
基于声发射时频分析与卷积神经网络的液膜密封摩擦状态识别*
2023-02-07 02:02翁泽文袁俊马刘怀顺孙鑫晖郝木明司佳鑫
润滑与密封 2023年1期
翁泽文 力 宁,2 袁俊马 刘怀顺 孙鑫晖 郝木明 司佳鑫
( 1.中国航发湖南动力机械研究所 湖南株洲 412002;2.直升机传动技术国防科技重点实验室 湖南株洲 412002;3.中国石油大学(华东)新能源学院 山东青岛 266580)
液膜密封作为非接触式机械密封的核心技术之一,在航空航天、石化等领域流体机械的动密封中应用前景广阔。随着流体机械的发展,高压、高温、高速、零泄漏等极端密封参数及复杂工况对设备的安全、性能、寿命等提出了更高要求。密封端面摩擦状态与设备的寿命及可靠性直接相关,因而密封状态的监测成为近期国内外研究的热点[1-3]。
为实现对液膜密封状态的即时识别,早期多采取对密封结构具有破坏性的植入式监测手段[4],虽在学术研究上有一定的使用价值,却难以满足工程应用领域的使用要求。为此,急需研究一种可行的无损监测技术。声发射作为一种新型的无损监测技术,在诸多工程监测中表现出色,在机械密封的监测中也取得了良好效果。文献[5-6]的研究表明,不同磨损阶段的声发射能量与摩擦因数和磨损率之间存在对应关系,因此通过对声发射信号的评估,可以确定出密封接触的发生和持续时间。由于声发射信号往往是非平稳非线性信号,时域分析或者频域分析只能用单一维度分析声发射信号,因此能够同时兼顾时域和频域信号特征的时频分析方法在发展中被不断发展丰富充实[7-9]。此外,从液膜密封状态的智能化监测角度分析,现有分析技术的多数研究仍以人为考察特定状态为主,辅以数值模拟验证,该方法可用于机制研究,却难以适用于工程应用,液膜密封状态监测缺乏机器决策特性。以卷积神经网络为代表的深度学习方法在该方面具有较高开发潜力[10-12]。
综上,针对液膜密封摩擦状态监测领域无损监测方法、数据处理方法及智能化预警开发不足的情况,在前人研究的基础上,本文作者提出一种基于声发射时频分析与卷积神经网络的液膜密封摩擦状态识别方法,实现液膜密封摩擦状态识别;同时,为探究不同时频分析方法对所构建的卷积神经网络模型性能的影响,确定针对液膜密封摩擦状态识别的最佳网络模型,选择短时傅立叶变换、小波变换以及S变换3种稳定且应用广泛的时频分析方法作为研究对象进行讨论。
1 声发射时频分析方法
1.1 短时傅立叶变换
短时傅立叶变换(STFT)是由傅立叶变换开发而来的一种瞬时频率估计方法,对输入信号加窗函数,通过窗函数在时间轴上的移动,对信号进行逐段分析得到信号的一组局部“频谱”,分析非平稳信号在不同时间段内的频率变化情况。其定义为

(1)
式中:x(τ)为原始时域信号;h(t-τ)为分析窗函数;τ为窗函数中心。
文中使用海明窗作为窗函数,其函数表达式如下:
(2)
1.2 小波变换
小波变换具有自适应窗口的时频分析功能,其基本理论是将输入信号由一系列小波基表示,这一系列小波基都是由一个母小波通过平移和伸缩得到,一定程度上解决了时间分辨率和频率分辨率不可兼得的问题。对于信号x(t),其小波变换的定义式为
(3)
式中:b为平移因子,作用与短时傅立叶变换的窗函数类似;a为伸缩因子,控制小波长度;ψ[(t-b)/a]为母小波ψ(t)通过平移和伸缩得到的一系列小波基的数学统一表达式,常用的母小波主要有Morlet小波和Haar小波,文中采用Morlet母小波进行分析。
1.3 S变换
S变换是一种加调谐高斯窗的特殊傅立叶变换,其开发的目的与小波变换相似,同样在一定程度上克服了时频分辨率不足的情况。使用S变换可以使窗函数在低频处提供较高的频率分辨率,而在高频处可获得较高的时间分辨率。对于信号x(t),其S变换的定义式为
(4)

2 卷积神经网络
文中卷积神经网络的算法输入为原始时域信号变换后的时频信号,经卷积、池化、激活函数等操作,将数据逐层抽象为自身任务所需的最终特征表示,最后以特征到任务目标的映射作为结束。卷积神经网络结构组建方式很多,但基本结构相似,一般由输入层、卷积层、池化层、全连接层和输出层构成,如图1所示。

图1 CNN网络结构
卷积层由数个特征面组成,每个特征面由多个神经元构成,神经元通过卷积核与其上一层特征面的局部区域连接共享权重,其一般数学模型如下:
(5)

池化层同样由数个特征面组成,每个特征面与其上层的特征面唯一对应,通过“降采样”降低特征面的分辨率来取得具有空间不变性的特征,可表示为
(6)
全连接层与BP神经网络类似,将最后一层卷积层输出的级联特征图进行全连接,表示为
h(x)=f(bo+wox)
(7)
式中:x为特征向量;wo为权重;bo为偏置;f(*)为激活函数。
激活函数通常使用饱和非线性函数,如tanh函数[13]、sigmoid函数[14]等。但在多层的神经网络采用梯度下降算法时,会出现梯度消失或者梯度爆炸问题。对比饱和线性函数,不饱和线性函数可以解决梯度消失或者梯度爆炸问题,并且可以加快收敛速度。文中采用ReLU函数[15],表达式为
ReLU(x)=max(0,x)
(8)

(9)
式中:θ=[θ1,θ2,…,θk]T为Softmax分类器参数向量;O为最终预测结果,所有预测结果之和为1。
3 液膜密封摩擦状态识别
液膜密封运行由于载荷、转速、黏度等工况条件的变化,会经历不同的摩擦状态,即干摩擦、边界摩擦、混合摩擦、流体摩擦,如图2所示,4种摩擦机制将导致端面间的声发射现象。液膜密封的理想状态是让密封端面一直处于流体摩擦,此时由于端面间流体润滑的作用,端面摩擦因数最小,液膜密封的使用寿命最长,而干摩擦则是液膜密封需要避免的一种摩擦状态。

图2 摩擦状态示意
基于声发射时频分析与卷积神经网络的液膜密封摩擦状态识别流程如图3所示,描述如下:
Step 1:通过实验采集4种摩擦状态下的声发射信号;
Step 2:对声发射摩擦信号以0.1 s为单位进行短时傅立叶变换、S变换、小波变换获取时频谱,如图4所示;
Step 3:对时频谱进行数据增强以增加样本多样性,定义图像像素为118×118;
Step 4:将短时傅立叶变换时频谱75%数据量作为卷积神经网络的训练集与验证集,剩余25%作为测试集;
Step 5:超参数寻优确定合适的卷积神经网络结构;
Step 6:对S变换、小波变换获取时频谱依次按照确定的网络结构重复Step 4,对比3种时频分析方法对识别性能的影响。

图3 摩擦状态识别流程

图4 部分图像样本的构建流程
4 实验及结果分析
4.1 实验装置
液膜密封实验装置如图5、图6所示,液膜密封结构如图7所示,其中补偿环为螺旋人字槽型,材质为9Cr18不锈钢,非补偿环材质为M298k碳石墨,液膜密封结构参数如表1所示。声发射信号通过Fujicera-AE144SA40声发射传感器(谐振频率为144 kHz)采集,声信号经40 dB前置放大器和信电分离器传至声发射采集卡。

图5 密封实验装置示意

图6 密封实验装置
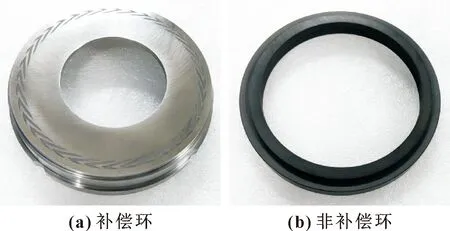
图7 密封环结构

表1 液膜密封结构参数
4.2 网络参数寻优
4.2.1 批量尺寸影响
批量尺寸(Batchsize)即卷积神经网络用于训练的每批数据量的大小,其取值会对模型的准确率及效率产生影响。实验结果如图8所示,图例中形如“Y-X”表示卷积核数量组合,其中,“Y”表示第一层卷积核数量值,“X”表示第二层卷积核数量。所定义的其他模型结构如表2所示。

表2 模型结构及网络参数
根据图8(b),在批量尺寸达到256之前,批量尺寸越大,其确定的梯度下降方向越准确,因此收敛效率越高;批量尺寸达到256之后,训练效率开始降低。参考图8(a),模型的识别准确率在批量尺寸达到16后趋于稳定,故将实验的批量尺寸值设置为256。

图8 批量尺寸对模型性能的影响
4.2.2 迭代次数影响
迭代次数对模型性能影响的实验结果如图9所示。图中仅示出了前30次训练结果,随着迭代次数的增加,模型的识别准确率相应提高,当迭代次数达到10之后,模型的识别准确率已经达到98.1%上,识别准确率已趋于稳定。为保证模型拟合完全,保守起见,文中将迭代次数确定为15。

图9 迭代次数对模型性能的影响
4.3 3种时频分析方法对识别性能的影响
3种时频分析方法下迭代次数与准确率关系的实验结果如图10所示。从整体趋势来看,短时傅立叶变换+CNN的收敛速度最快,到第7次训练时准确率已基本稳定,而小波变换+CNN与S变换+CNN准确率达到稳定的迭代次数分别为9和11;从训练结果来看,上述3种方法最终的识别准确率分别为99.51%、99.03%、99.09%,均取得了较为理想的效果。
为比较3种时频分析方法的稳定性,设计20次试验观察模型识别结果。经计算,3种时频方法下的平均识别耗时分别为13.79、14.02、13.71 s,相差较小。20次试验的准确率情况如图11所示,可以看出短时傅立叶变换+CNN的准确率无大幅波动,其准确率均值为98.71%,标准差为0.006;而小波变换和S变换样本的准确率均出现不同程度的波动,尤其是在第9及第18次实验,分别低至84.27%、91.75%。经计算,20次实验中小波变换+CNN和S变换+CNN的准确率均值分别为96.90%、98.32%,标准差分别为0.032、0.019。从上述分析可知,短时傅立叶变换+CNN的效果更具优势。

图10 3种时频分析方法下迭代次数与准确率的关系

图11 3种时频分析方法对模型稳定性的影响
4.4 识别性能分析
将构建的卷积神经网络模型与BP神经网络、超平面SVM、LeNet5网络(输入图像大小为32×32)对比,各取10次结果的平均值作为量化依据,结果如表3所示。
表3中,文中构建的卷积神经网络模型在4种方法中取得了最高的测试准确率。LeNet5网络的测试准确率也较高,但略低于文中方法,究其原因有二,一是文中的声发射信号时频谱样本不适用于LeNet5网络参数,二是时频谱图的压缩过程伴随着部分有效特征丢失,导致LeNet5网络的准确度下降。BP神经网络以及超平面SVM的测试准确率较差,原因有二,一是卷积神经网络相对于BP神经网络以及超平面SVM有算法优势,二是相对于文中方法,BP神经网络以及超平面SVM缺少了短时傅立叶变换的时频特征提取环节,有效时频信息未经有效利用,这也从侧面说明了在使用模式识别方法之前,对信号进行时频特征提取是有必要的。

表3 不同识别方法的结果对比
5 结论
(1)基于声发射时频分析与卷积神经网络可以满足液膜密封摩擦状态识别的需求.
(2)研究短时傅立叶变换、小波变换、S变换3种时频分析方法构建样本对卷积神经网络识别性能的影响,结果表明,短时傅立叶变换的识别效果最优,S变换次之,小波变换的识别效果最差。
(3)对比不同识别算法的识别效果,发现文中的卷积神经网络模型识别准确率明显高于BP神经网络、超平面SVM、LeNet5网络等。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
沈阳航空航天大学学报(2022年5期)2022-02-03
科学技术创新(2021年31期)2021-11-27
中山大学学报(自然科学版)(中英文)(2021年3期)2021-05-26
福建质量管理(2020年11期)2020-06-18
宇航计测技术(2018年3期)2018-09-08
智富时代(2018年7期)2018-09-03
智富时代(2018年7期)2018-09-03
人民论坛(2015年8期)2015-09-10
舰船科学技术(2015年8期)2015-02-27
