应用坐标变换简化有限元建模的方法
2022-09-21 00:25石永燕
山西建筑 2022年19期
石永燕
(招商局重庆公路工程检测中心有限公司,重庆 400067)
如今ANSYS,Midas Civil,Adina等有限元软件的发展,使得大规模复杂结构的数值分析成为可能。在结构有限元分析中,相当一部分时间用于建立几何模型,这在建立复杂实体单元模型时尤为明显。有限元程序虽都提供了用户界面建立实体单元模型的方法,但往往功能有限,建立简单的模型比较容易,要直接建立一个复杂的几何模型仍然是比较困难的事情。因此,有必要研究快速地建立复杂的有限元几何模型的方法。
实际上简单几何模型和复杂几何模型的主要区别在于单元的节点坐标不同,其单元编号和节点连接可保持不变。因此,可试图将简单的有限元几何模型通过一系列的变换逐渐转化成复杂的几何模型,其关键是如何实现节点坐标的转换。
1 坐标基本变换[1]
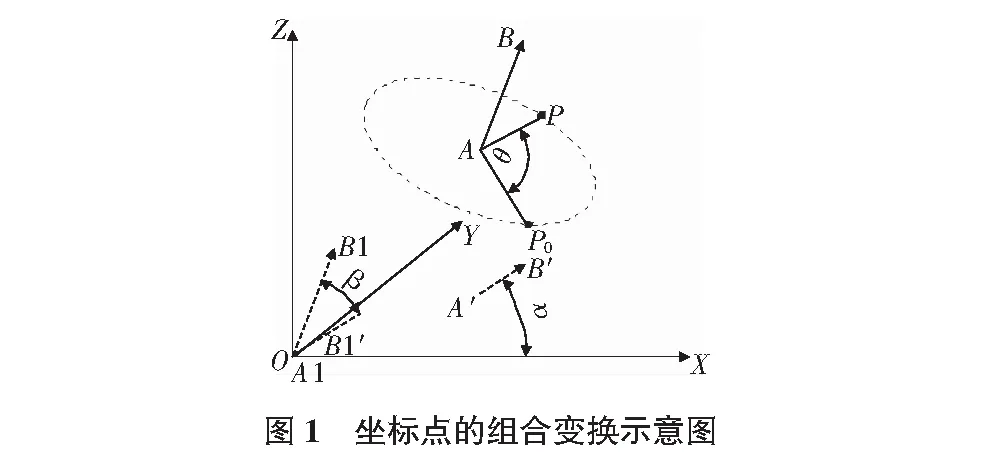
复杂的几何变换可以通过一系列的基本变换得到。为便于统一以矩阵形式表示变换过程,可将3维点P扩展为4维点,令P0=P(x0,y0,z0,1),P1=P(x1,y1,z1,1)。下面分别给出坐标平移变换、比例变换、旋转变换的基本方法。
1.1 坐标平移变换
将点P0(x0,y0,z0,1)平移(dx,dy,dz,0)得到P1(x1,y1,z1,1)的变换方法如下:
x1=x0+dx,y1=y0+dy,z1=z0+dz,1+0=1。
变换过程写成矩阵形式为:
[P1]=[P0][Tp]
(1)

1.2 坐标比例变换
将点P0(x0,y0,z0,1)按因子(kx,ky,kz,1)缩放得到P1(x1,y1,z1,1)的变换方法如下:
x1=x0kx,y1=y0ky,z1=z0kz,1×1=1。
变换过程写成矩阵形式为:
[P1]=[P0][Tk]
(2)

1.3 坐标旋转变换
将点P0(x0,y0,z0,1)绕Z轴在X-Y平面内旋转θ角得到P1(x1,y1,z1,1)的变换方法如下:
x1=x0cosθ+y0sinθ,y1=-x0sinθ+y0cosθ,z1=z0,1×1=1。
变换过程写成矩阵形式为:
[P1]=[P0][Tz]
(3)

将点P0(x0,y0,z0,1)绕Y轴在Z-X平面内旋转θ角得到P1(x1,y1,z1,1)的变换方法如下:
x1=x0cosθ-z0sinθ,y1=y0,z1=x0sinθ+z0cosθ,1×1=1。
变换过程写成矩阵形式为:
[P1]=[P0][Ty]
(4)
将点P0(x0,y0,z0,1)绕X轴在Y-Z平面内旋转θ角得到P1(x1,y1,z1,1)的变换方法如下:
x1=x0,y1=y0cosθ+z0sinθ,z1=-y0sinθ+z0cosθ,1×1=1。
变换过程写成矩阵形式为:
[P1]=[P0][Tx]
(5)
2 组合变换
坐标在几何空间中的复杂变换,均可通过上述基本变换得到,通过上述基本变换式(1)~式(5)可以派生出各种复杂的几何变换。

4)通过旋转变换Tx将P3绕X轴旋转θ角,记为P4。

(6)
3 坐标映射变换
设有曲线段S及S上一点Ps,规定Ps到S起点的距离与S长度之比Rs为Ps的相对坐标。直线段为特殊的曲线段,设直线段上一点P1的相对坐标为R1,如果R1与曲线S上点Ps的相对坐标Rs相等,则称Ps为P1在S上的映射点。坐标点的映射变换示意图如图2所示。
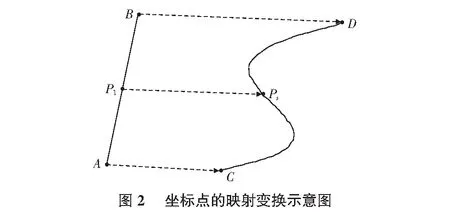
根据映射的定义,显然直线段L上任意一点P1,在曲线段S上都有一对应的映射点Ps。直线段L的起点和终点分别对应曲线段S的起点和终点,直线段上的N等分点则对应曲线段上的N等分点。通过这样处理,可将直线坐标系的点映射到曲线坐标系中。在此称这种变换为映射变换。
对于给定点的相对坐标,若不便于用解析方法计算曲线S上映射点的坐标值,则可采用数值方法计算曲线上映射点具体坐标。具体过程为:首先计算点P1在直线上相对坐标R1,将映射曲线S根据计算精度要求等分成足够多的N段,逐一计算各分段点的相对坐标值。然后查找到R1所属的分段,此时可近似将曲线上的分段视为直线段,用分段点的两端点坐标根据R1值即可插值计算出映射点的具体坐标。实际应用时,需考虑关键点在直线和曲线上逐一对应,关键点之间则应用插值映射变换。
4 有限元模型通过坐标变换的建模实例
下面分别以Midas Civil和ANSYS为例来说明在有限元软件中快速建立复杂几何模型的方法。例1:某桥梁为30 m+35 m+30 m的空心板梁桥,平曲线半径为200 m,桥面横坡由1%逐渐变化到2%,竖曲线在R=1 000 m 的弧线上。例2[2]:万县长江大桥为主跨420 m的拱桥,拱圈为箱型截面,宽16 m,高7 m。若用常规方法建立有限元几何模型,其工作比较烦杂,尤其是在ANSYS中如果出错后修改较困难。
Midas Civil中建立此弯坡斜桥有限元几何模型的过程如下:
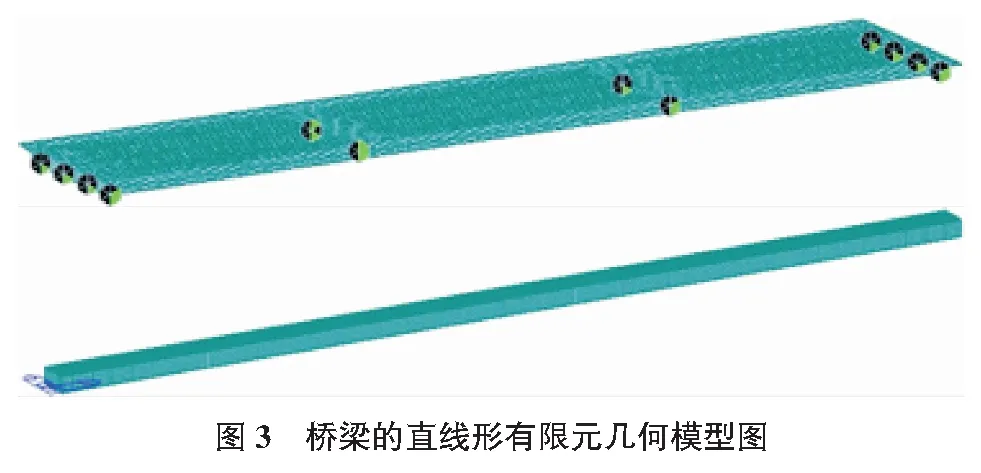
1)用Midas建立直线形有限元模型(见图3)。根据设计图纸,先建立沿其桥轴线或拱轴线展开的直线形模型(梁桥:61 538个节点,41 808个单元;拱桥:74 370个节点,38 091个单元)。
2)在Midas Civil中导出直线桥模型的MCT文件,提取MCT文件中的节点坐标信息。
3)对提取的节点坐标利用前述变换进行几何变换,具体方法为:首先定义直线形桥梁中心线为后续操作的导向线。对直线形桥导向线按照曲线桥梁的桥轴线方程进行映射变换,再对直线形桥模型的各节点按照其相对于导向线的几何位置,按照前述方法进行坐标变换。
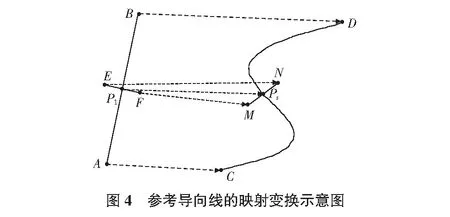
设E,F在导向线上的投影点为P1,Ps为点P1在曲线形桥轴线上的映射点,映射后图中点M,N相对于曲线形桥轴线点Ps的几何位置与E,F点相对于导向线上P1点的几何位置保持相同,即都垂直于导向线,示意图如图4所示。
4)将变换后的节点坐标替换到Midas Civil软件的MCT文件中的对应位置,然后在Midas Civil中导入MCT文件,则直线形桥有限元模型将变成弯坡斜桥的有限元模型。
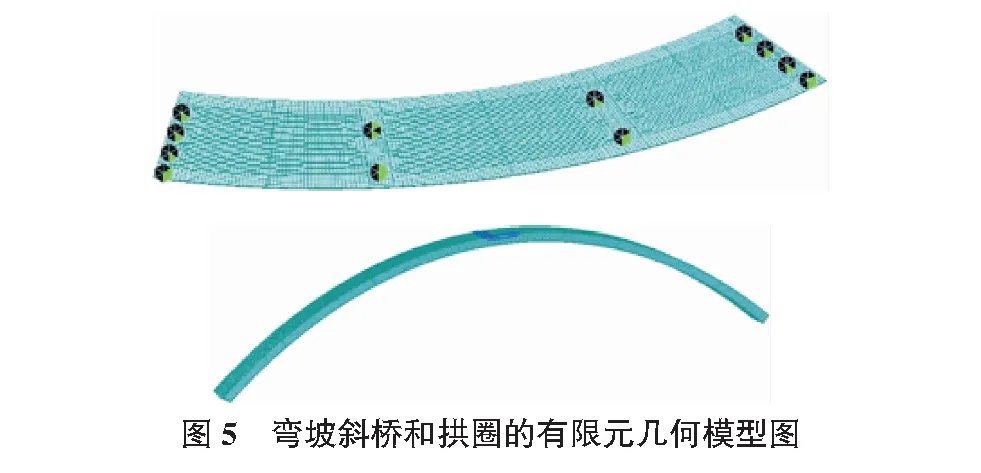
直线形桥模型经过轴线弯曲(映射变换),旋转(M,N绕Z轴旋转变换)、扭转(绕X轴旋转变换)一系列变换后即可成为弯坡斜桥和拱圈的有限元几何模型,其结果如图5所示。
ANSYS中建立复杂弯坡斜桥的过程与在Midas Civil中的方法相似,区别在于提取直线桥有限元模型的节点坐标需使用一定的代码。ANSYS中建立弯坡斜桥有限元几何模型的主要过程如下:
1)先建立直线桥模型。
2)在直线桥模型中提取节点坐标信息,可用如下APDL代码[3]。
*GET,N_NUM,NODE,0,COUNT
*DIM,XN,,N_NUM
*DIM,YN,,N_NUM
*DIM,ZN,,N_NUM
*DIM,NN,,N_NUM
*DO,I,1,N_NUM
NN(I)=I
XN(I)=NX(I)
YN(I)=NY(I)
ZN(I)=NZ(I)
*ENDDO
/OUT,NODE,TXT
*VWRITE,N_NUM
(F5.0)
*VWRITE,NN(1),XN(1),YN(1),ZN(1)
(f5.0,F15.5,F15.5,F15.5)
/OUT
3)对提取的节点坐标用前述方法进行几何变换,变换成需要的模型。
4)在ANSYS中重新生成节点。可用“N,K,X,Y,Z”命令对所有节点进行循环即可。
在桥梁设计中,如对建立的有限元几何模型不满意,还可以简单地按照控制参数如平弯半径、竖弯半径,桥面横坡等对直线桥有限元模型的节点坐标重新变换后,再导入Midas Civil或ANSYS中即可迅速得到弯坡斜桥梁模型。直线桥模型可不断调整参数,建立各种复杂的弯坡斜桥梁模型。
5 有限元模型几何坐标变换小程序
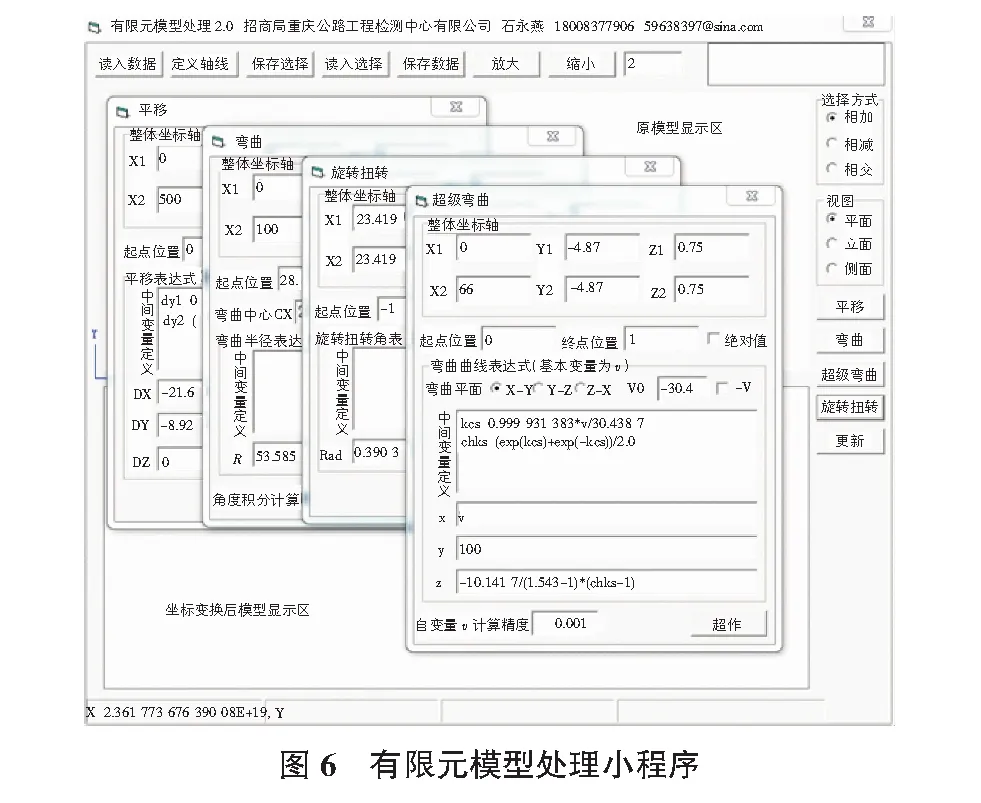
笔者根据本文方法,编制了有限元模型几何坐标变换的实用小程序,主要的功能有定义导向线,坐标线性平移、弯曲、旋转和扭转等功能。小程序以参数化形式定义控制参数,计算精度可调,导向线上的点可使用相对坐标或绝对坐标,能适应绝大多数的模型处理情况。笔者在建立万县长江大桥(420 m拱桥)主拱圈的船撞有限元实体模型时,先建立了直线形的主拱圈模型,然后在小程序中设置主拱圈的悬链线参数后,小程序就将直线形模型的节点坐标变换为悬链线主拱圈模型的节点坐标(见图6)。
6 结语
1)本文逐一建立了坐标基本变换的变换矩阵,并说明了坐标组合变换的具体过程。
2)提出了映射变换的概念及其数值方法的实现过程。
3)通过对节点坐标进行一系列的基本坐标变换和映射变换,可以将简单的有限元模型转换成弯、坡、扭等复杂的有限元几何模型。复杂的有限元几何模型的建立转化成了简单几何模型的建立,这样可简化建模过程,取得事半功倍的效果。
猜你喜欢
作文成功之路(高考冲刺)(2022年8期)2022-11-21
广东土木与建筑(2022年2期)2022-03-11
当代陕西(2020年23期)2021-01-07
航天工业管理(2020年3期)2020-07-25
铁道建筑技术(2020年11期)2020-05-22
小学生导刊(2018年13期)2018-11-30
筑路机械与施工机械化(2018年6期)2018-08-28
小学生导刊(低年级)(2017年2期)2017-06-10
北方交通(2016年12期)2017-01-15
小猕猴智力画刊(2016年12期)2017-01-05