
集装箱码头集卡全场调度系统的应用
2020-02-21 08:51汤海亮胡跃朋王日金
水运管理 2020年12期
汤海亮 胡跃朋 王日金
【摘 要】 为提升集装箱码头作业中集卡的作业效率,将集卡调度系统与GIS和GPS结合对集卡精准定位,通过建立集卡作业指令打分模型对集装箱码头装卸船任务指令进行动态计算,有效避开堆场作业冲突,实现集卡全场作业调度和最优作业平衡度配置,最后通过对实际作业数据分析,评价集卡全场调度系统的有效性。结果表明:集卡全场调度系统能有效提升集卡重载率,缩短平均装卸作业距离,从而降低集卡运输成本和能耗,提升集装箱码头装卸船作业效率。
【关键词】 集卡调度;GIS;打分模型;作业冲突
0 引 言
随着GIS和GPS系统在码头应用的普及,集装箱码头调度部门可以实时获取集卡位置,使得全场动态调度集卡成为可能,从而达到节约集卡能耗、提高码头装卸效率的目的。集卡作为集装箱码头生产作业的关键运输设备,集装箱码头管理者若要降低港口生产成本,高效完成装卸指令,就必须合理配置和调度集卡;因此,如何提高集装箱码头集卡作业效率是集装箱码头管理者的一个重要课题。
集卡调度方面的研究已有许多研究成果。李广儒等[1]运用码头GPRS系统收集集卡速度、流量、位置等数据,通过蚁群算法判断阻塞状况和调整可行节点集,能有效缓解码头阻塞,提高集卡利用率和码头作业效率。吕品等[2]研究集卡作业面的集卡调度模式,以岸桥等待时间最短为前提对集装箱运输船装卸作业路径进行优化,缩短了集卡行走路程,降低成本,提高集卡工作效率。赵金楼等[3]考虑集卡数量和空载距离等因素,分别构建以集卡行驶距离最短为目标和以集卡任务间空载距离最短为目标的两种集卡路径优化模型,通过粒子群算法解决了每辆集卡的路徑任务分配及作业顺序的问题。李凡等[4]综合考虑大作业面模式下系统总作业时间、岸吊等待时间以及集卡空载率问题,建立多目标优化模型,并运用启发式方法提出一种混合在线集卡调度算法,并以港口实际数据对模型进行验证。
以上这些研究多集中于路径优化方面,大多为静态研究,对于动态作业指令分配的研究尚有不足。本文侧重考虑堆场作业均衡和场地繁忙度等因素展开动态研究。
1 集卡全场调度原理
集装箱码头GIS和GPS的主要作用是对集卡等作业设备进行实时动态定位。集卡调度系统根据集卡位置和作业任务分布,将作业指令分配给集卡。
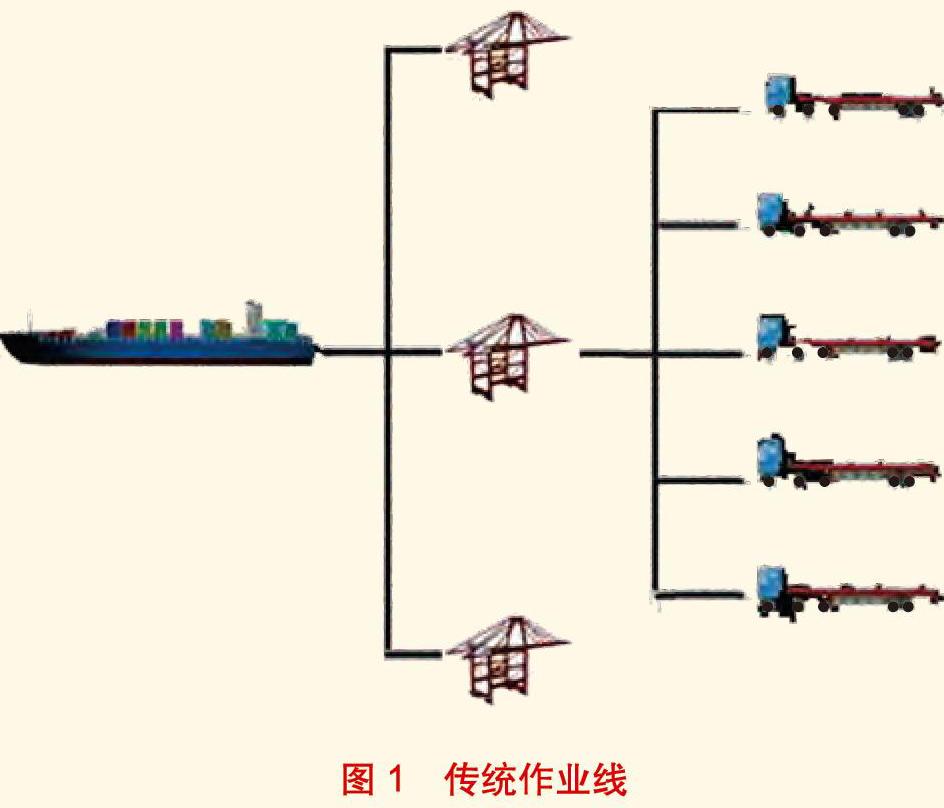
传统的集装箱码头装卸船作业普遍采用的是桥吊与集卡捆绑的“作业线”(见图1)模式。
在这种作业模式下,集卡跟随桥吊作业,各条作业线之间的集卡互不相干,但集卡调配缺乏灵活性,空载距离较长,容易出现作业不均衡等现象。
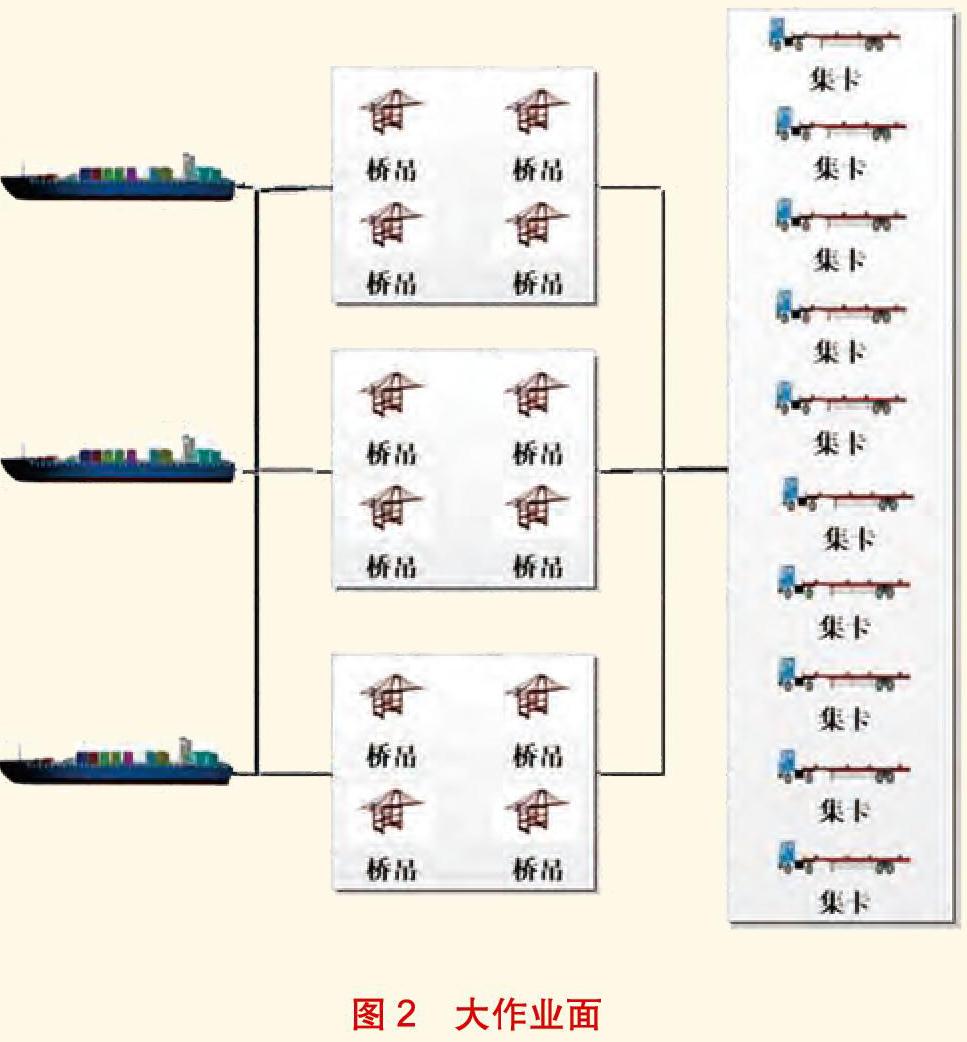
为了提高集卡利用率,边装边卸模式和大作业面(见图2)模式得到广泛应用。
在这种作业模式下,集卡在码头前沿与堆场之间的行驶路径不是固定的,但会出现某辆集卡同时被多个作业路径需要或者一个作业路径有多辆可利用的集卡的情况。集卡调度问题需要通过最优作业路径选择来解决。集卡多路作业共享模式则是将集卡统一到一个“设备池”中,通过计算机自动派发指令给集卡,实现集卡全场调度。在集卡多路作业共享模式下,某辆集卡不再固定为某台桥吊作业,而是由系统从当前码头所有桥吊的指令中筛选出最优指令,集卡根据最优指令进行作业。集卡多路作业共享模式操作简单,集卡利用合理、灵活。
2 最优指令的筛选
集卡全场调度系统通过实时定位系统获得集卡位置,在集卡空载后对需要作业的指令进行计算,最后将最优作业指令分配给集卡,以保证所有集卡资源在全场作业的高效利用。
2.1 均衡性打分
在自动派发指令时,优先考虑的因素是桥吊作业的均衡性,即根据每台桥吊的作业能力设置集卡数量。由用户设置每一路最大集卡数量和最小集卡数量,这样既能保证每台桥吊下都会有集卡,又能控制集卡数量,减少排队现象。均衡性打分公式如下:
式中:S1表示i集卡作业j指令时的均衡性得分,xj表示j指令所属桥吊的用户设置集卡数量;a为均衡性系数,a=1 000分/辆。
2.2 桥吊优先等级打分
船舶的在泊时间往往取决于该船重点路径的作业时间,因此用户可以设置重点路径数值,这样可以保证重点路径集卡的数量,从而提高重点路径的作业效率,减少船舶在泊时间。假设桥吊优先等级最高级设置为40 000万分,桥吊每分派一辆集卡需要扣减2 000分,则有
式中:S2为i集卡作业j指令时的桥吊优先等级得分; yij表示为i号集卡作业j指令后所属的桥吊下的集卡数量。
2.3 集卡路径距离打分
路径选择是一种基于精确定位并结合作业集卡行驶路径,对每个节点进行测距,然后通过代码计算泊位对应所有堆区距离并将数据录入表中,使系统可快速读出最短路径的方法。为了提高路径的最优性,针对每台桥吊工作点下的作业队列,读取作业队列即将作业的3条指令,每条指令的距离便是相应的扣分值,将最终分值最高的指令(距离最近)派发给集卡。集卡路径打分公式如下:
式中: S3为i集卡作业j指令时的路径得分; c为路径系数,c= 1 分/m; lij为i集卡作业j指令的路径长度,m。
2.4 堆场繁忙度得分
对堆场装船作业队列下发箱堆场后6条作业指令进行预安排,读取作业对应堆场作业指令数量,并进行打分,则有
式中: S4为i集卡作业j指令时的堆场繁忙度得分;dij为i集卡作业j指令时的堆场指令数。
以某堆场为例,当10>dij≥5时,堆场繁忙度总分会被扣除1 000分;当15>dij≥10时,堆场繁忙度总分会扣除2 000分;而当dij≥15时,堆场繁忙度总分则会扣50 000分,即该堆场已经饱和,不再接收集卡指令。
2.5 桥吊单路集卡的重空载比率打分
依据当前桥吊指令最大值设定,自动控制桥吊下集卡数量。当最大值设定为8时,单路径卸船空载或者装船重载集卡数量超过6,那么该路径的集卡便不会接收到该桥吊指令,而选择其他桥吊指令。此种情况可以避免人为疏忽,未及时发现异常情况而造成大量集卡在作业桥吊下等待。具体打分公式如下:
式中:S5为i集卡作业j指令时的空重载比率得分;T1为i集卡作业j指令时的空载集卡数量;T2为i集卡作业j指令时的重载集卡数量。
2.6 指令计算次数打分
作业时某些作业指令的位置可能与作业桥吊和作业堆场相隔较远,经过多次计算可能都无法被集卡选中,因此需要引入积分制对作业指令进行打分,则有
式中:S6为i集卡作业j指令时的指令累计得分; f为积分系数, f= 100分/次; nj为j指令被计算的次数,由计算机记忆统计得出。
2.7 集卡选择指令总模型
集卡i空车选择指令时,读取可以作业的每台桥吊需要作业的指令序列中的第一条未作业指令,并进行计算,并选取作业指令中得分最高的一项,则有
式中:S为i集卡作业j指令时的总得分; Iij表示第i集卡选择j指令作业。
3 效果评价
3.1 实验条件说明
梅山岛国际集装箱码头有5个在用泊位,拥有海岸线1 800 m,桥吊20台,集装箱堆场70块,轮胎式龙门吊69台,集卡175辆。
3.2 实验数据对比
为对模型的有效性进行验证,在2019年第四季度使用该集卡全场调度系统进行实验,并选取2018年第四季度未使用该系统前的数据进行对比,见表1。
由表1可以看出:通过使用集卡全场调度系统,作业指令分配更加合理高效,可以有效减少集卡的行驶距离;使用后比使用前缩短12.65%的行驶距离,重载率提升了19.52%。集卡全場调度系统的使用,使集卡突破了传统模式中只能单程重载的局限,实现了重车上码头、重车到堆场的作业模式。经计算,平均每条作业指令可以节省0.05 kg标准煤,为打造绿色港口发挥了积极作用。
同时,集卡通过避开作业繁忙堆场,缩短了桥吊和龙门吊的等待时间,优化了码头集卡资源的合理配置,降低了集卡出勤数量,可以有效提高船舶作业效率,从而减少船舶在港时间,降低航运企业运营成本。桥吊集卡配置比同比降低4.66%,干线船舶在泊效率同比提高10.10%,单机效率同比提高8.51%,人力成本同比降低13.45%,有效提升了作业效率,码头服务水平也得到了提升,产生了良好的社会效益。
4 结 语
随着智慧港口、绿色港口建设的兴起,集装箱码头智能调度系统建设开始逐步完善。GIS和GPS系统为码头管理者提供了更好的决策支持,集卡全场调度系统为集卡调度和日常业务管理提供了一个方便、科学有效的工具。从应用数据可以看出,集卡全场调度系统能有效提升码头的装卸作业效率,提升集卡重载率,降低集卡的行驶距离以减少能耗,实现绿色节能减排的目的。
本文阐述了梅山岛国际集装箱码头有限公司在集卡全场调度系统尝试中取得的成果,该成果可供其他码头借鉴。未来的集卡调度研究可以向全自动搬运机器人等自动化装卸设备的调度配合研究方向发展。
参考文献:
[1] 李广儒,杨大奔,任大伟.集卡动态调度路径优化算法[J].交通运输工程学报,2012(3):86-91.
[2] 吕品,乐美龙.基于作业面的集装箱港口集卡路径及成本优化[J].青岛科技大学学报:自然科学版,2015(3):327-332.
[3] 赵金楼,黄金虎,刘馨. 集装箱码头的集卡两阶段路径优化研究[J].中国管理科学,2017(4):152-157.
[4] 李凡,杜玉越.一种基于多目标优化的混合在线集卡调度方法[J].山东科技大学学报:自然科学版,2017(2):107-114.
