
混合通信拓扑车队一致性分布式预测控制
2022-06-01 10:01余世明壮2何德峰
浙江工业大学学报 2022年3期
余世明,李 壮2,陈 龙,何德峰
(1.浙江工业大学 信息工程学院,浙江 杭州 310023;2.蚌埠学院 电子与电气工程学院,安徽 蚌埠 233030)
随着国民经济与工业科技的迅速发展,汽车行业得到大力发展,但车辆过多和驾驶员对道路环境感知能力不足等因素会带来交通堵塞和意外事故等问题。车辆队列一致性协同控制通过调整合理安全间距,可提高车辆燃油经济性和道路流通效率,在缓解道路交通压力、实现节能以及提高交通流率和安全性等方面具有重要的作用[1-8]。网联车队稳定性可通过协同自适应协同控制保证,通常需要两车基于车载传感器所测量的局部信息进行交互,即每辆车可接收到来自相邻前车的状态信息,但当车队规模增大时,整个车队对干扰的敏感度也随之增强,则车队协同控制会受到一定影响[9-10]。因此,车队系统的通信结构对于协同控制有着很大作用。在网联车队中通常存在车辆模型耦合、约束条件非线性以及对应的物理约束,如速度和加速度等,使得车队协同控制器更难设计。其中,由于分布式模型预测控制不仅可显式处理非线性约束问题和队列通信等问题,而且可以使队列系统满足良好的控制性能[11-16],从而被众多学者广泛学习。文献[11]考虑带有双向通信的车辆队列非线性系统,设计分布式算法使得队列达到控制性能;文献[13]设计分布式MPC控制器解决车辆单向通信问题,并使得队列满足稳定性;文献[16]建立车辆纵向动力学,考虑在多种不同复杂程度的单向通信拓扑下对假设轨迹与预测轨迹的差值惩罚,并设计分布式控制策略,使得车辆之间达到期望间距,满足一致性。上述研究中,车队协同控制采用单一通信方式,设计相应控制器使系统满足一致性性能,但在考虑大规模车队系统时,跟随车辆接收头车状态信息会越来越困难,则单一通信方式存在一定局限性,不适用于大型车队协同控制。在车辆队列现有工作中,针对协同控制提出了一些其他策略,如考虑把队列控制问题转换为设计一致性问题解决[17-22]。文献[17-18]运用线性化动力学模型,分析系统稳定性,利用恒定车间距设计非线性分布式一致性协议,使得队列系统终态达到一致;文献[19-20]建立三阶非线性纵向偏差动力学模型,其安全间距与车速有关,设计分布式一致性算法,确保队列系统满足一致性;文献[21-22]根据车头时距策略,设计分布式一致性纵向控制器保证车队系统稳定性和一致性。上述研究工作大多是基于一致性问题设计分布式控制器,并应用到车辆队列系统中,但相邻车辆之间的车间距不满足弦稳定性。另外,稳定性证明所应用的线性化方法在系统出现不确定性时会降低精度,在一定程度上影响控制效果。当所考虑的车队系统性能指标是非凸时,仅用传统MPC较难处理,且系统稳定性无法保证。为解决此类问题,许多学者进行了相关研究,文献[23]提出构造稳定性收缩约束,建立闭环系统稳定性和优化问题递推可行性;文献[24]提出基于Lyapunov函数的稳定性约束,用来确保系统稳定;文献[25-26]采用耗散性和对偶性方法,但通常所研究的车队系统是非线性的且存在约束条件,这类方法存在局限性。上述多数工作仅考虑了单个系统,以车辆队列为对象的工作较少,文献[27]基于双层控制策略设计车辆队列协同控制算法,但单车系统稳定性无法得到保证。
笔者所提出的分布式双层策略可有效解决这类问题,且使得系统满足相应的控制性能。首先,在混合拓扑通信下,考虑具有状态和控制输入约束的非线性车队系统;然后,应用MPC、滚动时域策略以及构造稳定收缩约束建立车队系统稳定性、动态一致性优化问题,以递推可行性以及弦稳定的充分条件;最后,通过7辆车的数值仿真验证所提策略的有效性。
1 问题描述
考虑车队系统由n辆车组成,其中1表示车队中第1辆车。令车队中每辆车i(i=1,2,…,n)可以接收到任意与其通信车辆j(j≠i)所传递的信息。在初始时刻,车队跟踪参考轨迹,其轨迹信息为(pdes,vdes),同时所有跟随车辆i接收到期望速度vdes;在其他时刻,第1辆车跟踪期望轨迹,其他车辆i(i=2,3,…,n)跟踪前车i-1,并接收与本车通信车辆j(j∈Ωi)的状态信息。假设车辆行驶在平坦的公路上,模型不存在干扰,且通信性能良好。
车辆i(i=1,2,…,n)的位置和速度由pi和vi表示,定义车辆i相对位置偏差ep,i=sdes-si-(i-1)d和速度偏差ev,i=vi-vdes。则车辆i的纵向偏差离散时间模型[16]为
(1)

umin,i≤ui≤umax,i
(2)
式中:umin,i<0;umax,i>0,且是有界的。通常情况下,车辆刹车性能好于加速性能,即控制输入满足|umin,i|≥|umax,i|以保证车辆良好的刹车性能。假设系统存在平衡点(xi,s,ui,s)满足xi,s=fi(xi,s,ui,s)。对于每辆车i而言,其状态变量可表示为xi(k)=[ep,i(k),ev,i(k)]T。为了书写方便,将式(1)简记为
xi(k+1)=fi(xi(k),ui(k))
(3)
定义1当期望速度vdes在k=0时刻发生阶跃变化时,控制目标是车队中每辆车的状态误差关于原点是渐近稳定的,则称队列系统具有内部稳定[13]。
定义2当期望速度vdes在k=0时刻发生阶跃变化时,控制目标是车队中每辆车的状态关于原点是渐近稳定的,且闭环系统式(3)的位置误差满足以下关系式
(4)
对任意i=2,3,…,n存在βi∈(0,1),则称为弦稳定[13]。
假设车队中包含n辆车,将每辆车视为一个节点,该车队中所有车辆表示为一组元素集合NG={1,2,…,n}。车辆间的通信方式可由一组有权重单向图G=(NG,εG,A)表征。其中εG⊆{(i,j):i,j∈NG,j≠i}表示为边缘集。A表示为邻接矩阵,邻接矩阵A用于描述在跟随车辆的有向通信拓扑,其被定义为A=[aij]∈Rn×n,矩阵中每个元素aij可表示为
(5)
式中:(j,i)∈εG为在节点i和节点j之间存在一条有向路径;aij为节点i从节点j接收到状态信息。而aji是与aij不同的通信连接方式,其表示节点j从节点i接收到状态信息。若从节点i到节点j存在一条路径,其中节点i∈NG与节点j∈Ωi是连通的,Ωi表示为节点i的邻居节点集合,其集合Ωi={j|aij=1,j∈NG},对偶集合Θi={j|aji=1,j∈NG},对于无向图有Ωi=Θi。
对于∀i,j∈NG×NG,节点i与节点j是连通的,则图G是强连通的。当存在根节点i∈NG,∀j∈NG,在一条从节点i到节点j的路径,则有向图包含一条有向生成树,其中有向树是指它除了根节点之外,每个节点都只有一个父节点,而根节点没有父节点,但它有一条路径通往其他所有节点。其是队列协同控制达到一致性的条件之一。
笔者目标是针对非线性车队系统协同一致性问题设计分布式分层控制,使得闭环系统满足稳定性和对应的编队队形,保证安全性,同时使得车队系统状态达到一致稳态。
2 车队一致性DMPC
为了使动态一致性性能在预测时域内最小化,定义动态一致性目标函数为
(6)

问题1:
(7)
s.t.xi(t+1|k)=fi(xi(t|k),ui(t|k))
(8)
(xi(t|k),ui(t|k))∈Xi×Ui,t=1,2,…,N
(9)
xi(0|k)=xi(k),xi(N|k)∈Xi,T,i=1,2,…,n
(10)

(11)
Ji(xi(k),ui(k))≤φi(xi(k),λi)
(12)

考虑车辆队列系统跟踪性能,定义单车稳定性目标函数为

(13)
式中:Ji(xi(k),ui(k))=xTi(N|k)Pixi(N|k)+∑N-1 t=0xTi(t|k)Qixi(t|k)+uTi(t|k)Riui(t|k);矩阵Qi=QTi>0,Ri=RTi>0,Li:Xi×Ui→Ξi和Ei:Xi∈Ξi是连续有界的,Xi和Ui为凸集。则求解优化问题为
问题2:
(14)
s.t.xi(t+1|k)=fi(xi(t|k),ui(t|k))
(15)
(xi(t|k),ui(t|k))∈Xi×Ui,t=1,2,…,N
(16)
xi(0|k)=xi(k),xi(N|k)∈Xi,T,i=1,2,…n
(17)
(18)
构造收缩约束函数,φi定义为

(19)

考虑问题1在k时刻可行,则根据滚动时域控制原理,控制律表达式为
(20)
(21)
具体步骤如下:
步骤1初始化(k=0)为
1) 在k=0时刻,车辆i(i=1,2,…,n)接收参考速度vdes,且φi(xi(k),λi)为无穷大。此时,第1辆车求解问题1,且不考虑约束式(11),并将求得的最优状态x*1,1(t|0)传递给后面所有跟随车辆i(i=2,3,…,n),并将最优控制输入序列作用到本车系统。
2) 对于车辆i(i=2,3,…,n)接收由第1辆车传递的状态x*1,1(t|0),t∈[0,N],此时求解问题1,并用约束为

(22)
步骤2迭代(k=1,2,…),每辆车执行过程为
1) 车辆i(i=2,3,…,n)接收来自与车辆i相互通信的车辆j(j≠i,j∈Ωi),所假设的状态信息。
2) 此时先求解问题2,用于更新φi(xi(k),λi),再求解问题1时,队列系统增加额外约束条件,对于第1辆车有

(23)
对于车辆i(i=2,…,n-1)有

(24)


3 稳定性与弦稳定
假设1在终端不变集Xi,T内存在局部控制律ui=κi(xi)满足κi(xi)⊂Ui和Ei(fi(xi,κi(xi))-Ei(xi)≤-Li(xi,κi(xi)),∀xi∈Xi,T。
引理1存在以下参数条件成立时,表达式为
(25)
则闭环系统位置误差满足式(11),其中参数(αi,εi-1,k,εi,k)∈(0,1)[16]。
定理1如果假设1成立,对任意给定λi≥0,优化问题1在Xi,N中满足递推可行性,进而Xi,N是闭环系统(21)的不变集。


(26)


(27)
对式(27)变换得

(28)
应用三角不等式和约束式(24)得

(29)
可见文献[13]引理3,并由初始化时刻约束式(22)得
(30)
根据式(27~30),并将式(28)代入式(29)得

(31)

(32)
把式(28)代入式(32)可得

(33)
得不等式(33)有界,且满足

(34)

(35)
考虑控制序列(26),可得

(36)
根据式(35)和假设1,式(36)化简可得

(37)
定理2如果假设1成立,且问题1在初始时刻存在可行解,则对给定λi∈[0,1),则xi,s是闭环系统式(21)在Xi,N内渐近稳定平衡点,且Xi,N是车辆i闭环系统的一个吸引域,XN=X1,N×X2,N×…×Xn,N为整个车队闭环系统的一个吸引域,且若约束式(22~24)成立,则车队系统满足弦稳定。
证明对任意给定λi∈[0,1)优化问题在初始时刻是可行的,根据定理1可知该优化问题在k时刻存在可行解。

(38)
将式(37)代入式(38),并考虑假设1,整理得
(39)
由于λi∈[0,1),且Li(xi,ui)为正定函数,所以值函数沿着闭环系统(21)的轨迹是严格单调递减的。又因为Ji(xi,ui)是平衡点的正定函数,从而平衡点是闭环系统式(21)在Xi,N内渐近稳定平衡点。Xi,N是车辆i闭环系统的一个吸引域,同理可得XN则是整个车辆队列闭环系统的一个吸引域。
问题1在任意时刻存在可行解,且闭环系统式(21)关于平衡点渐近稳定。由上述优化问题可行推导过程可知,联立式(22~24),满足不等式(4),因此可建立闭环系统的弦稳定。
4 仿真验证与结果分析
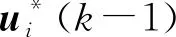
为验证笔者控制策略可在任意混杂通信拓扑结构下车队系统满足稳定性,实现一致性稳态,同时使得车队系统在运动过程中满足队形约束,保持安全车间距离,达到控制性能。利用7辆同质车组成的车队,验证笔者策略有效性,其中混杂通信拓扑如图1所示。
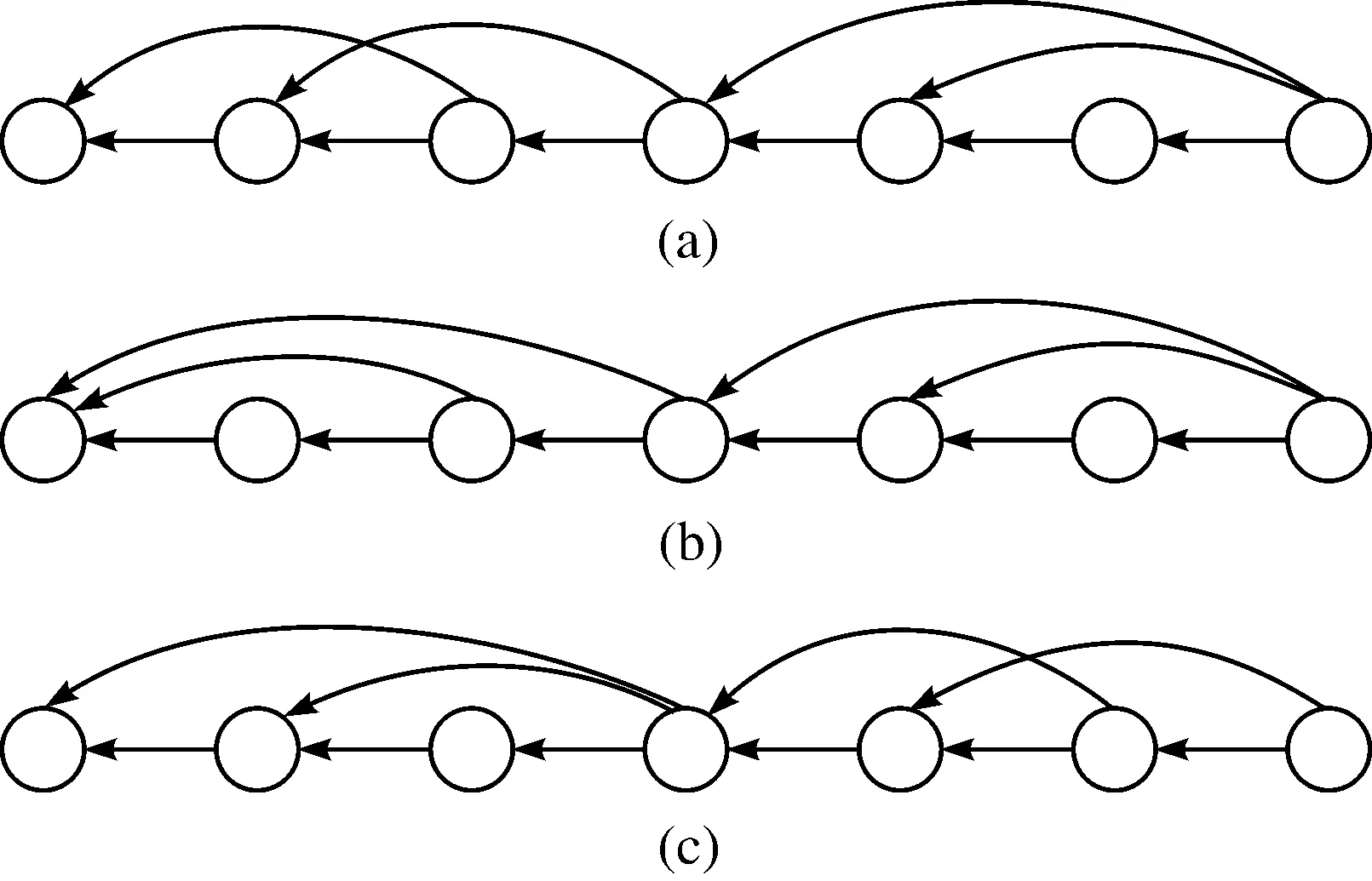
图1 混合通信拓扑Fig.1 Mixed communication topologies
优化问题预测时域N=12,算法中初始时刻k=0,期望速度vdes从19 m/s增加到20 m/s,车队跟踪新的期望速度,确保安全车间距离,直到速度误差为0,车队中各车速度相同,且相对期望位置误差为0。在k=0时,各车相对位置误差为0,速度误差为-1 m/s。式(13)和式(6)中惩罚权重取值分别为Qi=diag(0.5,2),Ri=1×10-5,Fi=[2,0;0,2],Gj=[2,0;0,2];车辆参数选取为mi=1 035.7 kg,Ci=0.99 N·s2·m-2,ri=0.30 m,μi=0.015 5,ηi=0.965,i=1,…,7。控制输入ui的最小值和最大值分别为umin,i=-3 500 N,umax,i=3 500 N,其体现加速度取值,收缩函数(10)中λi=0.8。
系统(1)在平衡点(xi,s,ui,s)处线性化模型求解LQR问题得终端罚函数Ei(xi)=(xi-xi,s)TPi(xi-xi,s)和局部控制器κi(xi)=Ki(xi-xi,s)+ui,s,其中平衡点为(xi,s,ui,s)=(0,0,48.908 7),终端域、矩阵和增益分别为Xi,T={xi∈Ξ2:Ei(xi)≤0.154},Pi=[9 054.705 7,432.710 8;432.710 8,42.313 0],Ki=[134 573.070 9,13 159.336 0]。
4.1 车队一致性控制比较
在图1(a)通信拓扑下,首先考虑一致性目标函数式(6),求解问题1用C-MPC表示。应用笔者所提控制策略,求解双层优化问题记为DH-MPC,其中优化问题约束为式(8~11),参数选取同上文所述。对7辆车组成的车队进行比较仿真。C-MPC与DH-MPC状态曲线变化如图2所示。由图2可知:当只考虑动态一致性目标(C-MPC)时,车队系统出现失稳问题,未能满足跟踪稳定性,且状态未达到一致稳态。而笔者提出的分布式双层策略(DH-MPC)使得车队系统实现跟踪稳定,状态收敛于一致性稳态,且在车队行驶过程中满足队形关系,即弦稳定,同时车辆间保持安全间距,有效地实现车队协同控制。
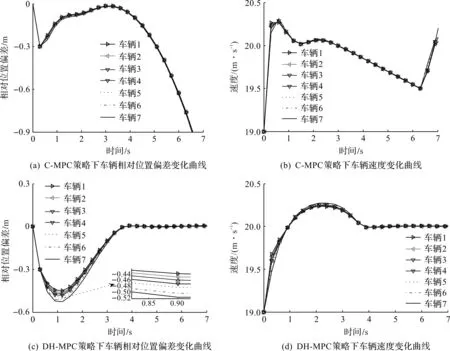
图2 C-MPC与DH-MPC状态曲线变化Fig.2 State curves of C-MPC and DH-MPC
4.2 车队一致性控制
为了验证分布式双层策略在任意通信拓扑下使闭环车队系统式(21)满足跟踪稳定性和状态一致性,并实现车队协同控制,考虑图1(b,c)两种混合通信拓扑,仿真结果如图3所示。
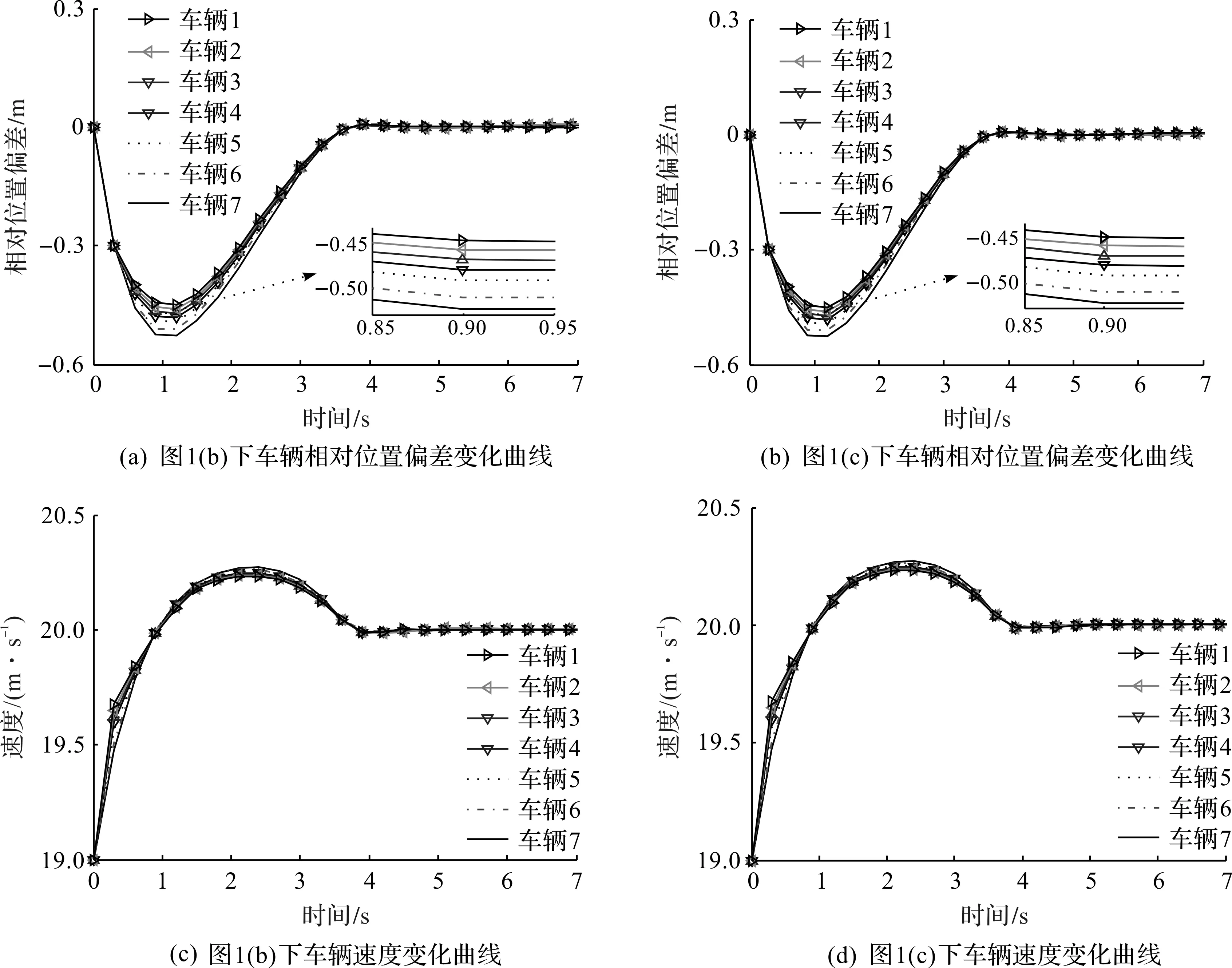
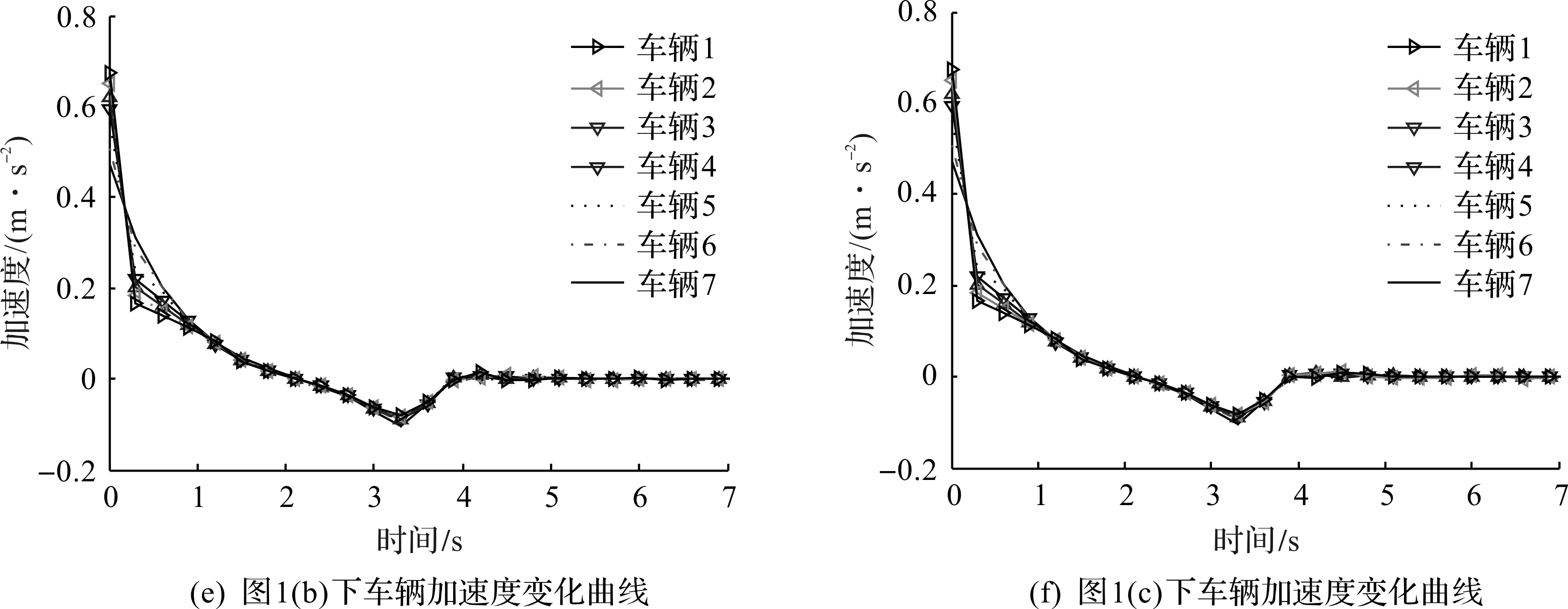
图3 每辆车状态曲线Fig.3 State curves of each vehicle
由图2,3可知:在3种混合通信拓扑下车队系统满足跟踪稳定,各辆车具有相同的速度,相对位置偏差最终收敛于0,实现状态一致性,并收敛于稳态,且在行驶过程中满足弦稳定,车辆间满足安全间距,实现协同控制。同时加速度与车辆速度相对应,并在安全范围内。
5 结 论
首先在任意通信拓扑下,针对具有状态和控制约束的非线性车队系统协同一致性稳态问题,提出了混合通信拓扑分布式双层控制策略;然后通过构造收缩约束使跟踪稳定性和动态一致性目标相关联,并应用MPC三要素法和滚动时域建立了车队系统稳定性和优化问题递推可行性的充分条件;最后数值仿真验证了所提策略可使车队在任意通信方式下满足跟踪稳定性,车辆间保持安全间距,且状态收敛于一致性稳态,车队达到相应控制性能,实现协同控制。笔者研究为大型车队系统的研究工作提供思路和参考,后续可进一步深入学习和研究。
猜你喜欢
当代水产(2022年7期)2022-09-20
计算技术与自动化(2022年2期)2022-07-04
军民两用技术与产品(2022年3期)2022-06-05
汽车实用技术(2022年9期)2022-05-20
纺织服装周刊(2022年16期)2022-05-11
物流科技(2022年2期)2022-05-07
汽车工程(2021年12期)2021-03-08
疯狂英语·新悦读(2021年1期)2021-01-27
科学导报·学术(2020年26期)2020-10-21
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
