
基于分层滤波算法的无人机控制系统故障检测技术
2020-06-06 06:56刘哲成郭丽娟
计算机测量与控制 2020年5期
刘哲成,郭丽娟
(天津师范大学 软件学院,天津 300387)
0 引言
无人机的全称为无人驾驶航空器,无人机的操控与其地形环境状况以及操纵人员的身体素质关系较小。因此,其可以在较长时间内完成高危地区的地区勘探与侦察等任务[1]。相对于有人驾驶飞机,操作人员的危险较小。由此观之,无人机在使用方面相较于有人驾驶飞机较为灵活方便,在必要时刻可将其作为诱饵进行系统自行毁坏操作。
由于在高空中作业的无人机具有滞留天空时间较长的操作要求,因此其所携带的装备应该尽可能保持较轻的重量,进而能够容纳较大容量的燃料[2]。与此同时,滞留天空时间的延长同时会造成无人机控制系统的失常,为此,需对其可靠性进行系统加强,目前研究利用系统余度技术以及无人机自动修复控制系统对此问题进行处理[3]。
无人机控制系统故障检测与诊断是一门综合性较强的技术,当无人机控制系统的一项或多项指标参数发生了较大的偏差,并超出了可接受范围,发生故障时,需先对系统进行故障检测,在检测到故障数据后,对发生故障的部位进行系统隔离,并进一步确认故障的属性与特征参数,以上步骤为整体故障诊断过程,需以此对系统进行综合检测[4]。通常情况下,根据控制系统故障的方法不同,将其分为以下几类:按照故障部位可分为被操控过程元器件故障、传感器系统故障、飞行执行器系统故障。按照故障的类型可分为脉冲型综合系统故障、阶跃式综合体系统故障以及元件缓慢漂移型系统故障。
当系统中的量产生与正常工作状态下不同特征时,此种不同特征便隐含着各种故障数据信息,找到这些故障特征描述,并对其进行检测隔离以及故障程度分析完成对故障的检测。为此,本文提出一种基于分层滤波算法的无人机控制系统故障检测技术,对系统进行坐标系与模型构建,并在故障参数提取的基础上对其进行检测[5]。
该技术在一定程度上简便检测过程,提升了故障检测的效率,拥有更加良好的检测效果。
1 系统坐标系与模型构建
为进一步对无人机飞行状态进行准确的描述,需选取适当的坐标系。在确认飞机相对于地面的飞行位置时,可构建地面坐标系用于飞行参照。该坐标系根据检测机体转动形式构建,无人机的运动轨迹可通过构建速度坐标系进行研究,整体坐标系图如图1所示。
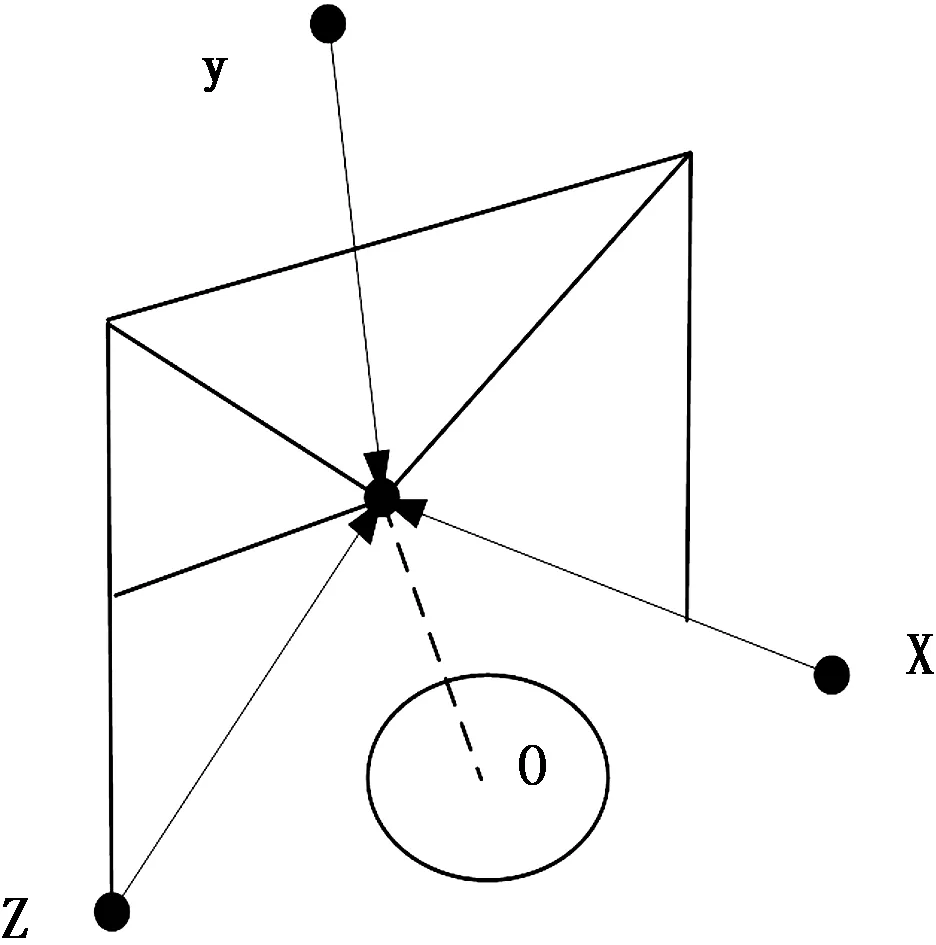
图1 整体坐标系图
无人机控制系统中的故障可能发生在此些部位,为此,构建整体系统坐标系。分为以下几个坐标系的构建:
1)在地面坐标系构建过程中,选取原点Oa作为无人机的起飞点,OaYa为与地平面相平行并指向正北的坐标轴,OaXa也位于平面之内,并与OaYa向垂直指向正东方向,OaZa垂直于地表方向同时指向地心[6]。
3)在速度坐标系的构建中,选取无人机重心点作为原点Oc,保证X轴与无人机的飞行速度V保持一致,Z轴在无人机机体对称平面之内并与X轴相垂直,同时指向机体内腹,Y轴与二维平面垂直,并指向右方。
在机体坐标系与地面坐标系之间构成一个相互关系,将此种关系用三种姿态角来进行表示。滚转角φ、俯仰角γ与偏航角λ。机体坐标系到地面坐标系之间的平行关系式如下:
K=cosφsinγsinλ-sinγsinλ
(1)
在构建其坐标系后,还需要的构建系统模型,选取一定的模型数据,同时收集无人机系统的内部转向角因素,并对转向角进行数据录入,将主系统中所获得的数据进行算法整合处理,同时利用滤波手段控制数据录入量,在录入后,提供所得数学数据,并进行数学模型的构建,将此数学模型作为故障特征的描述模型,其故障时的工作公式如下:
E[W(g)]=0
(2)
在此式中,由于故障计量方法准确度较差,需对其进行进一步的算法预估处理,在构建模型基础上选择模型矩阵,并对无人机的初始状态进行特征参数的统计。为此,需对其进行控制系统故障特征参数的提取,并对参数进行系统的处理分析。其模型对照图如图2所示。
图2 模型对照图
2 基于分层滤波算法的无人机控制系统故障特征参数提取
首先对特征参数进行综合整合,选取不同于正常状态的特征参数,利用噪声估计器将故障进行诊断,选择与标准波率不同的数据波,并计算出无人机控制系统的残余差值,按照残差与零之间的关系进行控制系统传感器的故障检测,同时构建相对应的特征函数进行特征检测,以此来判断出发生故障的具体部位。特征函数角度如图3所示。

图3 特征函数角度图
根据录入噪声的数据与噪声测量本身数据的不同,其测量的结果具有不稳定性[7]。为此,对其进行先验信息的检测,在噪声统计的过程中,可能会对噪声设计产生滤波误差的影响,进而使滤波发生散射情况,为此,应在滤波过程中进行噪声估计器的引入,将未知数据进行综合检测,同时对其差异性进行在线预估,进而实现系统的自适应处理[8]。本文将系统故障产生的噪声与测量故障噪声进行对比,根据对比数据对其进行综合分析,提取噪声参数并加强控制系统的故障噪声反应速率,在非零均时的基础上将噪声特征进行在线估计与检测。由于时变噪声过于特殊,在处理过程中,需加紧时变处理,将噪声加急,并根据所获得的噪声选择适当的故障特征参数,同时选定复杂坐标作为参数统计辅助,加入指数加权法进行参数集中操作,将所提取的参数隔离处理,按照参数的滤波大小分辨故障存在的噪声区域,并不断更新所需测量的数据,保证数据保持时效性。
同样,与连续性和线性的小说、诗歌、传统摄影相比,数码照片是图像、声音与文本之网中的一种要素,是网络多重链接的一个支点。
为加强特征参数的提取,对其进行公式算法的计算,其公式如下:
φ=|X11-X22|
(3)
在此式中,其状态保持在预估滤波后的系统执行状态,对控制系统的工作运行状况的反应较为清晰。同时为保证在动态系统状况下也能完整进行特征参数提取操作,对控制系统进行数据加权处理,将全体数据的参数进行参数平恒加权,最终获得的参数若与加权参数差值大于0.5,则将其判断为残余差值故障参数,并将此参数与集体参数分离,同时录入至故障检测系统中,等待系统的下一步故障检测操作[9]。
3 基于分层滤波算法的无人机控制系统故障检测
将以上步骤所获取的故障特征参数进行系统集中录入,同时进行无人机控制系统的故障检测操作。
首先根据所得数据,构建故障检测机制,同时设置5个中心系统传感器,假设所设置的传感器的故障均为控制系统全局故障,则系统检测机制的设置数量为6个,其中参数值等于0的参数为系统正常工作参数。参数值大于0的参数为5个传感器故障时的检测参数。进一步构建系统正常工作状态与全局故障状态下的检测机制,并利用分层滤波算法将两种机制分离,同时构建包含双层模型机制的模型集。在模型集中,单一故障为检测状态下的第一层系统故障[10]。双重故障为检测状态下5个传感的一至五层故障。同时在此基础上进行故障叠加操作,简便故障检测系统,为其检测提供更大的测量空间。无人机控制系统结构图如图4所示。

图4 无人机控制系统结构图
通过仿真,将所得检测机制进行后验概率曲线的获取操作,在获得故障曲线后对故障部位进行过双重故障机制的启用操作,并获取新的机制数据,同时将对参数组进行重新参数获取操作。其故障曲线图如图5所示。
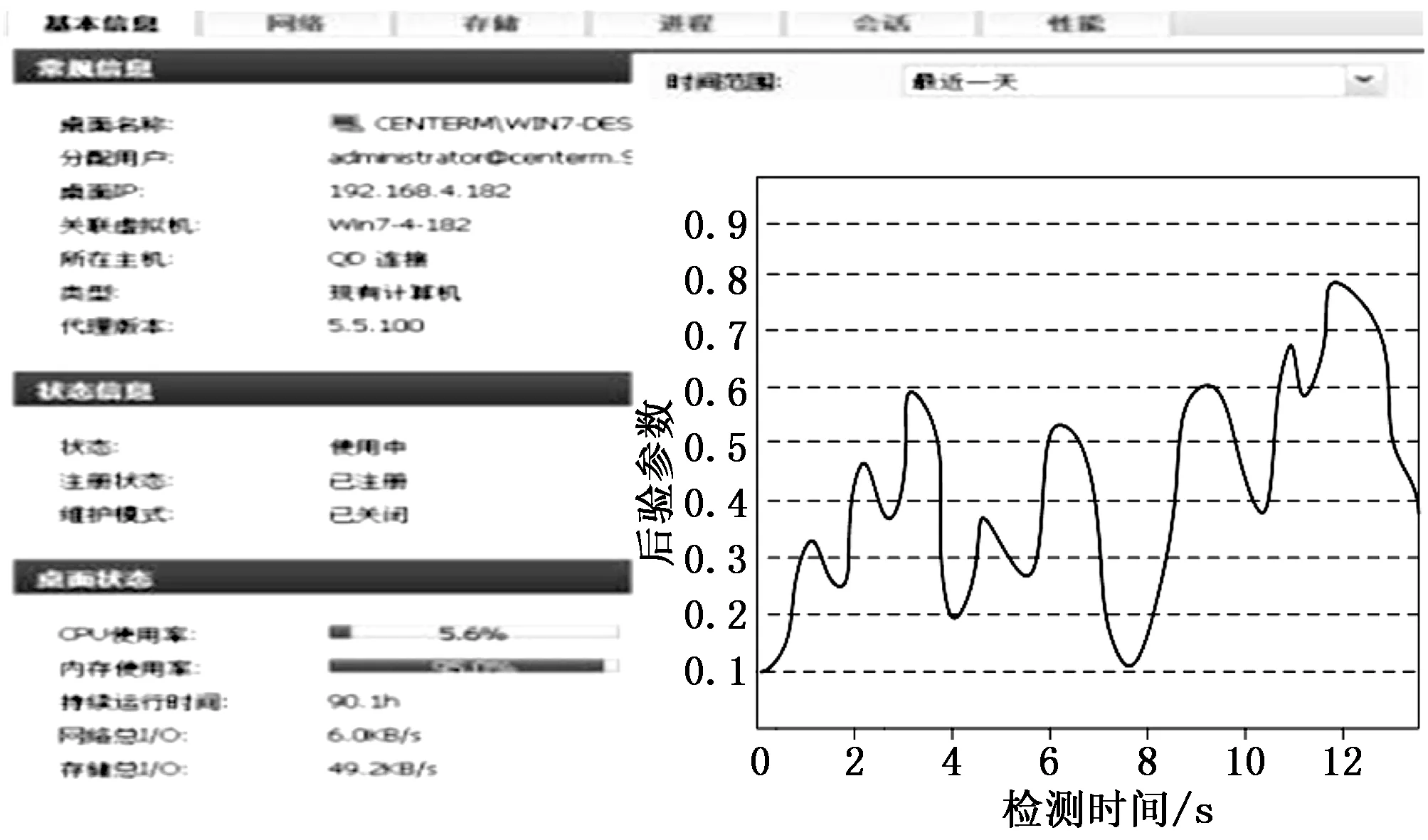
图5 故障曲线图
在双重故障机制启用后,集中处理故障检测参数,选取一个常数k,并将此作为检测标准参考值,当检测参数与此值的差值小于零时,将此检测参数判定为检测出的故障参数。由此可进行其系统故障部位的判定。
将检测的参数进行滤波器与子模型的关系对照比较,一旦确定发生了系统故障,可将此故障作为滤波器检测系统的二重故障,在此基础上对滤波后的参数进行检测,能够大大减少检测的数据量。其滤波器组与子模型图如图6所示。

图6 滤波器组与子模型图
允许算法重新回到初始状态,以确保在下一次的数据检测中系统故障参数能够保持较为良好的检测状态,并减少滤波器的用量,提升其多重检测的性能,更好地完成对无人机控制系统故障的检测。
4 实验研究
4.1 实验目的
为了检测本文基于分层滤波算法的无人机控制系统故障检测技术的检测效果,与传统检测技术进行对比,并分析实验结果。
4.2 基于分层滤波算法的无人机控制系统故障检测模型构建
针对无人机控制系统的操作复杂性以及故障产生部位的不确定性,需对其进行系统分析,为此,构建基于分层滤波算法的无人机控制系统故障检测模型对其进行理论研究,如图7所示。
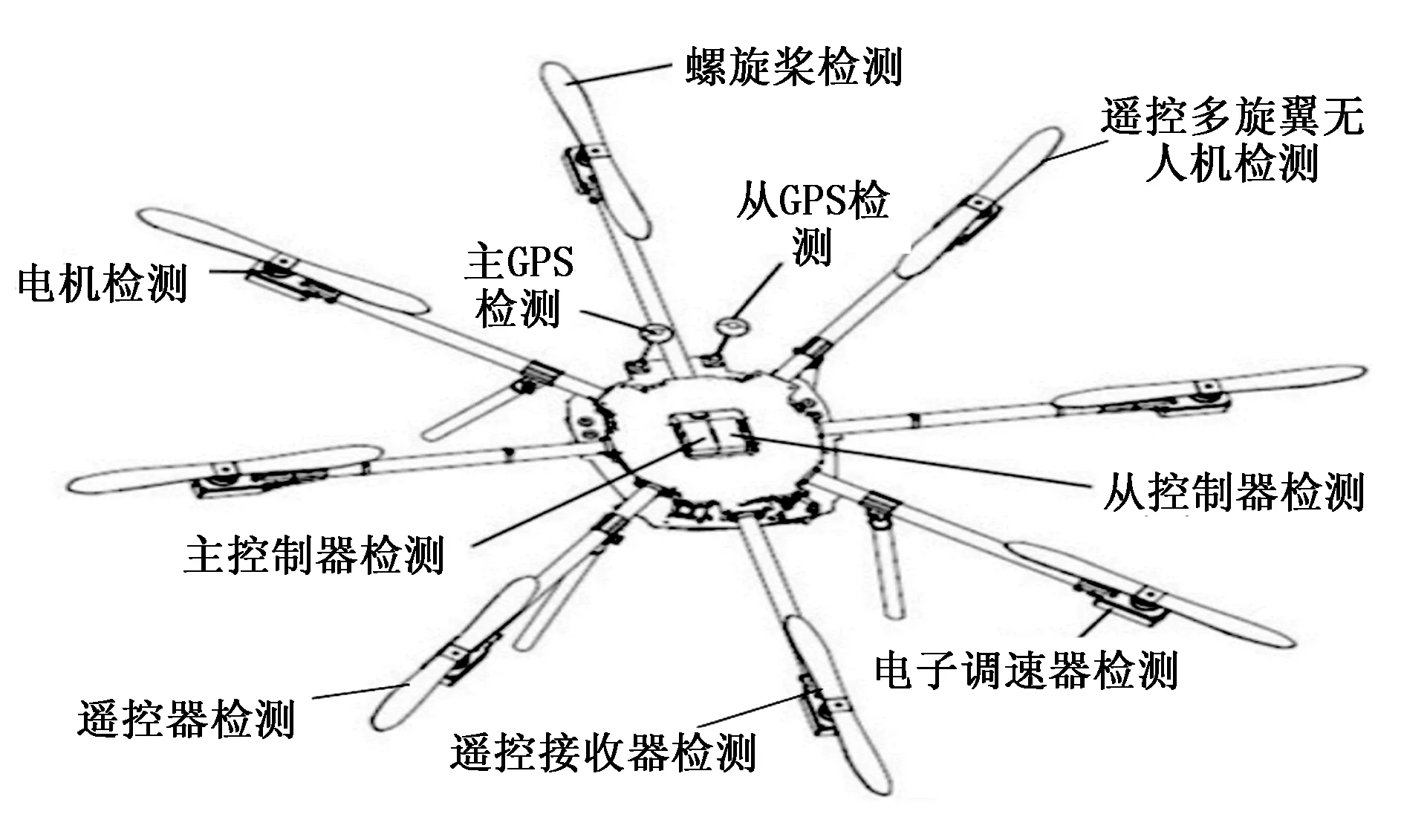
图7 检测模型图
根据上述实验模型的构建,进行实验参数的设定,如表1所示。
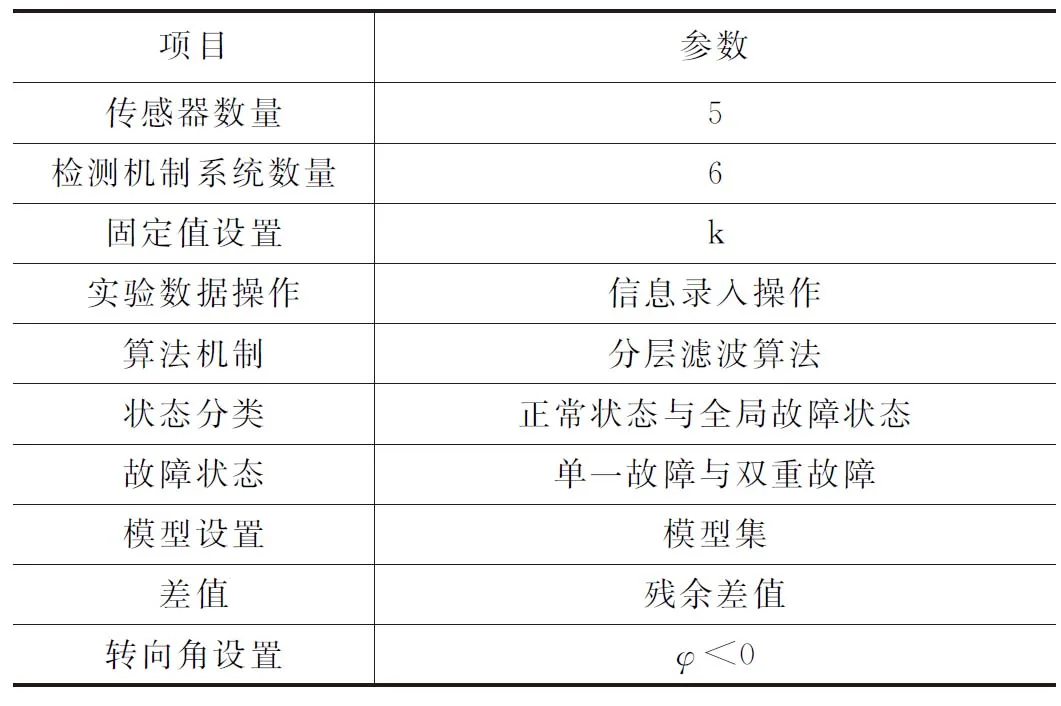
表1 实验参数表
4.3 实验结果与分析
根据上述构建模型进行对比实验,将本文基于分层滤波算法的无人机控制系统故障检测技术的检测效果与传统无人机控制系统故障检测技术的检测效果进行比较,得到的故障检测误差率与故障检测速率对比图如图8所示。

图8 实验结果
对比图8可知,本文选取坐标系构建方法将整体系统检测参数模型化,能够在一定程度上提升对整体故障参数的检测数量,对无人机控制系统的不同状态进行相应坐标的构建方式能够降低系统在检测过程中的不必要损耗,有效的抓住检测重点参数,并能够提供可靠数据,减少数据故障查找的错误率。对故障检测系统进行系统模型矩阵的构建,能够辅助系统对故障类型进行分类操作,并在一定程度上降低了系统的查找重复率,有效降低检测的误差率。而传统检测技术对于该步骤的处理缺失,不能较好的对此进行处理,系统的故障检测误差率较大。
在实验方法检测时间点为12时,本文检测技术的故障检测速率为78.2%,传统检测技术的故障检测速率为51.4%。造成此种差异的主要原因在于本文完成了故障特征参数提取,且在提取时简化了计算过程,进而减少检测所需时间,实验证明在一定的时间条件下,所提方法的根据噪声波值的大小对故障源部位进行判断,能较为精准的查找到故障所发生的具体坐标,能够有效缩减查找时间,提升故障检测速率。
在此后的检测中,随着检测时间的增加,本文检测技术的故障检测速率不断提升,且一直位于传统检测技术之上。除以上原因外,由于本文在故障检测过程中选用传感器分类检测的方法,有效提升了传感器故障检测系统的工作效率,较为细致的分析故障的性质与故障产生时无人机的运行状态,进而增强检测系统的检测效率,专门设置检测机制对检测参数进行集中处理,在较大程度上增强检测系统的专业性,提升其检测性能,并有利于下一次检测的进行。而传统检测技术不具备此项步骤,对于故障检测方面的研究不够透彻,最终获取的故障检测速率较低。
经过以上对比分析可知,本文检测技术的故障检测误差率低于传统检测技术,故障检测速率高于传统检测技术,能够在较大的程度上提升检测系统的检测性能,使检测过程更加精简,有效提升了检测系统的故障检测效率,具备更加广阔的使用前景。
5 结束语
本文在传统检测技术的基础上研究了一种新式基于分层滤波算法的无人机控制系统故障检测技术,该技术的检测效果优于传统技术的检测效果。
本文检测技术首先对整体系统进行坐标系与模型的构建,根据故障可能发生的部位以及机体运行状况的特殊性,对其进行分类,并构建相应的坐标系,同时按照特定的模型数据进行模型的构建,在基础模型构建完成后对其故障特征参数进行提取,对其发生故障时产生的噪声进行分析,将滤波曲线不同的参数挑选出来,大致确定故障发生的部位,在故障特征参数获取后,录入参数并进行检测机制的构建,对参数进行综合处理,利用常数k与检测参数相比较,获得最终的故障检测参数,以达到对控制系统故障检测的目的。
相较于传统检测技术,本文检测技术能够较快的增强系统的自动防御力,并加强系统的自我控制能力,简化算法计算过程,进而更快的计算出故障发生的参数数据,并明显提升了整体检测技术的检测效率,为以后的检测提供更好的技术支持,具备更佳的检测效果。
猜你喜欢
农业工程学报(2022年10期)2022-08-22
舰船电子工程(2022年6期)2022-08-02
舰船科学技术(2022年10期)2022-06-17
导航定位学报(2022年2期)2022-04-11
语数外学习·高中版中旬(2021年11期)2021-02-14
北京航空航天大学学报(2019年9期)2019-10-26
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
电子技术与软件工程(2016年22期)2016-12-26
科技视界(2016年20期)2016-09-29
