
基于MDH模型的导盲机器人定位精度检测系统设计
2020-06-06 06:56张国明
计算机测量与控制 2020年5期
张国明
(广东工商职业技术大学 计算机应用技术系,广东 肇庆 526060)
0 引言
随着现代科技的不断发展,智能机器人逐渐进入人们的生活,甚至成为盲人生活中不可或缺的一部分,为此,对于机器人的定位精度检测则成为了当今智能机器人技术领域中较为关键的课题[1]。
为进一步的提高盲人的生活质量,消除其心理差异,各国对于导盲机器人的研究从未中断,其技术难点在于导盲机器人的定位精度检测[2]。
传统导盲机器人定位精度检测系统能够对机器人系统数据精准掌握,同时采用模型数据位置精准检测,在实验中将课题构建的模型与传统技术对比操作,得出采用传统的数据检测手段完成对定位精度的检测,但无法确保系统操作过程的安全,且研究设计投入成本较大,系统运行时间较长,不具备数据处理功能,无法筛选收集数据完整度,检测准确率较低,为此,针对上述问题,本文设计了基于MDH模型的导盲机器人定位精度检测系统[3]。
本文系统设计分为硬件设计与应用程序设计两部分,在硬件设计中采用智能化数据采集器初步收集数据,同时查找相关定位精度数据,利用S18-2VNDL-2M传感器集中处理数据的传输与过滤,完善系统传输功能,并在此基础上精度检测的研究,实现系统硬件的设计,在应用程序设计中选择不同的设计方法综合性整合与解析定位数据,实现系统的整体设计。
该系统设计在一定程度上完善了系统工作程序,简便系统工作步骤,为数据研究提供良好的工作状态,提升了系统的检测准确率,能够更好的为使用者所使用。
1 基于MDH模型的导盲机器人定位精度检测系统硬件设计
为进一步强化本文基于MDH模型的导盲机器人定位精度检测系统设计的定位精度检测效果,本文加强系统硬件设计,并将其分为定位信号采集模块、传感模块及精度检测模块[4]。
1.1 定位信号采集模块
在系统硬件设计中,为集中数据处理模式,采集定位信号的,本文选用KX-8295W智能化数据采集器,在系统采集的同时定位标准数据,采集器示意图如图1所示。

图1 采集器示意图
此采集器具备1个wifi上行接口、1个RS485上行口,4个RS485下行接口,能够较为精准的完成对定位信号的数据接入,实现多口数据收集操作,支持大容量存储介质,具备历史存储功能,远程传输与控制定位信号,并精准分析定位信号数据,实现定位信号的基础解析[5]。
采集器系统支持ModBus-RT协议、DL/T645-97/07协议、CJ/T188-2004,自定义协议,可根据不同的定位信号可视化的配置管理,在不同程度上系统计算操作,并以此分析信号与研究的契合程度。同时支持与多个服务器之间的联系与系统通信,具备大储量空间,内部存储量默认32M,可扩展至1G[6]。其内部连接示意图如图2所示。
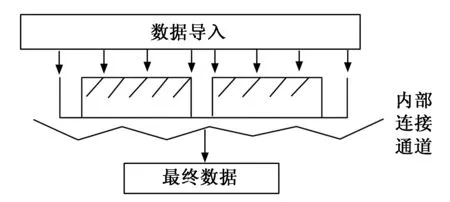
图2 内部连接示意图
内部配置多种模块及默认模板,可直接批量添加设备,并采集数据,在数据状态不稳定的状况下,可自动恢复网络连接,同时建立可靠的TCP连接,以此保证系统的安全运行状态[7]。
同时设置RS485串口波特率,以此完善系统硬件定位信号的采集功能,分为不定期采集与整点采集,将定位信号转化不同的数据采集集合,简便标准处理过程,通过传输信道储存过滤数据,将影响因素排除在外,进而更好地实现对系统硬件中定位信号采集模块的设计[8]。
1.2 传感模块
在实现对定位信号采集模块的设计后,进一步强化对收集数据的数据传输操作,为此,本文设计传感模块,并选用S18-2VNDL-2M传感器实现数据传感操作,并设计传感器图图3所示。
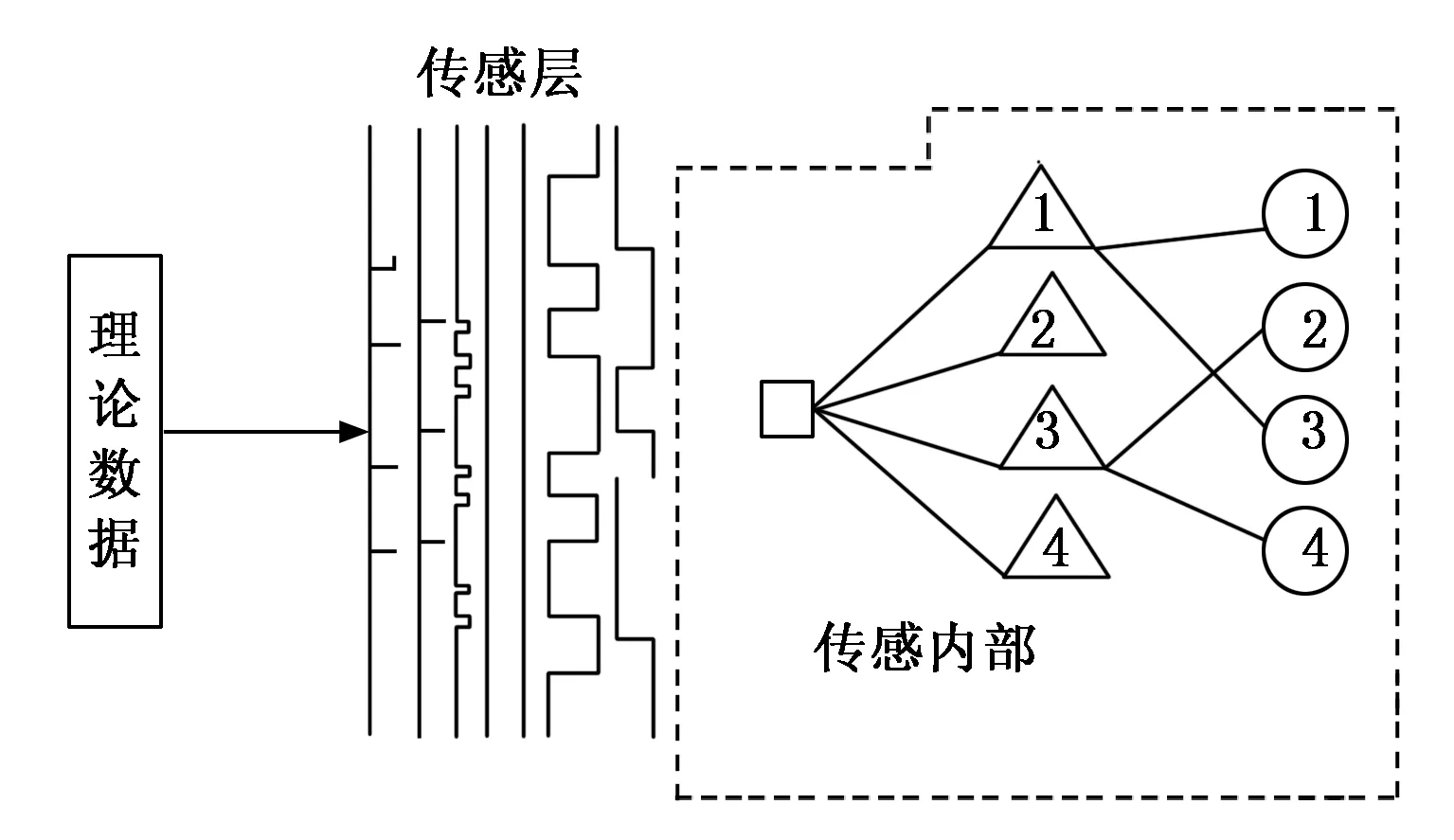
图3 传感器图
在数据传感的同时综合分析数据,选择相应的数据传感通道,并设置固定的传接口,在传输数据的同时,安装传输控制装置,以免产生数据丢失状况,减少系统工作量,优化标准结构与数据模型系统,控制传感器的电源范围为10~30 Vdc之间,可选用SPDT(单刀双掷)NPN或PNP实现输出操作[9]。
由于传感器的材质为完全地环氧基树脂材料,能够提供优越的耐久性,甚至可在恶劣的环境下精准传感,其元件开关为18 mm的螺纹塑料外壳圆柱形光电开关,能够同时完成对直板式和非区域式的检测模式的转换,具备先进的自诊断报警输出,可由双LED指示灯指示传感器状态,以此了解传感器的工作状况,以便及时采取保护措施[10]。
其允许通过的电流范围为交流电20~250 V,输出模式为SPST(单刀单掷)固态继电器输出,负载300 mA,能够精准完成数据传感,并在传感的同时判别定位数据精度,选择符合系统条件的精度数据,将选择后的数据存储至中心系统,以便后续模块研究操作。将其工作温度控制在-40~70 ℃之间,由此确保正常的系统工作状态,实现对导盲机器人定位精度检测硬件系统的传感模块设计[11]。
1.3 精度检测模块
在完成上述硬件设计后,检测系统精度模块的研究,选择无接触式检测装置,利用激光检测仪检测机器人位置定位数据,同时利用三角测量原理指挥数据运行,在数据传输的基础上获取相关的检测数据,利用T1500X22110-P1500450GD激光发射器,将可见光打出,并根据光折射的角度精度数据位置分析,判断理想数据位置,并综合性处理折射镜头内部数据,收集系统数据信息,在完成对放大器件的元件检验后,根据目标数据的位置交换数据信息位置,当位置信息发生改变时,目标数据的位置则会随其改变,其激光发射器图示如图4所示。
控制可变化量处于稳定区间内,设置区间可靠参数检测功能,选用固定式检测器,检测定位精度数据空间,由此测量导盲机器人在不同空间位置的运动状态,以便整体信息的获取以及定位数据的判断,设置三维变量坐标,根据不同的采集信息与数据空间位置强化坐标检测性能,将导盲机器人至中心检测器之间的距离作为系统检测的差距数值,并研究数值间的差异,将差异标准转化,根据反射原理确定导盲机器人位于三维坐标轴之上,设计三位坐标轴如图5所示。
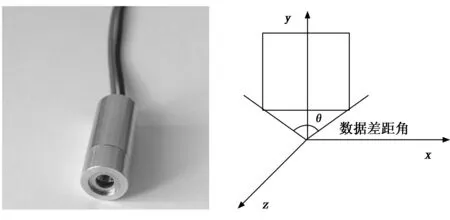
图4 激光发射器图 图5 三维坐标轴图
并通过对照原理设置相同数量的检测点,一次性查找检测数据信息,完成对精度检测模块的理想设计与研究[12]。
2 基于MDH模型的导盲机器人定位精度检测系统应用程序设计
在完成对系统的硬件设计后,以获取的设计数据为基础,设计系统应用程序,设计流程图如图6所示。
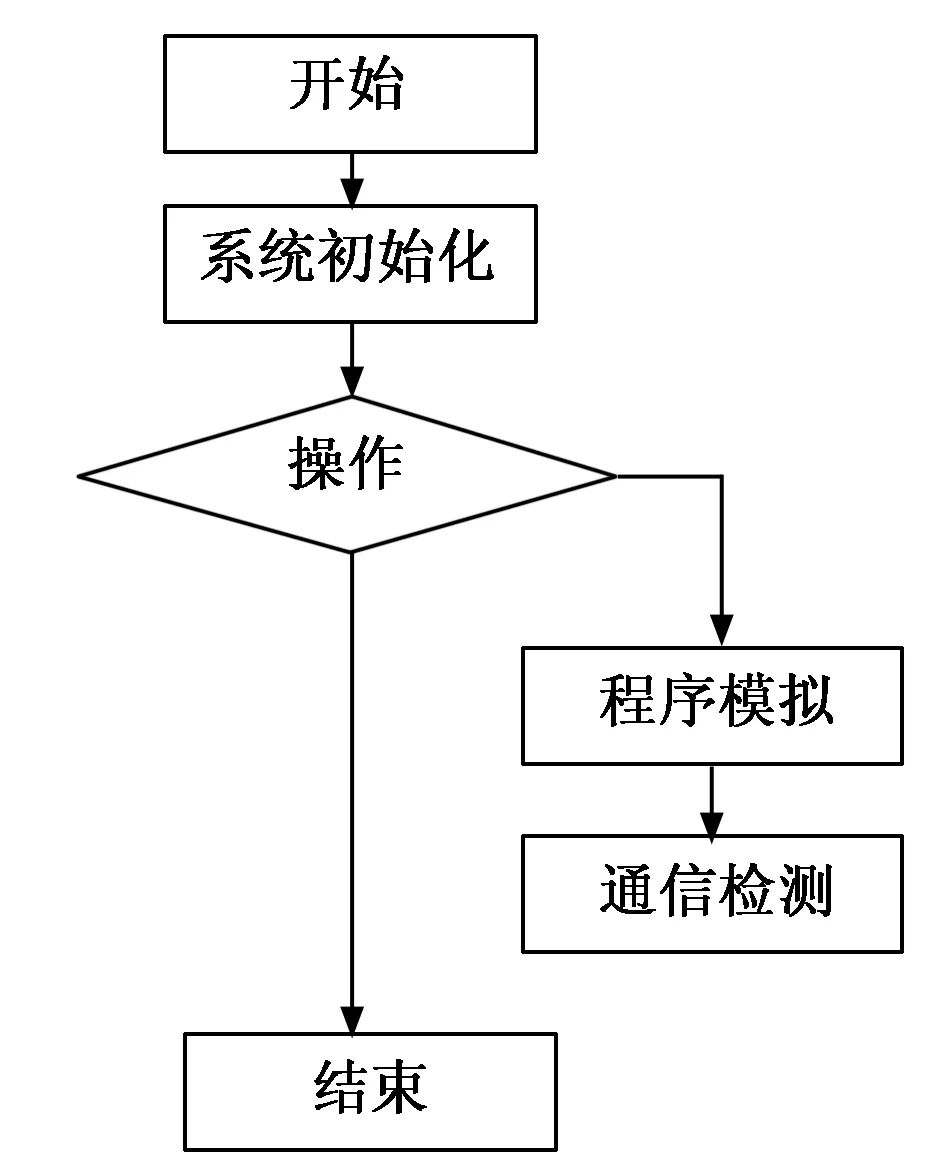
图6 应用程序设计流程图
本文系统控制定位精度数据系统的应用程序,配备相应的通信接口传输定位数据,同时辅助系统操控,实时监控定位数据,并设计如下的应用程序研究步骤。
2.1 应用程序数据通信设计
改造系统的数据通信方式,选择规格相符的传感器操作标准,根据不同的模拟量输出数据应用程序选择,不断整改数据通信功能,在完成通信转换后,对通信规格设定,设置通信速度在112 000~112 500 bit/s之间,总长度为6 bit,并校验总系统,利用不同的指令代码编写通信数据编写,通过编写后的数据应用程序的设计,选取传输编码与读写指令相同向量参数,将参数分类,划分至两个相等的数据空间,并记录系统收集数据参数,以此作为应用程序改造的数据信息来源以供后续研究操作。在数据采集应用程序指令中添加研究所需输送指令,由此获取相应的指令字符串,并转换系统字符串,获得相应的应用程序通信数据,以此完成对系统的通信数据改造[13]。
2.2 应用程序滤波处理设计
在实现程序的通信功能后,需要滤除采集样本的噪声信号,进而获取更加精确的应用程序数据。本文在数据中位值中加入平均滤波整合操作,选择适用于研究的滤波器,辅助数字滤波形式,不断完善系统自身过滤功能,以便滤波功能的运行,同时加大对干扰信号的随机筛选力度,将无关因素过滤,消除偶然因素引起的滤波干扰,抑制周期干扰,保证系统应用程序处于安稳状态,获取滤波后的数据波形,设计脉冲式应用程序处理方案,并将数据转化为可处理数据,简化数据滤波难度,进而缩减系统操作时间,选用平滑度较高的滤波数值,结合算术平均滤波法,在采样数据周期内取n个数据作为基础数据,去除数据中的俩端数值,将剩余数值收至储存系统中,完成对应用程序的滤波处理[14]。设置其处理过程图如图7所示。
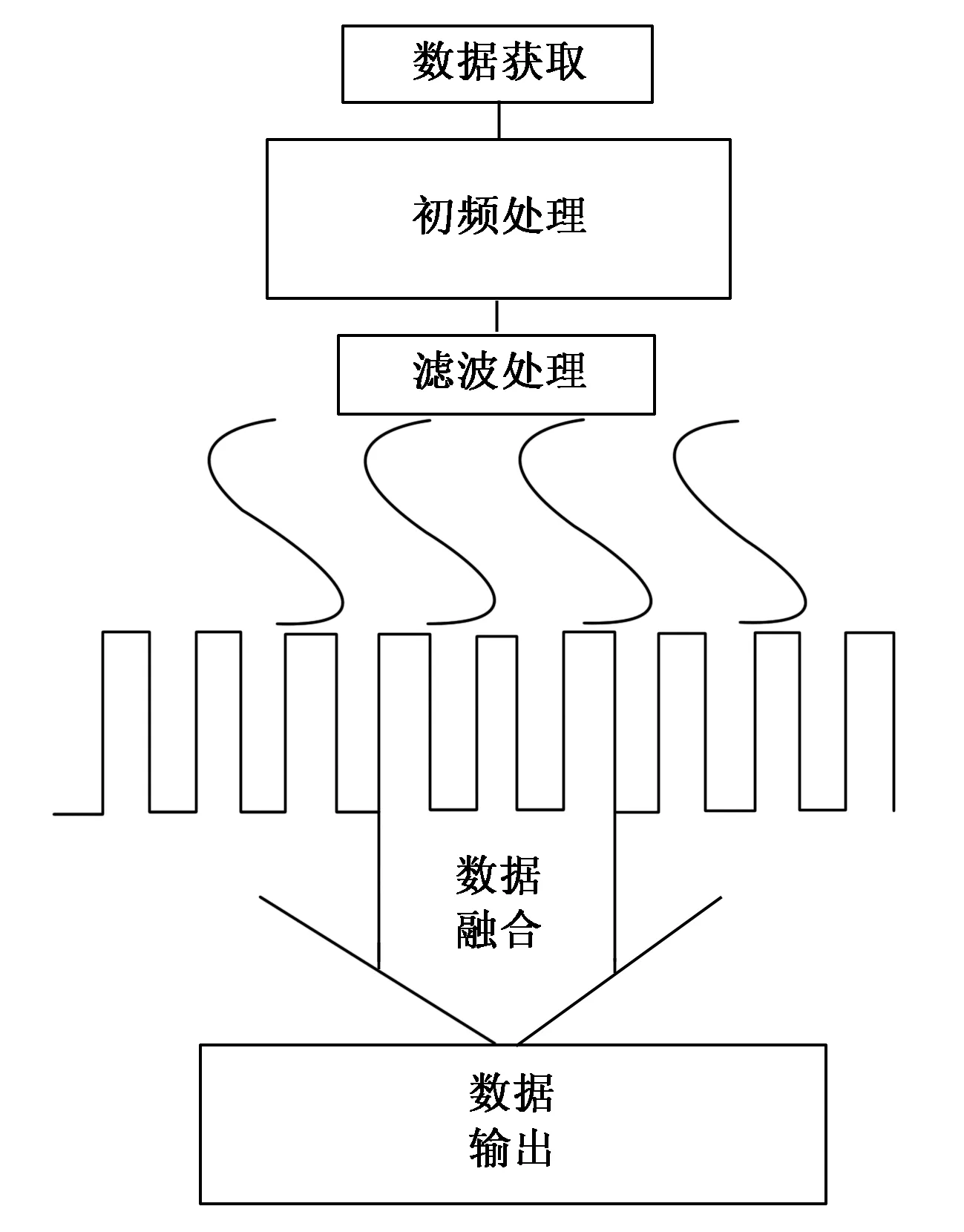
图7 处理过程图
2.3 应用程序数据传输与检测设计
利用系统的控制器与处理终端无线传输定位数据,同时选取无线AP对处理终端接入操作,为每个数据配备不同的处理模板,在接入信息网络后,加强数据传输保护力度,确保数据传输的安全,通过配置IP定位,传输定位精度数据,并整合系统数据,获取相应的精度检测数据,在传输的过程中保护应用程序信息并检测到达数据,完成对系统应用程序的设计[15]。
3 实验研究
3.1 实验目的
为了检测本文基于MDH模型的导盲机器人定位精度检测系统设计的检测效果,对比传统定位精度检测系统,并分析实验结果。
3.2 实验参数设置
针对MDH模型的模型构建复杂性以及导盲机器人研究的标准特殊性,需对其实验参数的设置,如表1所示。
3.3 实验结果与分析
根据上述导盲机器人定位精度检测系统设计的实验参数进行对比实验,将本文基于MDH模型的导盲机器人定位精度检测系统设计的检测效果与传统定位精度检测系统设计的检测效果比较,得到的定位精准率对比图与检测准确率对比图如图8~9所示。
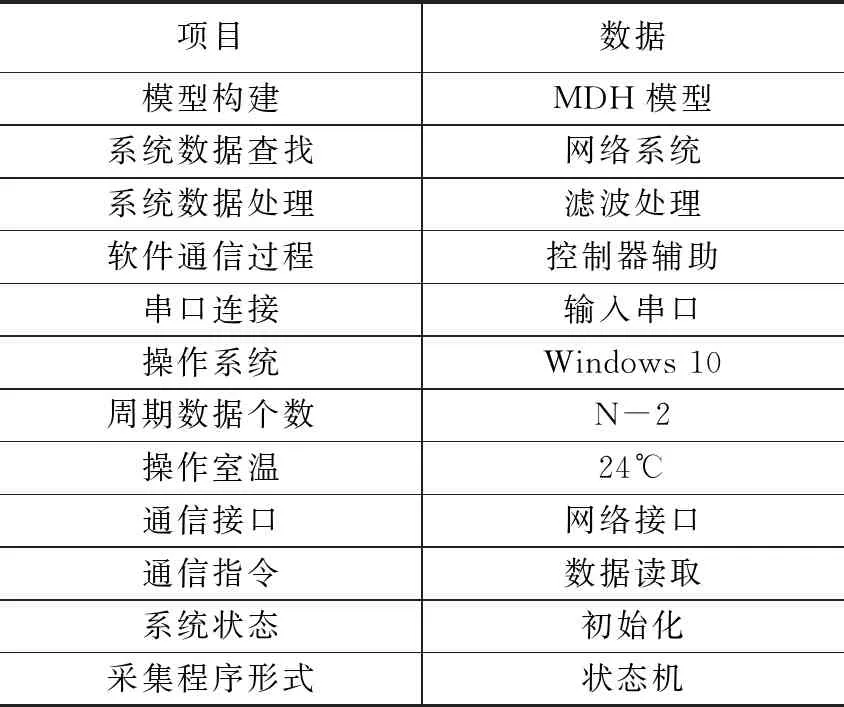
表1 实验参数
1)定位精准率对比图
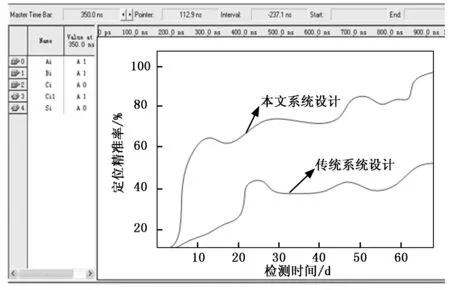
图8 定位精准率对比图
对比图8可知,在相同的参数条件下,本文模型构建研究的定位精准率较高,传统模型构建的定位精准率较低。造成此种差异的主要原因在于本文系统硬件设计部分对硬件元件模块划分,选用KX-8295W智能化数据采集器,在数据采集初级阶段加强对数据的初始化处理,同时强化系统过滤功能,改善系统内部存储空间数量,在系统收集数据的过程中完善系统自主保护功能,并不断稳定系统状态,控制系统处于标准信息主导层面,以此解决系统元件老化问题,在标准实验的基础上利用采集器不同的采集模式对采集数据集中处理,整合处理信息,以此降低数据采集时间消耗率,同时对数据的定位点分析,有利于对定位数据的精准分析,提升定位精准率,保护系统基本操作功能。
2)检测准确率对比图
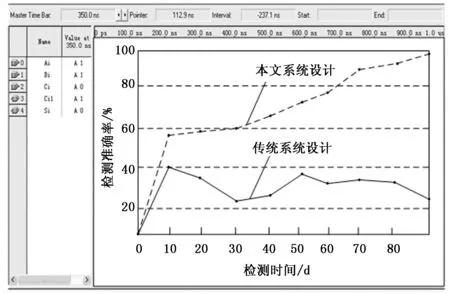
图9 检测准确率对比图
对比图9可知,在检测时间为10 d时,本文基于MDH模型的导盲机器人定位精度检测系统的检测准确率为58%,传统定位精度检测系统的检测准确率为40%,在检测时间为20 d时,本文基于MDH模型的导盲机器人定位精度检测系统的检测准确率为59%,传统定位精度检测系统的检测准确率为36%。
由于本文选用S18-2VNDL-2M传感器数据传感操作,对收集的定位精度信息系统过滤,排除了无关因素的干扰,降低了干扰信号的影响程度,利用相应的数据传感模式疏通数据传输通道,减少数据传输时间,提升系统工作效率,并不断强化了系统数据传感操作,在传感的基础上增强系统主导性能,加大数据保护力度,为研究提供完整的数据讨论基础,有利于数据的精准传输,避免因传输过程中的不当操作造成的数据丢失状况,提高系统检测准确率。
在以后的实验中,随着检测时间的不断增加,本文定位精度检测系统的检测准确率不断提高,且一直位于传统定位精度检测系统上方。除以上原因外,本文应用程序设计中对应用程序分为三方面操作,不断完善应用程序数据的通信方式,并利用模拟量通信数据输出操作,在实现数据通信的同时设定通信规格,以此增强系统的通信功能,辅助校验操作,划分数据空间,转化为不同的数据参考数值,进一步加强数据滤波处理,过滤不完整的定位精度信息,挑选符合系统研究条件的标准数据信息,加大数据信号筛选力度,提升系统的传输与检测技能,无线网络处理,提高系统安全性,增强定位精度的检测准确率,经过以上对比分析可知,本文基于MDH模型的导盲机器人定位精度检测系统设计的定位精准率与检测准确率均高于传统导盲机器人定位精度检测系统设计。在较高程度上完成了对系统的标准设计,提升系统检测性能,并提供了较高的实验利用价值。
4 结论
本文在传统导盲机器人定位精度检测系统设计的基础上提出了一种新式基于MDH模型的导盲机器人定位精度检测系统设计,该检测系统设计的检测效果明显优于传统检测系统设计。
本文系统硬件设计部分对系统定位信号采集模块、传感模块及精度检测模块的设计,选用KX-8295W智能化数据采集器与S18-2VNDL-2M传感器完成对定位精度数据的收集与传输,并根据反射原理利用T1500X22110-P1500450GD激光发射器对导盲机器人的位置定位精度检测,提升系统数据处理能力,完成整体硬件设计,应用程序设计部分进行了应用程序数据通信、滤波处理、数据传输与检测设计,在硬件设计数据的基础上提升整体系统的应用程序处理性能,加强对导盲机器人的定位精度检测操作,提升检测的准确性,缩短了检测所需时间,实现对系统的整体设计。
相较于传统检测系统设计,本文检测系统能够在较高程度上实现对系统的主动性保护,提高检测系统的基础性能,强化研究能力,具备广阔的使用前景。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
导航定位学报(2021年4期)2021-08-29
中国外汇(2019年20期)2019-11-25
电脑报(2019年12期)2019-09-10
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
中国计算机报(2018年30期)2018-11-12
海峡姐妹(2018年2期)2018-04-12
人大建设(2018年12期)2018-03-21
