
基于深度学习及GPU计算的航天器故障检测技术
2020-06-06 06:56田林琳
计算机测量与控制 2020年5期
田林琳
(沈阳工学院 信息与控制学院,沈阳 113122)
0 引言
随着航天技术快速发展,航天器自动化水平越来越高,航天器通常于高温、高压等恶劣环境中,一旦设备在飞行过程中出现故障,那么将造成不可预知的问题,甚至对人们安全出行带来严重影响,因此,对航天器故障进行有效检测已经成为该领域研究的热点问题之一。在现阶段,最常用的航天器故障自主检测方法主要包括人工蚁群算法、模糊算法[1]。由于航天器故障检测方法能够快速自动检测出航天器潜在的故障问题,进而为航天器设备维护提供依据,保障航天器安全飞行。
传统故障检测方法大多针对的是航天器周期性故障问题进行识别与搜索的,自主性相对较差,而航天器故障多具有非线性特点。采用传统故障检测方法对故障进行检测,往往需要耗费大量成本,但检测精准度较低,无法达到满意检测效果[2]。
为了避免上述方法的弊端,提出了基于深度学习及GPU计算的航天器故障检测技术。GPU计算技术的发展为基于深度学习检测航天器故障优化加速提供了有效途径。在GPU计算方式下,结合航天器故障信号特点,对故障检测算法进行优化加速,进而保证航天器的安全运行。
1 航天器故障信号特征分析与检测原理
航天器正常飞行时,其运行状态特征信号变化幅度较小,大部分集中在某一尺度范围内。在单位时间内,航天器飞行所受到温度影响,无论大小,其飞行频率都存在一定差异,因此,研究某阶段部分数据能够如实反映出该阶段的状态。航天器设备的各个部件都具有一定可靠性,在规定条件下,航天器可靠性与运行时间呈正比例关系[3]。航天器可靠性将随着时间推移而降低,航天器出现故障的时间也是随机的,输出的故障信号也是极不规则的[4]。由于航天器出现故障,特征信号在时间是分维数的,因此,采用GPU计算方法更能准确反应航天器运行状态。
航天器故障通常分为“硬故障”和“软故障”两种,其中“硬故障”指的是航天器出现突发性硬件损坏,而“软故障”指的是某些参数出现不良变化,故障检测过程是识别航天器有无故障出现的过程[5]。
航天器故障检测原理可描述为:
构造深度学习检测模型,在此模型中,随着层次不断提高,输入样本层次相对抽象。基于深度学习的航天器故障检测过程是通过模型层次分析获取样本的本质过程。在样本训练过程中,可通过调节相关航天器参数,使输出结果最大化接近输入值,以此获取输入值的相关层次特征。在该过程中,将每一层输出结果视为下一层输入结果,以此实现相关输入数据分级表达,进而实现较高层次学习,不断重复该过程,直到模型识别目标故障特征位置,通过该原理能够实现对航天器故障的高效检测[6]。
2 基于GPU计算技术航天器故障特征提取
GPU计算技术是显卡的中心,与图形处理器类似,只不过GPU是专门为执行几何计算而设计的。时下GPU具有3D特征提取功能,通过在坐标位置中确定一个特征,那么利用GPU技术就可以迅速计算出该图形所有像素,并在指定位置获取相应特征[7]。获取的GPU图像如图1所示。
图1 GPU图像
针对航天器在运行过程中出现的微弱振动信号提取需求越来越迫切,故障特征提取是实现航天器故障检测关键环节,最常用的方法是GPU计算技术提取方法,是一种平稳提取方式。由于条件限制,难以获取航天器振动数据,采用地面设备振动数据作为故障数据源,提取相关故障特征[8]。具体提取方法为:设置提取频率为10 k,每1 024个振动检测值,作为一组数据源,从中随机选取25组数据。对每组数据进行模态分解,获取多个组合,并对这些组合进行变换特征提取。由于GPU作为故障特征处理,实际上是一个二维分段提取过程,包括从中读取特征图像和标记图像中的X、Y坐标。此外,输出写地址是由光栅处理器来确定的,无法改变程序应用,实际上,碎片处理器是一个SIMD数据并行执行单元,在所有碎片中执行独立代码[9]。对每个代码中所代表的信号进行模态分解,获取的故障数目不一定相等,但通过信号统计分析,可将所有信号能量比构造为特征向量,实现对全部故障特征的提取。
3 基于深度学习航天器故障检测
3.1 深度置信网络模型
依据上述提取的故障特征,采用深度学习方法对航天器故障进行检测。深度置信网络模型是深度学习的主要模型,是一种无监督特征学习模型,其基本组成单元是基于受限玻尔兹曼机模型构建的,能够最大概率拟合输入数据,同时捕获输入数据中隐含的高阶相关性。每一层都是由可视层和隐含层所组成的双层网络模型,各个层次间的神经元节点是有连接的[10]。在GPU计算技术支持下,将提取的航天器故障特征作为输入数据样本,而隐含层相当于特征提取器,在相关模型连接权值参数支持下,可将构建的深度置信网络模型分为两部分,分别是无监督形式预训练阶段和有监督形式的微调阶段。
图2所示为3个隐含层和1个可视层组成的深度置信网络模型。
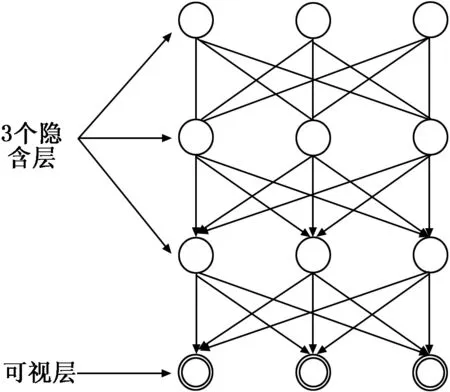
图2 深度置信网络模型
由图2可知,3个隐含层为无监督形式预训练阶段,而1个可视层为有监督形式的微调阶段。在这两个阶段下,对航天器轴承故障问题展开分析。深度置信网络模型具有若干个隐变量层的生成模型,该单元通常是二值的,只有一个隐藏层存在一个隐含层。顶部两层之间连接是无向的,而其他层次之间连接是有向的,箭头代表了最接近数据的层次。深度神经网络在每一层都是对最原始输入数据进行特征描述的,由于深度网络是分层训练的,因此,最优一层分类器可换为任意一种分类器。在对航天器某个节点进行故障检测时,需丢掉网络第三层,才能形成自联想神经网络,使其形成一种更好神经网络模型,实现对故障数据的重构,也为航天器轴承故障检测奠定基础。
3.2 轴承故障预测
根据上述内容构建的深度置信网络模型的输入及隐含层神经元输出在训练中伯努利值,大大限制了其在时序数据预测中的应用。由于输入层和隐含层各个单元都是连续性随机单元,因此,越高度逼近连续型非线性时序数据,越说明该轴承故障数据越多[11]。
采用基于深度学习航天器故障检测技术对轴承故障进行预测,可通过特征指标准确描述关键机械部件故障特征,将经过GPU计算技术下提取的故障特征用于深度置信网络故障预测基本数据。所使用的具体步骤如下所示:
1)运用GPU计算技术提取振动加速度数据,推测航天器轴承的使用寿命。
2)提取不同状态下振动参数,组成多维特征矢量。
3)根据原始多维特征矢量融合特点,判断轴承故障出现的综合特征;
4)通过正常时期指标数据的训练样本,将出现的故障综合特征进行归一化;
5)对模型参数进行优化,建立轴承故障振动连续预测器模型。
6)对可能引发故障的相关数据集进行预测。
通过对轴承故障预测,能够搜集相关数据,为故障识别奠定基础。
3.3 轴承故障识别
在对不同故障任务进行识别时,需设置不同网络参数,在正常情况下需通过人工经验来耗费大量时间。因此,需设计一个具有参数自适应能力诊断模型,以此提高轴承故障识别适应性。轴承故障如图3所示。

图3 轴承故障
由图3可知,轴承故障位置依次为外圈、密封处、内圈和滚动体。根据该故障位置,提出的一种基于深度学习及GPU计算的航天器故障检测技术,用于轴承故障识别,具体识别步骤如下所示:
1)分析并识别滚动轴承振动信号;
2)构建数据样本集作为训练样本,用于故障的识别;
3)检测识别网络权值矩阵,并处理偏置矩阵的初始化数值;
4)检测技术可以自动确定网络所有的关键参数,用于识别;
5)根据深度置信网络模型中的最优测试样本,用于测试识别故障。
通过把轴承的复合故障振动信号和单故障信号进行归一化处理,在构造故障样本,根据不同故障状态下的信号振动情况进行采样。以多个采样点为基础,学习故障特征,由此实现航天器故障检测。
3.4 故障特征学习
在航天器轴承故障的诊断识别当中,深度学习与先进信号处理之间相互作用,对故障的识别判断发挥了各自的优势。深度学习对信号局部特征的相似数据进行有效的区分和整理,避免数据重复利用。
深度学习方法运用深度置信网络模型,对原始信号无监督特征学习进行监督,使轴承故障特征学习更加完善,同时提高了航天器健康状态自动、高效的识别效果。所提方法具体步骤如下所示:
1)训练机械振动加速度数据;
2)将原始数据进行归一化处理,并将其划分为训练样本和测试样本;
3)使用深度置信网络模型,用于训练样本无监督特征学习;
4)通过构建健康状态分类器,把学习到的训练样本深层特征输入到模型之中。
3.5 智能故障诊断
基于上述内容,设计智能故障诊断实现方案,具体步骤如下所示:
1)智能故障诊断可以直接获取轴承振动频谱数据;
2)智能故障诊断可以直接建立训练样本和测试样本;
3)构建具有代表性的多隐层深度置信网络模型,可以自主区分并获取训练样本;
4)深度置信网络模型具有自主学习的性能;
5)采用深度学习方法实现智能故障诊断。
4 实验
为了验证基于深度学习及GPU计算的航天器故障检测技术可靠性,需结合自身研究成果,依次展示不同方法对航天器轴承故障检测效果。
4.1 实验参数设置
实验设备软硬件参数设置如表1所示。
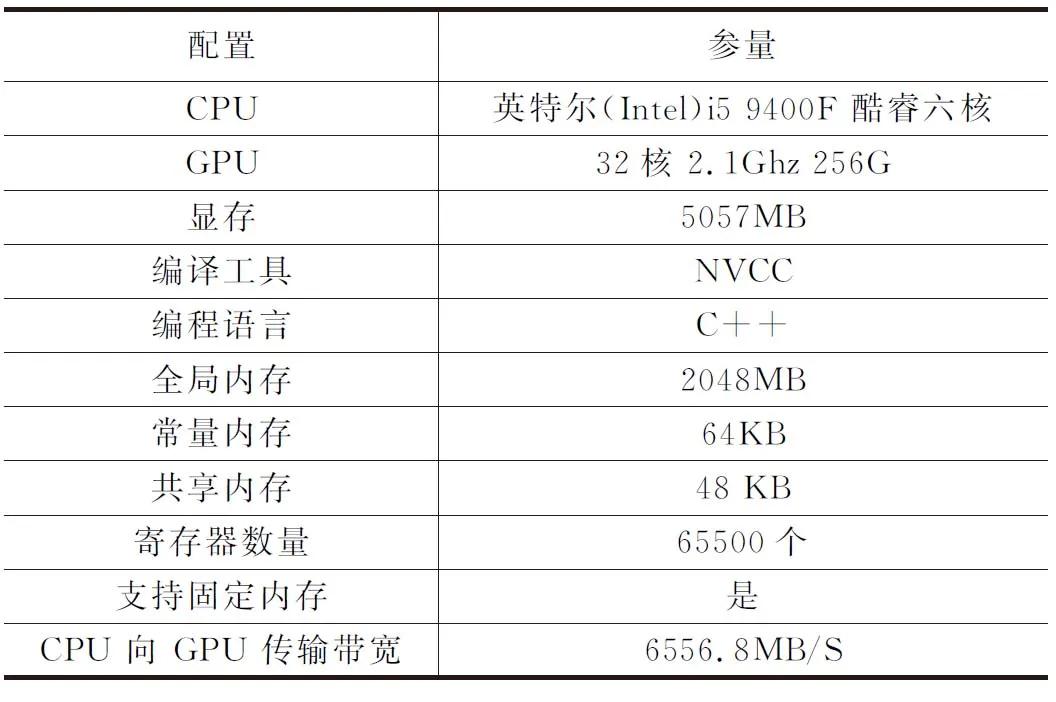
表1 实验设备软硬件参数
4.2 轴承故障检测
将NASA预测数据库中的轴承全寿命实验数据作为样本数据进行检测分析,根据运行时间最长的轴承作为研究对象,通过多次检测数据的结果提取每个信号段的指标数据特征。把全寿命信号分为4 000个数据段,采用融入原始特征向量之中的局部线性嵌入算法,将第一个非零特征值与对应的特征矢量作为综合特征指标,如图4所示。
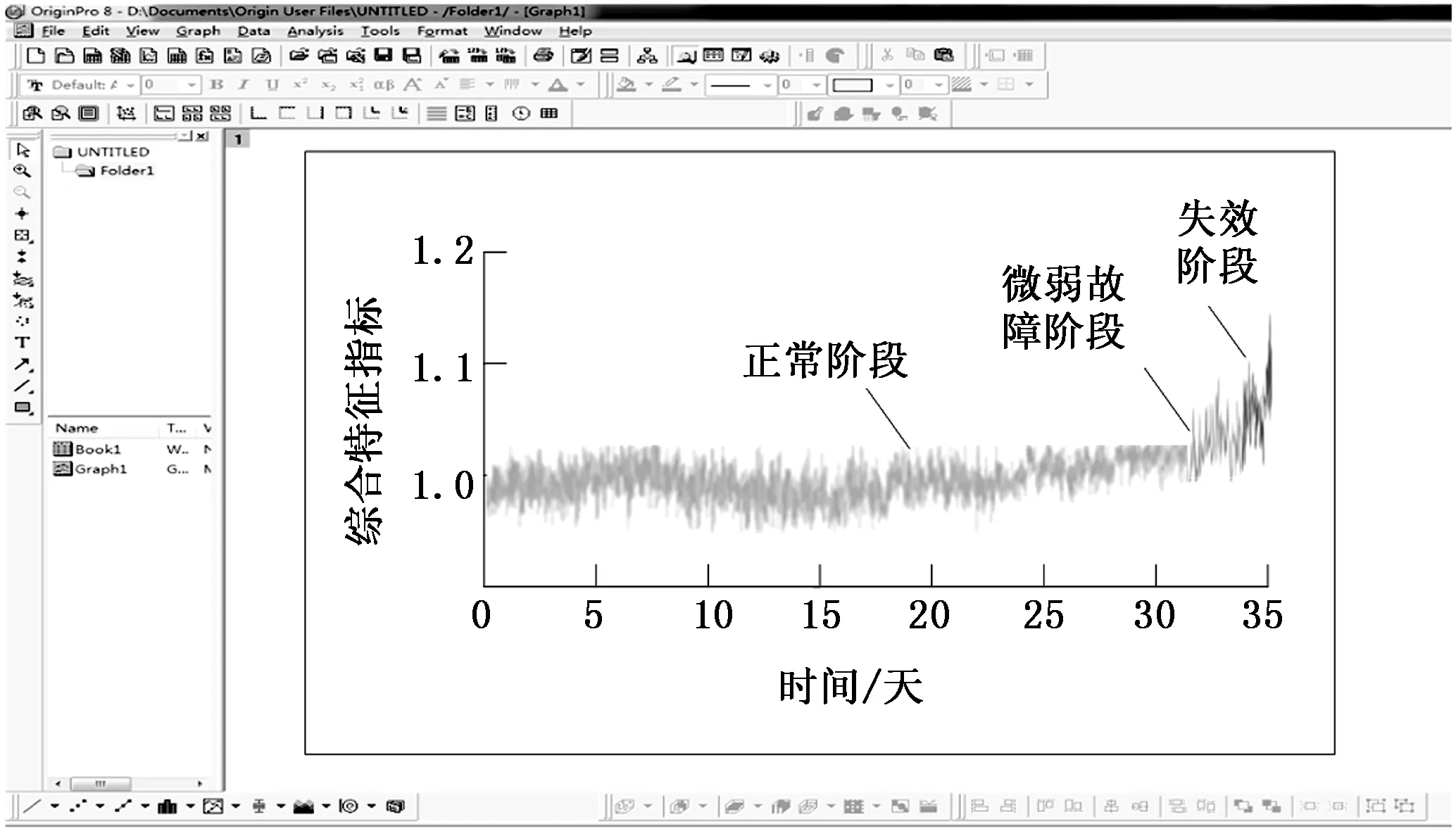
图4 轴承综合特性指标
由图4可知,随着时间的增加,正常阶段下的综合特征指标最高为1.04;微弱故障阶段的综合特征指标最高为1.06;失效阶段综合特征指标最高为1.2。训练样本为第7天到第28天的综合特征指标,预测目标为第28天到第35天的综合特征指标。
将深度学习及GPU计算的航天器故障检测技术与传统故障检测技术在不同时间段下进行对比,结果如图5~6所示。
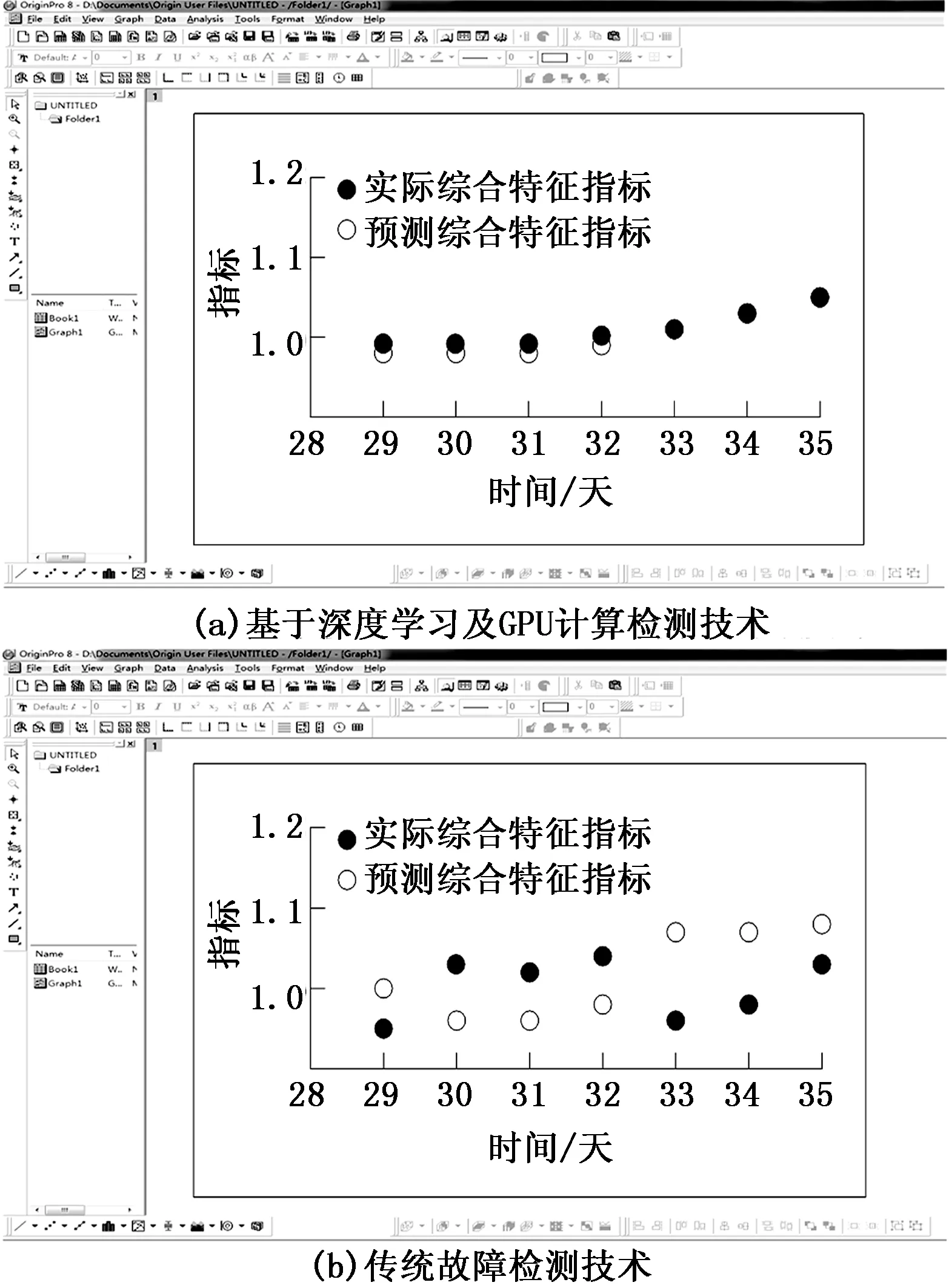
图5 两种技术第7天到第28天综合特征指标
由图5可知:采用深度学习及GPU计算检测技术在第7天到第28天内,预测的综合特征指标与实际综合特征指标基本吻合;而采用传统故障检测技术在第7天到第28天内,预测的综合特征指标与实际综合特征指标相差较大。
图6 两种技术第28天到第35天的综合特征指标
由图6可知:采用深度学习及GPU计算检测技术在第28天到第35天内,预测的综合特征指标与实际指标基本一致,在第32天时,预测指标与实际指标重合;而采用传统故障检测技术在第28天到第35天内,预测的综合特征指标与实际指标相差较大,说明采用传统方法预测效果并不精准,而使用深度学习及GPU计算检测技术预测效果较为精准。
将深度学习及GPU计算检测技术与传统检测技术的检测精准度进行对比分析,结果如表2所示。
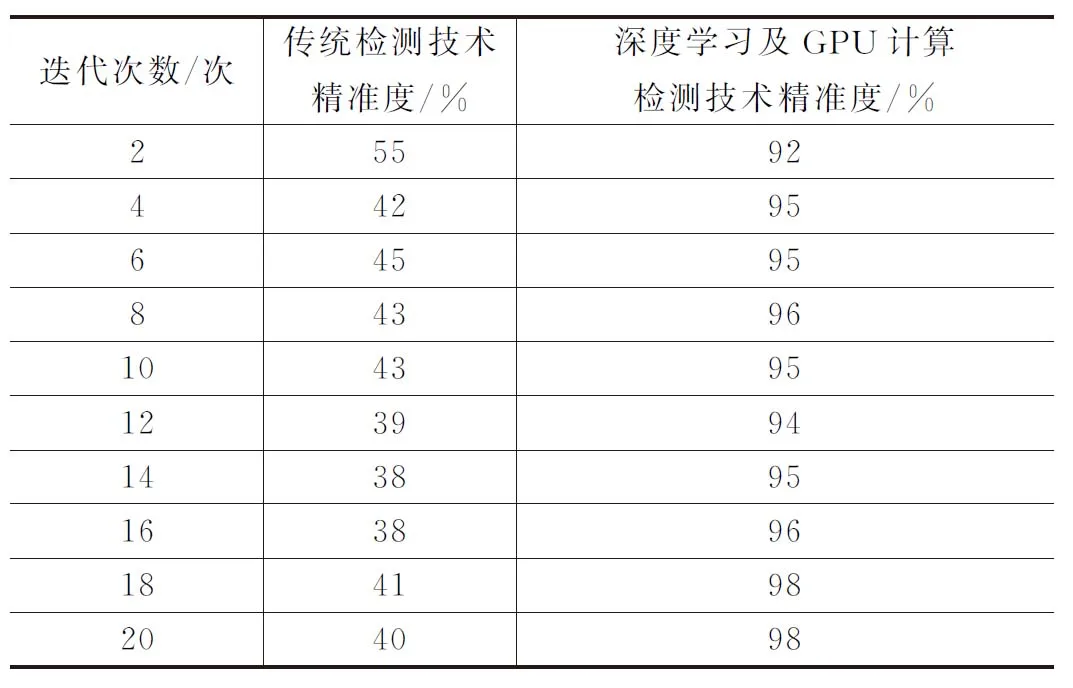
表2 两种技术检测精准度
由表2可知,随着迭代次数增加,传统检测技术始终维持在60%以下,而深度学习及GPU计算检测技术始终高于90%以上。由此可知,深度学习及GPU计算检测技术对航天器故障检测精准度较高,说明该技术是具有可靠性的。
5 结语
针对传统航天器故障检测方法存在检测精准度较低的问题,提出了基于深度学习及GPU计算的航天器故障检测技术。构建深度网络学习方法,深度学习网络模型节点,获取相关故障特征,以此实现对航天器当前故障状态的判定,进而完成航天器故障自主检测。由实验结果表明,该方法在对航天器进行自主检测时,相比于传统故障检测精准度提高较多。采用深度学习方法能够自适应提取输入数据中的代表性信息,摆脱以往检测的依赖,获取可靠故障预测结果。
猜你喜欢
防爆电机(2022年4期)2022-08-17
国际太空(2022年7期)2022-08-16
快乐学习报·教育周刊(2022年16期)2022-05-01
新高考·高三数学(2022年3期)2022-04-28
国际太空(2022年2期)2022-03-15
航天器工程(2022年1期)2022-02-21
国际太空(2021年11期)2022-01-19
汽车与驾驶维修(维修版)(2019年7期)2019-09-10
福建基础教育研究(2019年6期)2019-05-28
科技风(2018年23期)2018-05-14
