
基于迭代学习的机器人自适应滑模控制*
2021-09-28 01:41席万强宋长坡王尧尧
组合机床与自动化加工技术 2021年9期
席万强,宋 莹,宋长坡,王尧尧
(1.南京信息工程大学滨江学院自动化学院,江苏 无锡 214105;2.南京航空航天大学机电学院,南京 210016)
0 引言
随着工业技术的发展,工厂生产车间从半自动化逐步向全自动化发展,机器代人成为趋势[1-2]。由于多数操作都是重复性的工作,这就需要机器人在面对重复运动的作业任务具有较好的控制性能。迭代学习控制(ILC)对执行周期性任务的系统具有不错的控制效果[3-4]。
迭代学习控制是Arimoto S等[5]在1984年正式提出的一种学习控制的重要分支。经过30年的发展,已经在理论和应用方面取得了丰硕的成果。按照其学习率的不同,又可分为PID学习率[6](包括P型,PD型,PID型)、高阶学习率[7]、最优学习率[8]、前馈-反馈学习律[9]、动态学习律[10]、滤波器型学习律[11]以及与其他算法相结合的学习律(自适应、模糊控制、神经网络)等。PID学习率因其简单形式广泛应用于控制领域。Luo A等[12]提出一种前馈-反馈PI型迭代学习控制律,在PI型控制器的基础上加入D型迭代学习控制器作为其前馈环节,并将其应用到注入式混合型有源电力滤波器中,结果表明该方法不仅计算和使用方便,而且可以有效地提高滤波器的性能。为了提高阀控非对称缸(VCAC)的控制精度,Wang S K等[13]提出了一种PD型迭代学习控制方法,并应用于液压驱动的6自由度并联平台。Simba K R等[14]提出了一种由经典PD控制器和扰动观测器组成的迭代学习轮廓控制器,可以提高跟踪能力。然而,在实际工业作业环境中,机器人的负载通常是未知可变的,这将会对系统造成较大的非线性扰动,影响机器人的控制性能。单独的ILC对抑制系统的各种扰动,尤其是非重复性扰动的作用是有限的,必须将其他控制技术与迭代学习控制技术结合起来,而滑模控制(SMC)对于提升系统的鲁棒性有很好的效用[15]。
为此,本文提出了一种基于ILC技术的自适应鲁棒控制策略。该策略的核心思想是将滑模函数作为控制变量,添加迭代自适应滑模等速趋近律项,以应对不确定位置参数和未知扰动。算法前期主体部分为滑模函数的比例增益,等同于PD控制,辅助部分为迭代自适应控制,算法后期两者主次颠倒。其基本思想为充分利用系统的先验信息,对系统中的不确定参数以及控制器中的未知控制增益进行自适应迭代学习。最后,通过仿真软件针对两种工况对控制算法的性能进行了实验验证。
1 基于ILC的自适应滑模控制器设计
迭代学习下的机器人动力学方程可写为[16]:

(1)

机器人动力学方程需满足如下特性:
(1)M(qk(t))为对称正定的有界矩阵;

定义滑模控制函数如下:
(2)

则机器人的自适应ILC技术的控制器可设计如下:
(3)
其中,
(4)

(5)
由于滑模控制本身的缺陷以及实际工程应用中控制信息的延迟与滞后,使得系统的滑动模态出现抖震现象。对于连续系统,通常采用准滑动模态的方法来抑制这种现象的发生,即通过设定理想滑动模态的某一Δ邻域,并使系统的运动轨迹限制在该邻域内。通常采用以下准滑动模态控制方法:
将理想滑动模态中的符号函数sgn(s)用饱和函数sat(s)代替。
(6)
其中,Δ称为边界层。在边界层外,饱和函数采用线性化反馈控制,而边界层内则采用切换控制。
2 稳定性收敛分析
本节将对基于ILC技术的自适应滑模控制器的闭环系统稳定性进行分析,主要过程分为以下3个步骤。
①Vk(t)的有界性证明:首先定义Lyapunov能量函数,然后通过证明ΔVk(t)≤0,得出Vk(t)为非递增序列;
②V0(t)的连续性和有界性证明:首先证明V0(t)的有界性,然后根据一致连续性判定定理,证明V0(t)在[0,T]上一致连续,再根据闭区间上连续函数的有界定理,证明V0(t)在[0,T]上有界;

在证明过程之前,需要先给出2个定理以及4个假设条件,以用于下文的证明过程。
定理1:一致连续性判定定理:若函数f(x)在区间[a,b]上的导数有界,则f(x)在[a,b]上一致连续。
定理2:闭区间有界定理:若函数f(x)在闭区间[a,b]上连续,则它在[a,b]上有界。
机器人动力学方程满足如下假设条件:

②不确定项和干扰项dk(t)在任意t∈[0,T]及任意k次迭代中都有界;

(1)Vk(t)的递增性证明
选取如下Lyapunov函数:
(7)
式中,
(8)

(9)

对Wk(t)求一阶导数,然后对两边积分可得:
(10)
(11)
为便于等式化简,可将式(1)写为:
(12)

结合式(2)可得:
(13)
将式(13)代入上式得:
(14)
将控制律式(3)代入上式得:
(15)
根据假设①~假设④,可得:
(16)
令δ=α+β,则上式可写为:
(17)
根据假设条件③可知Wk(0)=0,并将式(17)代入式(11)可得:
(18)
将式(18)代入式(9)可得:

(19)
由式(4)可得:
(20)

(21)
从而可以看出Vk是非递增序列,下面只需证明V0有界,就能说明Vk也是有界的。
(2)V0(t)的有界性证明
在证明之前,需给出如下不等式,该不等式在下文的证明中将会用到。
对于ρ>0,有下列不等式成立:
(22)
由公式(7)可以得到:
(23)
对上式求导可得:
(24)
参考式(18)可以得到:
(25)
第0次迭代时,由公式(20)可知:
(26)
代入上式到式(25)可得:
(27)
将上式代入到公式(24)得:
(28)
由公式(22)可知:
(29)

(30)
代入上式到式(28)可得:
(31)
(3)误差收敛性证明
Vk可写为:
(32)
由式(21)可知ΔVk≤-Wk-1,并根据式(8)可得到:
(33)
代入上式到公式(32)得:
(34)
从而有:
(35)
因为V0有界,则在区间[0,T]上可得到:
(36)
3 数字仿真
为了验证上述提出算法的正确性,现以两自由度机械臂作为仿真对象,如图1所示。

图1 两自由度机械臂
依据式(1)得出其动力学方程:
其中,
其中,si=sin(qi),ci=cos(qi),cij=cos(qi+qj),连杆参数如表1所示,设系统的期望的跟踪轨迹为:
qd=[0.5sin(4t) 0.8cos(πt)]T0≤t≤2
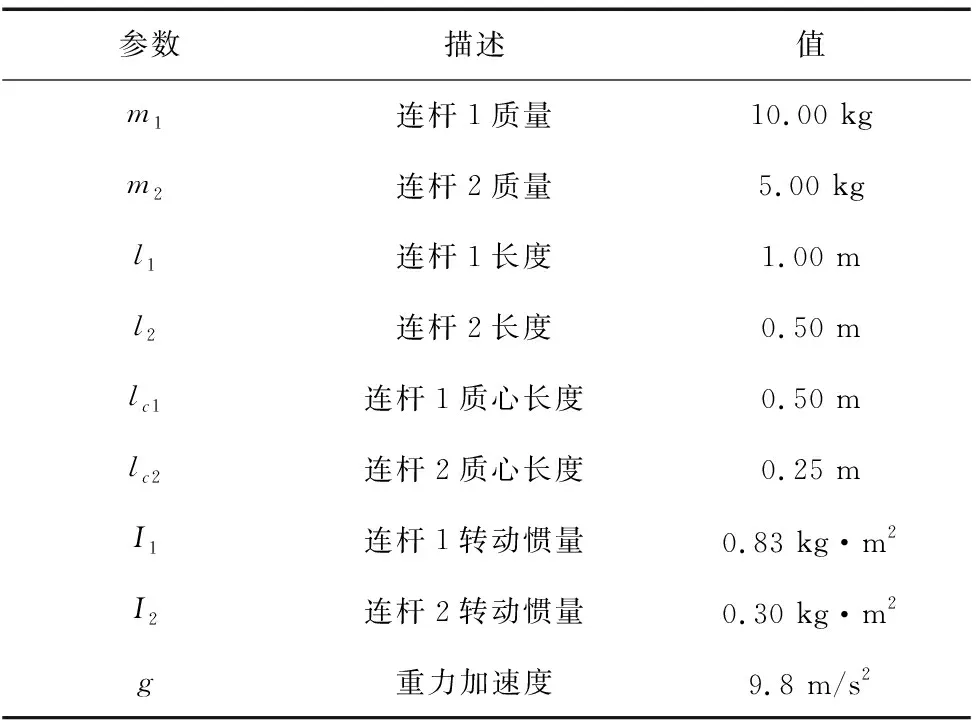
表1 两自由度机器人参数
仿真实验分为两种工况,其中工况1为无干扰状况下,用饱和函数(6)代替控制律(3)中的符号函数(5),比较两种函数对基于ILC的自适应滑模算法(简称ILC-ASM)控制效果的影响;工况2为添加随机干扰,ILC-ASM与ILC两种算法的控制效果比较。
3.1 工况1仿真结果
设定K=[1000 0;0 1000],σ=[1000 0;0 1000],λ=2,即式(2)表示为:
(37)
图2~图5为控制率(3)是符号函数时,算法ILC-ASM对位置精度、滑模函数s以及收敛情况的仿真曲线。由图2、图3可知:第25次迭代后,位置轨迹尽管能跟踪期望轨迹,但偏差有毛刺,不够平滑。由图4中可知:滑模函数在第9次迭代后,收敛至最小值,随着迭代次数增加,反而呈现发散趋势,这主要是因为符号函数的添加,导致了控制器出现了颤振现象,如图5所示。为了消除这种颤振现象,使得系统控制器控制轨迹更平滑些,将式(5)代替为式(6),并设定Δ=0.2,仿真结果如图6~图9所示。由图6、图7可知:替换为饱和函数的控制率之后,系统的偏差轨迹变得更为平滑;最大绝对值滑模函数曲线呈现收敛趋势,如图8所示,说明随着迭代次数的增加,系统的精度将会越来越高;并且相比于图5,滑模函数轨迹变得更为平滑,抑制了颤振,如图9所示。

图2 控制率为符号函数的第25次迭代位置跟踪曲线
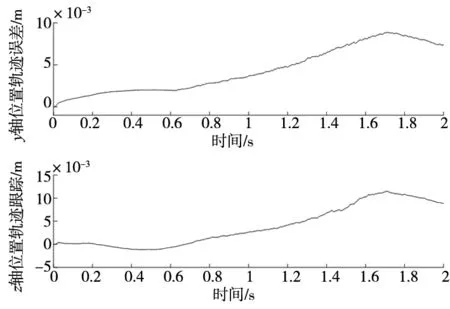
图3 控制率为符号函数的第25次迭代误差曲线

图4 控制率为符号函数的最大滑模函数绝对值收敛曲线

图5 控制率为符号函数的第25次迭代滑模函数曲线

图6 控制率为饱和函数的第25次迭代位置跟踪曲线

图7 控制率为饱和函数的第25次迭代误差曲线

图8 控制率为饱和函数的最大滑模函数绝对值收敛曲线

图9 控制率为饱和函数的第25次迭代滑模函数曲线
3.2 工况2仿真结果
工况2为在工况1的基础之上添加了随机干扰τd
τd=[d1d2]T
(38)
设定随机干扰τd为:
(39)
由于随机干扰的添加,会影响系统的稳定性。为了使系统的稳定裕度变得更大,调节饱和函数的Δ=0.3,为提高其收敛速度,调节σ=[30000 0;0 30000],其它参数与工况1保持一致。仿真结果如图10~图13所示。

图10 第90次迭代位置跟踪曲线
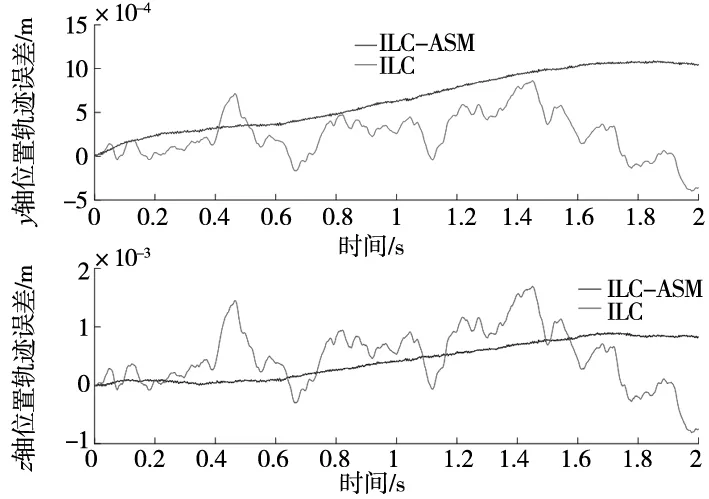
图11 第90次迭代位置误差曲线

图12 滑模函数最大绝对值收敛曲线

图13 第90次迭代滑模函数曲线
可以看出,相比于ILC,算法ILC-ASM具有较好的鲁棒性能以及较高的轨迹精度。随机干扰会使得最大绝对值滑模函数曲线收敛到一定的精度之后,|s|max保持在一定的范围内变动,精度将不会再提高,当然,随机干扰也使得系统的滑模函数呈现随机扰动的模式,分别如图12、图13所示。图11比较的是ILC与ILC-ASM的轨迹跟踪精度,在迭代次数增加到90次后,ILC-ASM的轨迹精度才较好于ILC,可见ILC-ASM虽对非线性随机扰动具有较好的鲁棒性能,但需要迭代的次数却增加了,不可避免地降低了系统的控制效率。图13中的波形图中出现的几个较大的脉冲,可通过调节算法的Δ与σ来抑制,例如,增大Δ的值或减小σ的值,但也会导致轨迹精度变低,收敛变慢,故而Δ与σ的设置,有一个寻优的过程。
4 结论
针对非线性干扰控制问题,考虑到滑模控制优越的抗干扰性能,提出了基于ILC的自适应滑模控制。为了验证该控制器的特性以及对随机干扰的抗干扰性能,分别基于两种工况对其进行了仿真实验,结果表明:
(1) 基于迭代学习的自适应滑模控制,既继承了迭代学习对重复任务轨迹追踪较高的控制性能,又继承了滑模控制较高的鲁棒性能;
(2) 相比于普通的PD型迭代学习控制,虽然调节的参数增加了,但其优点是鲁棒性更强、轨迹精度更高、且更平滑,缺点是收敛速度较慢,需要多次迭代才能达到所需要的精度。
猜你喜欢
茶叶(2021年1期)2021-04-13
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
现代装饰(2018年5期)2018-05-26
中国医药科学(2017年14期)2017-08-17
中国三峡(2017年2期)2017-06-09
西藏科技(2015年6期)2015-09-26
