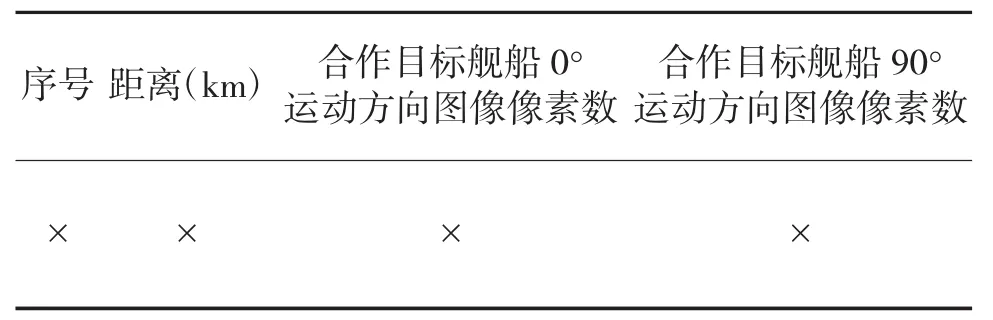
表1 合作目标舰船图像像素数与距离关系数据库
填好上表后,就形成了合作目标舰船图像像素数与距离关系数据库。
当距离不等于上述给定距离时,采用插值方法求得。
当距离一定时,合作目标舰船运动方向(从船尾到船头的舰船纵轴方向)与红外成像导引头视线方向夹角为0°时,目标图像像素数最少,为90°时,目标图像像素数最多。其他夹角时,合作目标舰船图像像素数应位于上述两者之间。
2)对于潜在目标,通过计算给定距离上的目标图像像素数,结合主动雷达导引头测得的距离进行判断,检验像素数和距离的关系,完成目标判别。
对于潜在目标,根据战场情报可知其尺寸,在此设为长×宽×高=M(以m为单位,为已知量),通过红外成像导引头输出的图像处理后得到其图像像素数为S。设合作目标舰船尺寸长×宽×高=N(以m为单位,为已知量),合作目标舰船0°运动方向图像像素数为A,合作目标舰船90°运动方向图像像素数为B。则潜在目标在给定距离上的图像像素数S满足下式:

为减小漏报概率,将量程进行如下扩大,即如果下式成立

则认为该潜在目标为待攻击目标,从而完成目标判别。
否则不是待攻击目标,需重新选择。
4 结论
多模复合制导是提高目标检测识别能力的必然发展趋势。本文方法立足现有装备,在空间对准、数据关联、目标判别3个信息处理流程中,将分立导引头的冗余信息进行融合处理,该融合处理算法的最大特点是计算量小,实时性好,实现了“信息倍增”的效果。该方法已应用于实际外场装备中,通过多次外场试验,显著提高了海天背景中舰船目标检测识别的置信度和可靠性。相对于单一的主动雷达和红外成像处理算法,本文提出的信息融合算法,对由天气变化、电磁干扰等因素造成的敏感程度显著降低,可以为集成式复合导引头的研制提供有益参考。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
北京航空航天大学学报(2022年5期)2022-06-06
北京航空航天大学学报(2021年4期)2021-11-24
北京航空航天大学学报(2021年6期)2021-07-20
舰船科学技术(2021年12期)2021-03-29
中国新技术新产品(2020年19期)2020-12-25
兵器装备工程学报(2019年10期)2019-11-08
空天防御(2019年3期)2019-08-23
弹箭与制导学报(2019年2期)2019-08-22