红外低轨星座突发任务多重策略调度方法
2023-01-12 11:48张晟宇朱振才胡海鹰
北京航空航天大学学报 2022年12期
张晟宇, 朱振才, 胡海鹰
(1. 中国科学院微小卫星创新研究院, 上海 201203; 2. 上海微小卫星工程中心, 上海 201203;3. 中国科学院大学, 北京 100039)
红外低轨星座是通过全球组网,协同工作完成对空间高动态时敏目标实时探测发现、跟踪定位的复杂系统。 星座需要对全球范围目标出现的空域进行二重覆盖,并在目标出现之后快速响应形成观测资源对目标的分配。 由于目标有其不可预见性与随机性,针对目标任务的观测任务具有突发性,突发性任务具有输入精度低,捕获窗口短的特点,突发任务对于全球覆盖的星座提出高时效响应的要求,需要快速地选出执行任务的卫星来完成观测。
针对事件快速响应的方法研究方面,现有的研究主要针对如何动态地进行已有规划方案的调整与重规划[1-2],陈书剑等[3]提出了结合观测路径的突发任务响应时间最优的多星成像规划方法,在向全局优化的同时进行时效性的增强。
星座的任务响应需要同时考虑单星观测任务的规划及多星之间的协同。 贺仁杰等[4]提出了通用的成像卫星规划模型。 文献[5-7]针对不同方面的单星规划问题提出了启发式、基因算法等。
同时红外低轨星座调度还需要卫星开展协同规划。 姜维等[8]提出了通用的协同规划模型,文献[9-10]根据具体问题提出了超启发等多种算法。
红外低轨星座资源调度问题是一个复杂时空观测资源动态分配问题,文献[11-12]提出了包括基于补偿跟踪的低轨预警资源调度方法。 这些方法都针对红外低轨星座中的一些特定的问题提出解决方案,但面向全球的实时响应调度方面,尚没有结合红外低轨星座的特点提出突发任务调度方法。 现有方法多采用直接进行全局优化。 红外低轨星座卫星数量较多,当目标数量较大时,难以满足系统实时任务响应的要求。 因此,本文提出一种多重策略下的星座突发任务快速优化策略,对目标观测的分析结合红外星座的轨道特性开展,可以提高系统对突发任务的响应能力。
1 红外低轨星座特性分析
红外低轨星座的设计目标是构建一个面向全球分布的时敏动态多目标进行协同观测的系统。星座的设计要满足对于全球空域空间时敏目标立体观测与组网通信的要求。 因此,对于目标空域的全球二重覆盖及保持星座整网联通的要求是星座设计的主要目标[13-15]。
1.1 空域覆盖能力分析
空域覆盖能力的主要约束包括临边观测约束及最大探测距离约束。 如图1 所示。

图1 红外低轨星座空域覆盖示意图Fig.1 Schematic of infrared LEO constellation spatial coverage
卫星需要在深空背景下观测目标,即卫星与目标的连线应高于大气临边的高度Ha。 卫星的红外载荷探测能力是有限的,最大的探测距离为L。
红外低轨星座为了获得目标的位置与运动信息,需要同时为1 个目标分配至少2 颗卫星的观测资源。
空间动态多目标的立体定位任务是系统的核心任务,立体观测也是基础的协同模式。 立体观测由2 颗卫星同时对目标进行观测。 在这个过程中,一颗卫星通过星间链路向另外一颗卫星发送自身的位置速度信息、传感器的指向信息及标在图像像面上的位置信息。 接收卫星通过计算本星和协同卫星的运动信息、目标测量信息完成对于目标的定位。 立体定位的工作模式如图2 所示。
图2 中,Sat1 和Sat2 为对目标构成立体观测的2 颗卫星。 由Sat1 和Sat2 指向目标的视线LOSsat1和LOSsat2构成了立体观测角。 Sat1 和Sat2之间通过星间链路(ISL)进行通信,通过交互自身运动信息及目标测量信息完成对目标的立体定位。

图2 立体观测工作模式Fig.2 Stereo observation mode
为了进行全球覆盖将临边约束和最大观测距离投影到地球表面。 其中由临边约束产生的不可见区域是以星下点为中心,弧段Db(Ht)为半径的圆形区域。 其中Ht为目标的高度,因此,这个圆形区域的大小是变化的,由目标分布的上下边界决定。 不可见弧段长度Db(Ht)为Db(Ht)=

式中:Re为地球半径;Hs为卫星高度。
同样,最大观测距离到地面也产生一个半径为D(Ht)的圆形区域。 最大探测弧段为

以星下点为中心,最大可观测距离去除不可观测范围获得1 个环带区域,环带的宽度为

式中:Dl为可见投影弧段。
投影到地面的覆盖示意图如图3 所示。 其中蓝色部分为卫星的单重覆盖区域,红色为空域的二重覆盖区域,星下点的中心区域未被覆盖的部分代表盲区。 覆盖的投影大小随着目标高度的分布不同而变化,目标高度越低则盲区越大,目标高度越接近卫星的高度则覆盖区域越大。

图3 空域覆盖地面投影示意图Fig.3 Terrestrial projection of spatial coverage
从红外低轨星座的观测特点出发,结合全球覆盖特性的要求,适合选用Walker 星座构型。 其中Walker 星座δ 构型具备较好的覆盖特性。Walker-δ 的特点是由多颗高度相同,倾角相同,轨道面之间升交点均匀分布,轨道面内卫星的相位也均匀分布的一种星座。 常用T/P/F来表示其构型,其中T为卫星总数,P为轨道面的数量,F为相邻轨道面间的相位差[16-17]。
结合对于红外低轨星座覆盖能力的分析,可以进行红外星座规模的分析与设计。 将观测能力投影到地面分析覆盖特性。 覆盖分析如图4所示。
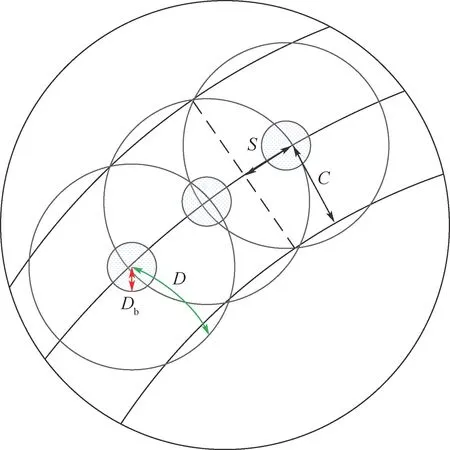
图4 星座的覆盖投影分析Fig.4 Project analysis of spatial coverage
卫星在一个轨道面中均匀分布,在轨道面内星间的半间距S决定了一个轨道面内所需卫星的数量N,轨道面半覆盖宽度C决定了所需轨道面的数量P。 轨道面和轨道面中卫星数量为

式中:D为最大探测距离投影弧段长度。
1.2 通信约束分析
星座的设计还要考虑到星座可以实时保持网络联通性能。 因此,需要考虑星间链路的约束,如图5 所示。

图5 星间链路示意图Fig.5 Inter satellite link
2 颗卫星的星间地心角θISL和卫星的高度Hs决定了2 颗卫星的通信距离。 同时卫星之间为了降低链路的损耗,需要避免穿越大气,需要考虑链路保护高度Hc。 星间通信最大地心角和传输距离的计算如下。
星间通信最大地心角为

传输距离为

因此,轨道面内卫星数量N也需要满足:

同时要求2 个轨道面之间至少有1 对卫星可以跨轨道面组链路(inter orbit ILS,IOL),因此,轨道面之间卫星的最小地心角应小于轨道面内的最大地心角:

1.3 星座设计结果
星座设计输入如表1 所示。 在表1 的输入条件下,基于双重约束的星座优化分析,200 ~2 000 km的空域实现二重覆盖,至少需要28 颗卫星,在200 km 处实现绝对的二重覆盖,卫星的数量需要增加,采用32 颗卫星的设计二重覆盖则接近99.99%。 因此,选择4 个轨道面,每个轨道面8 颗卫星,总共32 颗卫星组成的Walker 星座作为设计结果,采用32/4/1/1 600 km/60°的星座构型。 星座内种子卫星Satellite1 的初始轨道参数如表2 所示。
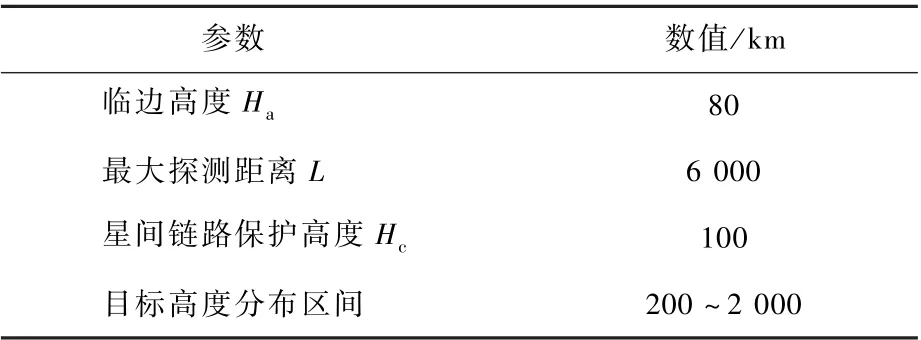
表1 仿真参数设置Table 1 Simulation configuration parameters
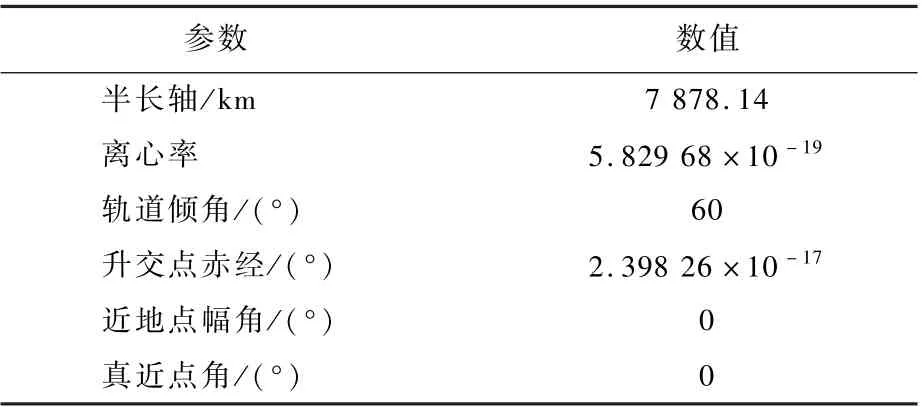
表2 卫星Satellite1 轨道参数Table 2 Orbital parameters of Satellite 1
倾斜轨道Walker 星座的空间几何关系具有高度动态性,但经分析, 红外低轨星座具备空间结构稳定性的特点,主要体现在:轨道面的数量及轨道面的倾角是固定的;轨道面内的卫星数量及卫星之间的相位间隔,在一般情况下也是固定的;虽然在全球的分布状态是动态的,但总体保持较为均匀的分布;虽然卫星运动高度动态,但卫星之间的相对位置关系变化具有很高的周期性。
因此,对于红外低轨星座的管理与调度需要充分考虑其空间中星座的均匀性、对称性及变化规律周期性的特点,对于星座管理与星座特性的分析,Chen[18]、Rossi[19]等分别进行了相关的星座构型维持及星座安全方面的研究。
2 多重策略任务应急调度方法
2.1 突发观测任务问题建模
2.1.1 问题模型
红外低轨星座对于突发任务调度的问题,是一个具有时间和空间复杂性的观测资源动态分配问题。
为了完成观测资源的分配需要进行主要的计算过程,首先是可见窗口AW 的计算,进行n颗卫星Sat ={Satj}与m个目标Tar = {Tari}之间所有可用观测窗口的计算,获得可见窗口集合AW ={}。 在完成可见窗口计算后,根据系统的任务目标Objectives ={objd},如对多目标定位或对高优先级目标定位,进行任务Tasksys= {}的分配。 由于卫星的资源Sat = {Satj}有非常强的可替代性,在资源的优选过程中,需要卫星特性及任务特性相关的策略Strategies ={strar}来支撑调度方案Scedule ={}的快速生成。为一个M×K的任务分配矩阵,表示t时刻对m个待观测目标分配k颗卫星作为观测资源。 总结以上关系,有简化的系统任务规划与调度模型如下:

2.1.2 目标变量
目标Tari包含的信息如下:

式中:IDi为目标的系统编号;wi为目标的系统权重;sti为开始时间;eti为结束时间;periodi为周期;positioni为目标位置信息;velocityi为目标速度信息。
2.1.3 卫星资源变量
对于卫星Satj:

式中:SCIDj为卫星的编号;Rolej为卫星在系统任务中承担的角色,可以为主星或从星;Statusj为卫星的工作状态;为Satj正在承担的任务;Anglej为当前的卫星载荷空间指向角度;Positionj为卫星位置;Velocityj为卫星速度;WrokTimej为卫星还可工作的时间长度。
2.1.4 可见窗口变量

2.1.5 任务决策变量
在完成任务规划后,生成规划执行窗口集合:


2.2 目标函数
为了简化问题,在调度过程中,主要考虑2 颗卫星同时可以观测目标才满足要求,每个传感器1 个时间段只能观测1 个目标。 优化目标时主要考虑2 个目标:选择较长的观测弧段;尽早开始观测。
目标函数:
式中:wp为观测时间的权重;wst为开始时间的权重。
约束条件:如观测组合为(Satn,Satm),则
决策变量:
2.3 红外低轨星座针对突发任务的多重策略研究
2.3.1 突发任务决策需求与流程分析
红外低轨星座的决策与任务调度需要一个从全局到区域,由区域分配到具体的执行卫星,再根据执行卫星的执行结果调整调度方案。
红外低轨星座在突发任务出现后,启动决策与任务规划调度。 在全局层面首先需要解决任务的分配问题。 在任务的分配中,需要决定将哪些任务分配给哪些卫星执行。 全局初始分配阶段,根据目标的数量、优先级和预测轨迹激活卫星的分组策略,决定对每个目标需要哪些卫星,以及这些卫星如何分配到不同的分组中。 这个阶段的决策调度属于匹配型的调度,是一个任务在多个资源中选择合适的资源。
激活分组策略后,形成了针对每个任务的分组,主星启动任务规划与调度会出现1 颗卫星在任务时间段内具备对多个任务的执行能力,尤其是在多个任务分配到1 个分组后,卫星资源已经无法满足对所有任务的执行,卫星资源需要优先执行高优先级的任务,并通过合理的任务执行排序,获得较大的任务执行收益,因此,组内的任务规划与调度属于次序型调度问题,优化每个任务的资源分配及分配次序。
主星完成了任务规划与调度,并将任务分配到执行卫星后,卫星开始对目标进行观测,并生成观测结果,结果反馈到主星,主星需要通过任务的完成情况,如预期时段卫星未完成对目标的观测,或者提取完成对目标的观测等情况下决策是否进行重新规划,以及在目标的轨迹进入其他分组的观测范围后,主星向全局决策反馈全局重调度需求。 全局决策层若认为需要重调度,则将该执行结果作为新事件进行新一轮的调度。
全局决策主要解决任务分解的问题,是将Tasksys拆解为Taskgroup,主要对Tasksys中的目标Tari= {IDi,wi,sti,eti,periodi,positioni,velocityi}进行分配。 全局决策问题是解决将哪些任务分配到哪些资源的过程,不需要进行具体观测窗口的计算。 因此,全局决策的实质是将任务分配到区域分组中的过程。
全局策略包含2 层策略:全球分组策略和任务分配到组策略。
全球分组策略中,需要解决的问题是如何对任务进行快速响应。 现有的初始分组策略研究,需要星座中全部卫星与全部目标的可见性计算,在通过约束与优化目标对适合观测的卫星进行优化排序。 计算过程复杂,且未充分考虑目标在时间与空间的分布特性,以及红外低轨星座的对称性与运行过程的周期性。
在分组的策略上存在2 种典型的方法,一种是固定分组,另一种是动态分组。 这2 种分组策略都有各自的特点。 固定分组,分组中卫星之间主从关系是固定的,组内卫星的数量是固定的,因此一个分组拥有的观测资源也是固定的。 但是红外低轨卫星与目标都处于高速运动状态,固定分组难以适应快速的空间拓扑变化,因此,固定分组策略在红外低轨星座中是不适用的。 动态分组指组内的成员和主从关系是动态调整的,这样的分组策略可以较好地适应动态的相对观测关系。 由于目标的出现具有不确定性,对任务又要求快速的响应能力,因此,在动态分组策略下又进一步细分,提出一种兼顾固定分组优势的区域动态分组策略,该策略采用地理区域固定的方式来适应目标出现的区域性,通过全球的区域划分后,目标出现在任何区域都有观测对应的分组可以快速响应,同时1 个区域中的卫星数量与卫星关系在1 个时间段内较为稳定。
针对出现在多个区域交界处并在飞行过程中跨越多个区域的目标,提出一种围绕目标的快速分组策略,围绕目标的飞行轨迹来选择动态分组的卫星,该策略可以较好地适应目标观测,但计算开销较大,且分组动态性较高,本文提出一种基于多重策略的红外低轨星座任务应急调度方法。 主要采用全球分区管控值守分组策略与基于相对运动分析的动态快速分组策略相结合的方法来提升对于突发事件的快速响应能力。
2.3.2 全球分区管控值守分组策略
根据星座内卫星的分布特性,虽然卫星处于高度动态的过程,但是选取合适的空间范围后,处于空间范围内的卫星数量是相对固定的,而且出入区域的时间也具有很高的周期特性。
因此,在红外低轨星座中采用一种长期在轨维持的分组策略。 将经度宽度为90°,纬度宽度为90°的1 个区域划分为1 个值守区域,进入该区域的卫星动态组成分组。 这样在全球范围内划分出8 个值守区域,获得8 个分组。 分组集合为

对于每个分组包含的变量为

式中:na 为区域编号,取值在1 ~8 之间;Satna为组内卫星集合;Tarna为分配给该组的目标集合;Lna为组内主星;Fna为组内从星。
区域分组如图6 所示。

图6 全球分区示意图Fig.6 Global surveillance area
对于4 个分区交接的区域,组间在这些区域切换频繁,因此,针对正对赤道上经度0°、90°、180°、 -90°的4 个区域交点为中心,设立4 个经纬度宽度为20°的冲突区。 如果目标落入冲突区,则触发动态快速分组策略。 动态快速分组共4 个触发区域,分组集合为

2.3.3 基于相对运动分析的动态快速分组策略
基于相对运动分析的快速动态分组策略,主要为了解决2 个问题:①在4 个区域交界处的分组冲突问题,因此在目标出现前,该策略不激活;②解决在目标落入该区域后如何快速组成观测组的问题。
在动态快速分组策略中,轨道的固有特性依然是分组策略制定的重要依据。 由于Walker-δ星座中多个轨道面的升交点经度ΩA在赤道上也是均匀分布的,因此,可以将不同轨道面按照升交点经度与冲突区的距离关系,将其分配到动态冲突区中。 由于轨道面的对称性,需要同时考虑轨道面的降交点经度ΩD。 通过计算来选取距离分区最近的轨道面。 其中,为冲突区的中心经度,Ωcentral为轨道面的升交点经度或降交点经度的中心经度。 这是由于一个轨道面的所有卫星的升交点经度都分布在一个宽度为RΩ的经度区间里:

式中:Top为该轨道面的轨道周期;ωe为地球速度。
因此,每个分组包含的变量为

式中:ca 为区域编号,取值在1 ~4 之间;Satca为组内卫星集合;Tarca为分配给改组的目标集合;Lca为组内主星;Fca为组内从星;ΩA为最近的升交点经度所处轨道面编号;ΩD为最近的降交点经度所处轨道面编号。
选定轨道面后,需要进一步选择轨道面上的卫星组成分组。 本文采用基于相对运动分析选取原则。 在获得目标的位置和初步的运动速度信息后,计算目标与卫星的相对运动角度并设计相对角度影响因子,依据目标与卫星的距离设计相对距离影响因子,以及由目标高度生成半径为Db(Ht)的不可观测区域影响因子,从而形成基于相对运动分析的轨道面内选星因子为

式中:wra、wdis、wbd分别为对应相对角度影响因子、距离影响因子和不可观测区域影响因子的权重。
2.4 调度方案求解过程
基于多重策略的调度流程如图7 所示。 调度方案的具体执行步骤如下:
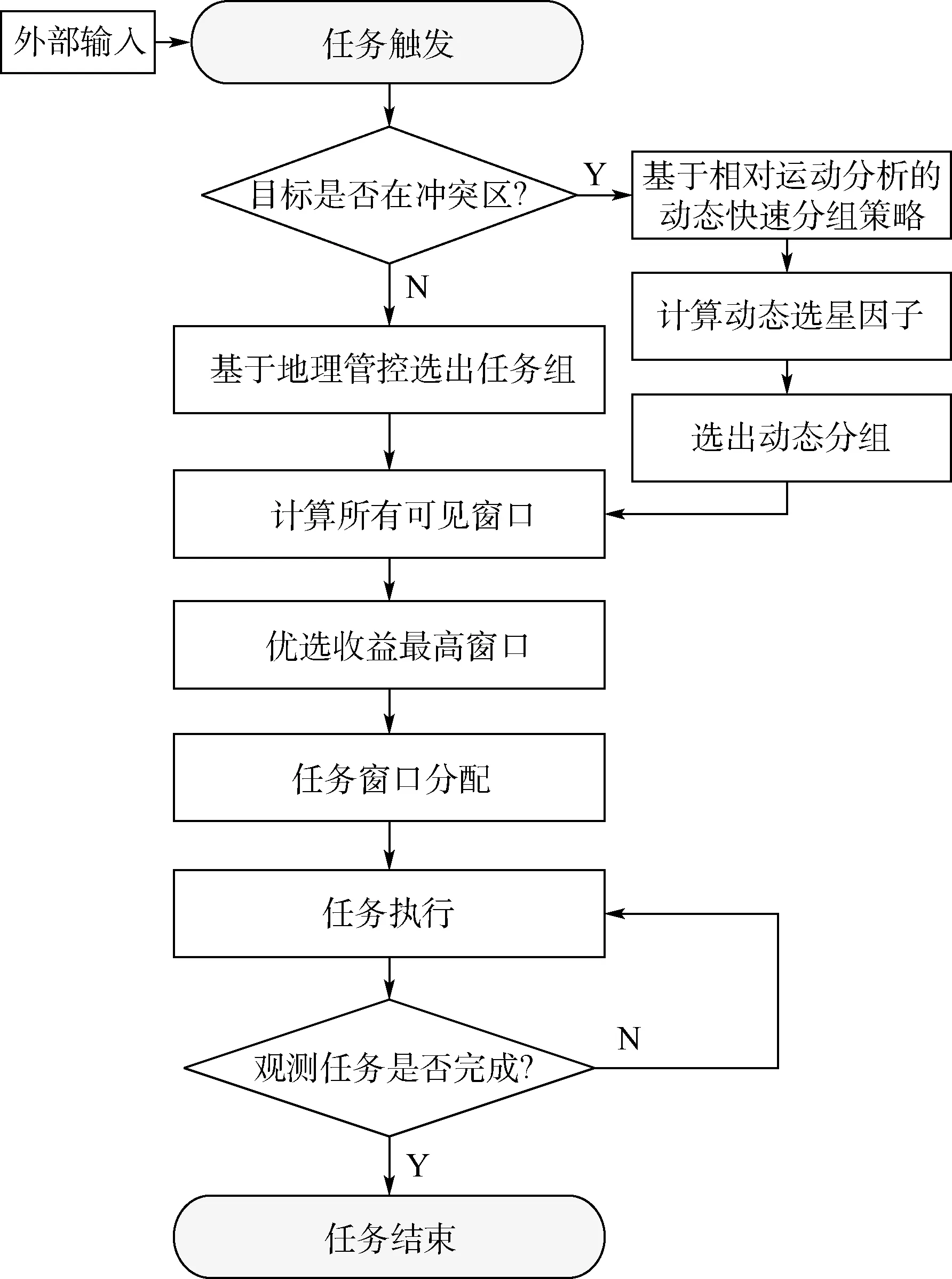
图7 任务调度流程Fig.7 Scheduling procedure
步骤1在外部目标信息输入条件下触发初始任务调度方案。
步骤2依据目标位置所在区域进行策略的选择,如在地理值守区域则根据区域的分组信息直接触发任务规划与调度的计算过程;如目标位置处于冲突区域,则触发基于相对运动分析的动态快速分组策略。 根据冲突区选择临近轨道面并通过选星因子选出动态观测分组。
步骤3确定分组之后,根据目标轨迹预测以及卫星信息计算所有可见窗口。
步骤4根据目标函数和约束条件进行任务窗口的优选。
步骤5通过星间链路进行任务分配。
步骤6任务执行。
步骤7判别观测任务是否结束,是则调度过程结束,否则执行步骤6。
3 仿真算例
3.1 仿真输入
选取3 个目标进行任务规划窗口的计算仿真,3 个目标的输入轨迹点坐标如表3 所示,表中包含目标初期2 个位置点的经度、纬度和高度,用于进行可见性与初始轨道的优选。

表3 目标初始位置Table 3 Targets initial position
各项权重的取值如表4 所示。
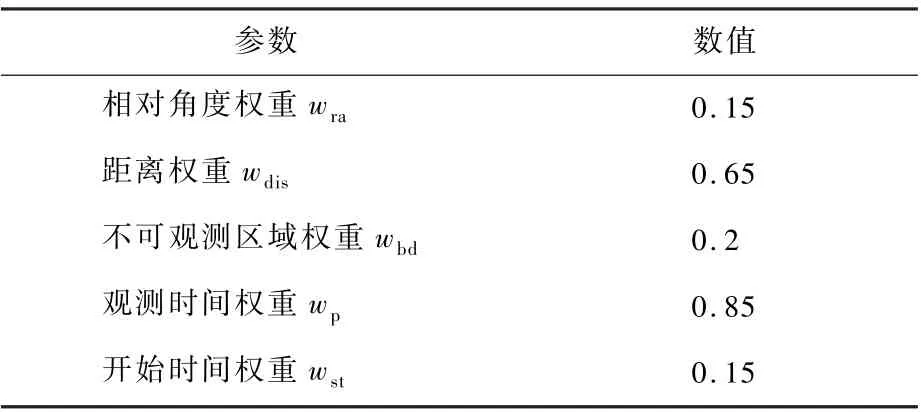
表4 权重设置Table 4 Weight configuration
3.2 仿真结果
3.2.1 卫星分组结果分析
首先对目标1 进行分组分析,目标1 出现的位置是( -19.203°, -38.226°),属于全球分区管控值守分组中的G8分组,该组的卫星包括(Sat15,Sat37,Sat38,Sat45,Sat46)。 采用相对运动分析的卫星优选方法与区域分组进行对比,采用相对运动分析进行优选的结果如图8所示。

图8 目标1 轨道面与卫星筛选结果Fig.8 Selection of orbit plans and satellites for Target 1
采用相对运动分析优选出来的卫星是(Sat15,Sat16,Sat37,Sat38),其中,Sat16 并非区域分组G8中的卫星,而是属于G8相邻的G5区域内的卫星。 在相对运动分析中,Sat16 被选入,因为Sat16 具备对目标1 的早期观测能力,可以在任务初期获得较好的观测条件,因此被选入。 在进行区域分组分析时,目标的可见性分析应该包含最近的一个相邻区域分组共同考虑可见性,从而实现较好的分组效果。
目标2 的初始位置为( -25.591°,21.137°),属于全球分区管控值守分组中的G4分组,该组的卫星包括(Sat14,Sat22,Sat31)。 采用相对运动分析的卫星优选方法与区域分组进行对比,采用相对运动分析进行优选的结果如图9 所示。

图9 目标2 轨道面与卫星筛选结果Fig.9 Selection of orbit plans and satellites for Target 2
采用相对运动分析优选出来的卫星是(Sat14,Sat15,Sat31,Sat38),其中,Sat15 与Sat38,是属于G4相邻的G8区域内的卫星。 Sat38 在观测开始约2 min 后进入G4区域。 再次证明了目标的可见性分析应该包含最近的一个相邻区域分组共同考虑可见性的需求。
目标3 的初始位置为( -123.993°, 11.633°),属于全球分区管控值守分组中的G3分组,该组的卫星包括(Sat11,Sat12,Sat42,Sat43)。 采用相对运动分析的卫星优选方法与区域分组进行对比,采用相对运动分析进行优选的结果如图10 所示。
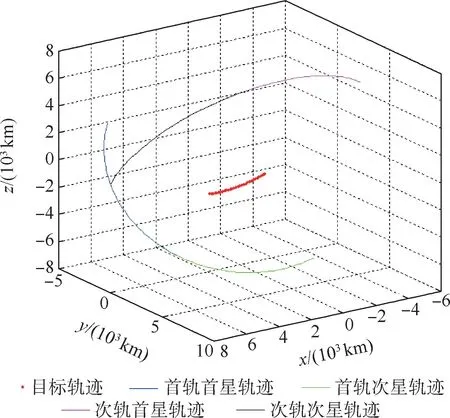
图10 目标3 轨道面与卫星筛选结果Fig.10 Selection of orbit plans and satellites for Target 3
采用相对运动分析优选出来的卫星是(Sat11,Sat12,Sat27,Sat28),其中,Sat27 和Sat28是属于G3相邻的G7区域内的卫星。 Sat27 和Sat28 在目标3 出现的早期具备较好的观测效能。再次证明了目标的可见性分析应该包含最近的一个相邻区域分组共同考虑可见性的需求。
通过对3 个分属不同区域的目标在其初始时刻进行区域分组和基于相对运动的动态分组分析。区域分组的结果和动态分组的结果相互印证了分组策略的有效性。 其中相对运动分组可以获得初始时刻观测条件较好的卫星分组。 对于区域分组,经过3 个目标的分析,证明在计算可见性时,不能只计算本组内的卫星与目标,应该将离目标最近的区域分组纳入可见性的计算,从而可以保证将适合观测的卫星纳入可见性分析。
3.2.2 观测窗口分配结果分析
通过对目标1、目标2、目标3 的轨迹进行外推,再与飞行弧段内的卫星进行可见性计算,将可见性窗口统一作图获得目标1、2、3 的可见性窗口如图11 所示。
图11 中可以看出,目标1 和目标2 都在场景的开始阶段就出现了,并且存在可见窗口上有多个时段是重合的。 而目标3 在630 s 左右出现,与目标1 有较多可见窗口重合,与目标2 有部分窗口重合。 因此,在任务窗口分配的前期主要考虑目标1 与目标2 之间的分配关系。 目标3 出现后,目标3 作为新增任务,主要考虑在任务变化情况下的观测窗口分配,分配结果如图12 所示。

图11 目标1、2、3 可见窗口Fig.11 Access windows for Target 1, 2, 3

图12 目标1、2、3 观测窗口Fig.12 Task windows for Target 1, 2, 3
观测窗口分配计算采用100 s 作为规划周期。 图12 中,白色方块表示对目标1 分配的观测窗口,编号方式为“TW 1-e”,表示对目标1 的第e个观测窗口。 绿色方块表示对目标2 分配的观测窗口,编号方式为“TW 2-e”,表示对目标2 的第e个观测窗口。 棕色方块表示对目标3 分配的观测窗口,编号方式为“TW 3-e”,表示对目标3 的第e个观测窗口。
每个规划周期内为每个目标优选出2 颗卫星共同组成立体观测组合,进行目标的立体定位观测。 图12 中目标1 的观测窗口前期主要选择并维持了观测条件较好的Sat37 作为主要的观测卫星,先后选择与Sat37 组成较好观测条件的Sat16、Sat38、Sat45、Sat44 等形成对目标的立体观测组合。 对于目标2,为目标2 选出了观测条件较好且观测持续时间较长的Sat14 和Sat15 作为立体观测组合进行目标立体定位。 在目标2 的观测窗口后段,选用Sat38 和Sat36 先后与Sat14 配合完成对目标2 的立体观测。 由于Sat14 与目标具有近1 000 s 的可见弧段,因此Sat14 被分配了最长的观测窗口。 对于目标3 观测窗口的分配结果为以观测窗口较长的Sat27 为主要观测卫星,先后安排Sat11 和Sat18 与其配合。
4 结 论
本文就红外星座突发任务的规划问题做出了深入分析和研究,提出一种多重应急调度策略,经过仿真计算,结果显示所提策略下进行的任务调度具有较好的任务响应时效性,可以满足大规模星座在轨实时规划的需求,为红外星座突发任务规划奠定了基础。
1) 本文提出基于区域值守的长期分组策略,面向地理区域进行长期分组,可以快速进行面向目标探测的组网和工作窗口的调度规划,为全球性星座的快速任务规划提供支撑。
2) 本文提出基于相对运动特性分析的动态快速分组策略,针对观测条件优选观测卫星,可以将具备最好观测条件的卫星快速分配给观测任务,获得较好的组网观测效果。
3) 本文提出的多重策略,充分考虑红外低轨星座空间和时间的特性结合星座长期运行和任务突发的运行特点,具有创新性,可以满足大规模星座在轨实时任务规划的需求。
猜你喜欢
环球时报(2022-05-23)2022-05-23
金桥(2021年4期)2021-05-21
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25
小学生学习指导(低年级)(2019年3期)2019-04-22
小学生学习指导(低年级)(2018年9期)2018-09-26
小学生导刊(低年级)(2017年1期)2017-06-12
健康女性(2017年3期)2017-04-27
儿童故事画报(2016年5期)2017-02-07
都市丽人(2016年12期)2016-12-14