
基于POS 的无人机航片快速纠正在应急测绘保障中的应用
2020-08-11 09:19陈笑峰周兴霞陈思思
科学技术创新 2020年25期
陈笑峰 周兴霞 廖 露 陈思思
(四川省测绘地理信息局测绘技术服务中心,四川 成都610000)
1 概述
无人机航摄技术具有灵活机动、高效快捷等优点,在小区域及困难地区影像快速获取等方面具有显著优势[1],已广泛应用于灾害监测[2]、地质灾害调查[3]、地理国情监测[4]等领域,可有效满足应急测绘天地一体、快速机动的要求。而在火灾等特殊情况下对数据时效性要求非常高,应在尽可能短的时间内对实时获取的大量遥感数据进行快速处理,而在前方的无人机小组受地形、应急状况等情况往往无法携带高性能的图形工作站组网进行数据处理工作,即使进行快拼影像处理也需要至少2 小时时间,迫切需要更快、更便捷的方式来直观展现火线实时情况。
综上所述,本文立足于无人机航摄技术在四川省应急测绘保障中的应用,研究基于POS 数据的无人机航片快速纠正,并成功应用于“2020 年凉山州森林火灾应急测绘保障工作”应急测绘保障,为前线指挥部、省森林草原防灭火指挥中心等各级政府和有关部门开展决策部署、应急救援、灾情评估和灾后重建等工作提供了快速、准确、优质的灾情地理信息服务,并归纳总结了该技术在提升应急测绘保障中的作用。
2 已知数据分析
2.1 POS 数据
POS/AV (Position and Orientation System for Airborne Vehicles) 系统专门为机载传感器的地理定位设计,能通过高精度集成的GPS 和惯性测量装置(Inertial Measurement Unit, IMU)[5], 提供该传感器实时或后处理的位置、翻转、俯仰和偏航角度等信息,如图1 所示为部分POS 数据。
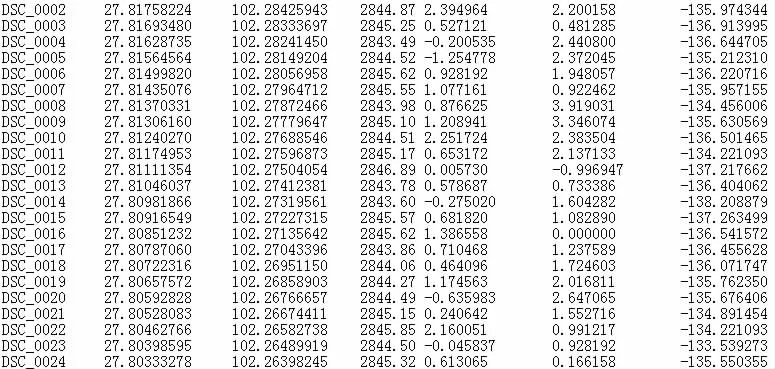
图1 POS 数据
2.2 影像数据及其他数据
影像数据包含飞行获取的所有原始航片,文件类型为jpeg格式,本身不带坐标信息,如图2 所示。
图2 影像数据
其他数据包含数码相机检校报告、像素大小、畸变系数、焦距f 等数据。
3 基于Arcgis Engine 实现航片快速纠正
3.1 实现思路
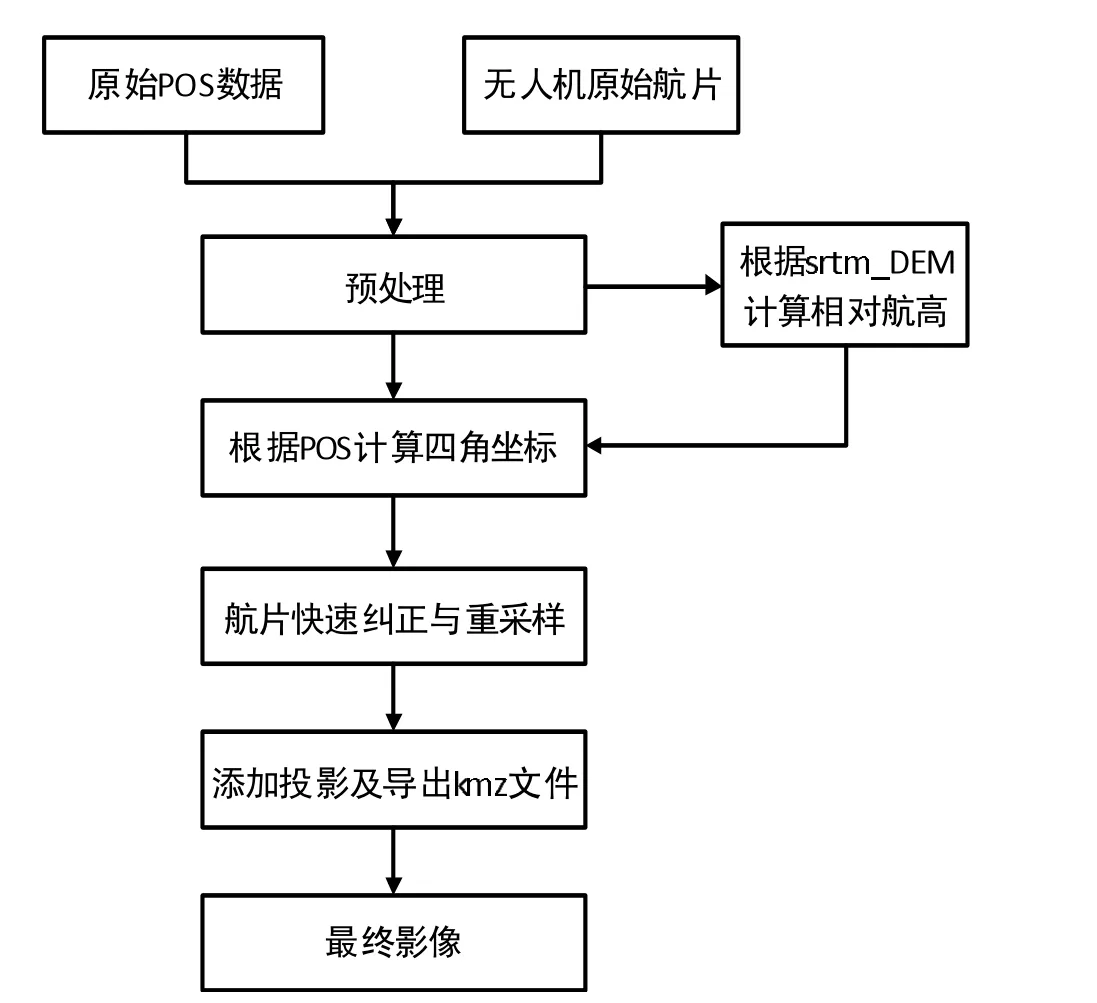
图3 设计方案
根据POS 数据里提供的每张航片中心点坐标、航片行列值,对每张航片赋予坐标值, 依据坐标值可实现航片的快速纠正和相关指标运算。
3.1.1 航高获取和计算成图分辨率
通过已知飞行航片中心点坐标L0 和B0 获取对应地面Srtm_DEM 的高程,计算出:
航高H = 飞行高度(H0)- 地面Srtm_DEM 的高程(H1)(1)
计算地面分辨率Gsd(m)公式如下:

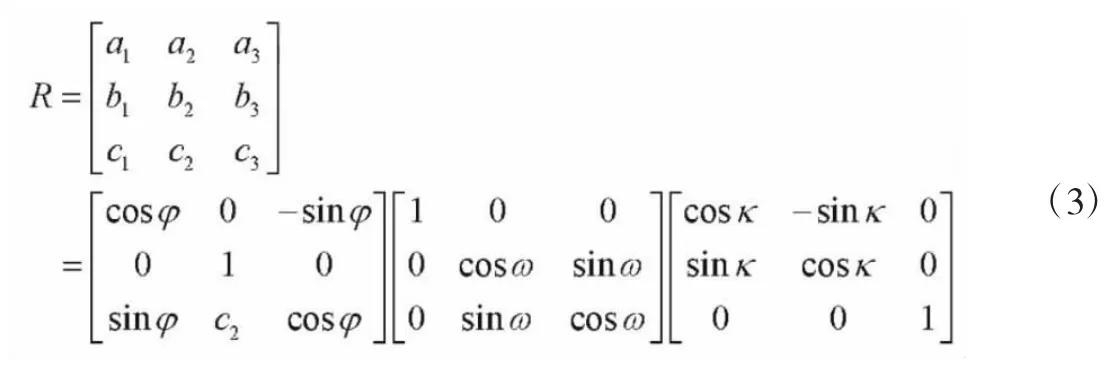
3.1.2 航带图框改正
对影像进行几何校正,根据已知三个角度航向角(κ)、俯仰角(ψ)和侧偏角(ω) 对航片范围进行改正,使用共线方程9 个系数:a1、a2、a3、b1、b2、b3、c1、c2、c3, 由以下公式计算旋转系数,POS 数据记录的拍摄点坐标为经纬度坐标(L0,B0),进行俯仰、侧偏和航向角改正之前需要经纬度坐标换算成WGS84 坐标系下进行投影后的平面坐标(X0,Y0),从而计算出影像四角点的坐标。
根据共线方程算出改正后的航拍范围坐标和分辨率对影像进行纠正和重采样,如图4 为基于ArcEngine 开发的纠正工具。其中配准:pRasterGeometryProc.Warp (inpSourceControlPoints,outPTargetControlPoints,PTransformTypeout, inpRaster) ;//inpSourceControlPoints 为原始坐标点集, outPTargetControlPoints为目标坐标点集,PTransformTypeout 为配准方式, inpRaster 为栅格数据。
保存栅格数据:pRasterGeometryProc.Rectify (outRasterName,outRasterFormat, outpRaster) ;// outRasterName 为栅格名称,outRasterFormat 为栅格格式, outpRaster 为栅格数据。
3.1.3 投影并输出kmz 文件
栅格数据的坐标系转换, 包括该栅格坐标系的定义及投影坐标系的转换,主要用到ArcEngine 的IGeoDatasetSchemaEdit 接口、IGeoProcessor 接口和ProjectRaster 类[7]。栅格数据的坐标系转换应先设置输入坐标系和输出坐标系。部分代码如下:
pProjectRaster.in_coor_system = pInputCoorSystem;// 设置输入数据的坐标系。
pProjectRaster.out_coor_system = pOutputCoorSystem;// 设置输出数据的坐标系。pProjectRaster.in_raster = pInputRaster;//设置输入的栅格。pProjectRaster.out_raster = poutputRaster;//设置输出的栅格。pGPProcessout = pProjectRaster as IGPProcess;pGeoprocessor.Execute (pGPProcessout, null) ;
最后将影像投影到经纬度坐标并输出kmz 文件,方便加载到其他影像地图上。
图5 投影输出工具
3.2 纠正结果
图6 上图为纠正后的影像,上半部分被浓烟覆盖,中间位置可以看见很明显的火线,图6 下图为叠加到Google 地球上进行展示:
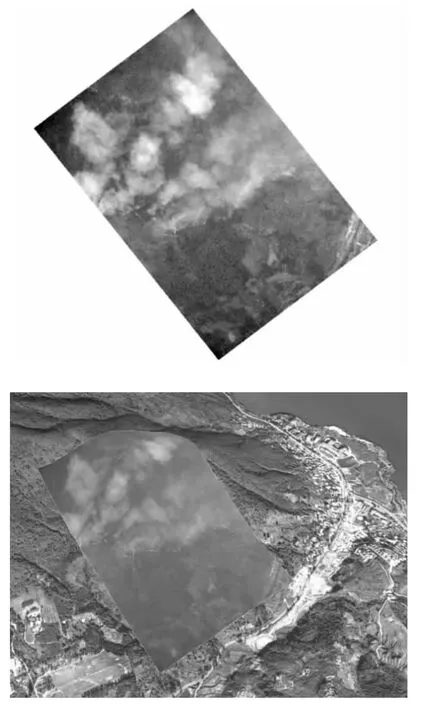
图6 纠正结果
4 典型应用
2020 年3 月26 日起,四川省凉山彝族自治州境内冕宁县、西昌市、木里藏族自治县等多地连续突发森林火灾,火势蔓延,时刻威胁人民群众的生命财产安全。按省测绘应急指挥中心紧急部署,中心立即启动测绘保障应急预案,迅速集结应急测绘保障队伍,携无人机、静中通、动中通等多套应急装备,紧急奔赴灾情现场开展火情侦察,火场地处沟深、谷窄、高差大山区,气流紊乱,无人机只能顺沟或盘旋进行升降,并在火场上方300 米高空执行火势火情侦察任务,获取明火点可见光及热红外视频数据,通过卫星实时回传至后方指挥中心,并同步开展森林火灾视频影像应急专题图制作,为前线指挥部、省森林草原防灭火指挥中心等各级指挥部门及时掌握火点精确位置、轮廓、蔓延方向等现场火情态势、指挥调度直升机开展吊桶灭火和地面消防人员灭火提供了重要支撑。
结束语
四川测绘地理信息局在应急测绘保障工作研究的基础上,通过基于POS 的无人机航片快速纠正,再叠加现有影像地图实现了全面直观的展示航片和火线位置,用于灾情研判、灾后过火面积统计、灾损分析与评估等工作提供了重要的地理信息支撑,同时后方同步制作影像应急专题图,实现了无人机在应急测绘保障方面的典型示范,提升了无人机应急测绘保障服务能力。
猜你喜欢
军事文摘(2022年8期)2022-05-25
导航定位学报(2022年2期)2022-04-11
重庆理工大学学报(自然科学)(2022年1期)2022-02-18
科技创新与应用(2021年31期)2021-11-09
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
学生天地·小学低年级版(2019年5期)2019-06-05
学生天地(2019年15期)2019-05-05
数学大世界(2018年1期)2018-04-12
导弹与航天运载技术(2017年6期)2018-01-29
考试周刊(2018年15期)2018-01-21
