对学生拉曼光谱实验结果的模糊评价
2011-02-01 03:34张研研牛二纯任瑞晨王金龙
物理实验 2011年8期
张研研,牛二纯,任瑞晨,王金龙,陈 祺
(1.渤海大学物理系,辽宁锦州121013;2.辽宁工程技术大学资源与环境工程学院,辽宁阜新123000;3.太和区职业技能教育中心,辽宁锦州121000)
1 引 言
拉曼光谱是大学物理实验中的重要实验,学生通过实验操作得到拉曼光谱图,在此基础上分析样品的结构信息[1].实验结束后教师需要对学生的光谱图进行评分,这种测评带有一定的主观性和不公平性.本文以大学物理实验中利用LRS-III激光拉曼光谱仪测量四氯化碳的拉曼光谱为例,阐述了对拉曼光谱图像进行模糊综合评价的方法,取得了较为客观合理的测评结果.
2 实验原理和实验方法
拉曼散射是光和物质相互作用引起的,在光子和散射物质分子的碰撞过程中,散射物质会从入射光子吸收部分能量,或把自身的能量加给入射光子,再发射的光子便与原光子不相干,从而形成新的谱结构.当光子与分子发生弹性碰撞时,光子与分子之间没有能量交换,此时,散射光与入射光频率相同,这种频率未变的谱线叫做瑞利线.当光子与分子发生非弹性碰撞时,光子改变了能量和运动方向,使散射光频率ν与入射光频率ν0不同,ν<ν0的谱线称斯托克斯线;ν>ν0的谱线称为反斯托克斯线.3种谱线的频率各为ν0,ν0+Δν,ν0-Δν,而有用的信息就包含在Δν的数值及其强度、偏振等参量中.瑞利线的强度约为入射光强的10-3量级,较强的斯托克斯线的强度则不到入射光强度的10-6量级;反斯托克斯线起因于样品中较高能态的作用,按玻尔兹曼分布律,其数甚少,因此其相应强度也大减,不到斯托克斯线的1/10[2].
通常拉曼光谱仪由5部分构成[1](如图1所示):光源部分(提供单色性好、功率大的入射光)、外光路部分(聚光部件,是为了增强样品上入射光的辐照功率,通常用合适的透镜或透镜组对激光进行聚集,使样品正好处于汇聚激光束的腰部.集光部件,是为了最大限度收集散射光)、色散系统部分(使拉曼散射光按波长在空间分开)、接收系统部分、信息处理和显示部分.
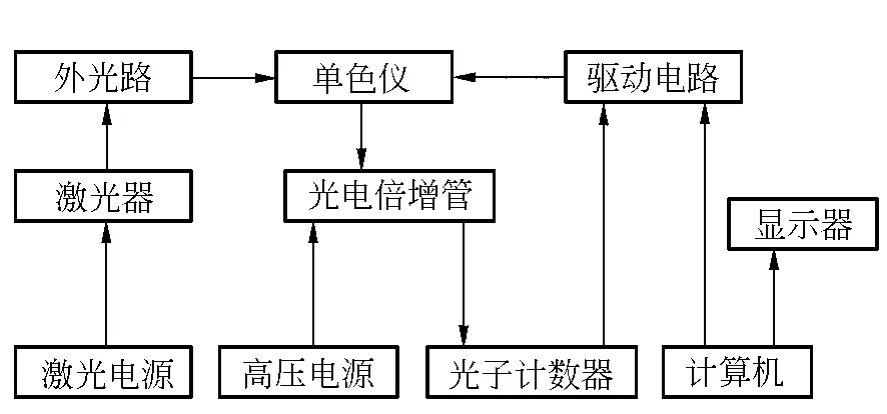
图1 拉曼光谱仪的基本结构示意图
本文采用天津港东生产的LRS-Ⅲ激光拉曼光谱仪,入射激光波长为532nm.采用光电倍增管或CCD作为拉曼光谱的单通道接收器件,单光子计数器进行信号处理,并应用计算机对谱仪运行自动控制、自动信号采集和加工处理.
学生操作的最主要部分是通过调节外光路,获得理想的拉曼光谱图像(如图2所示).外光路如图3所示,激光器射出的激光束被反射镜R反射后,照射到样品S上.为了得到较强的激发光,采用聚光镜C1使激光聚焦,使在样品容器的中央部位形成激光的束腰.为了增强效果,在容器的另一侧放凹面反射镜M2.凹面镜M2可使样品在该侧的散射光返回,最后由聚光镜C2把散射光汇聚到单色仪的入射狭缝上.

图2 CCl4样品的激光拉曼光谱图
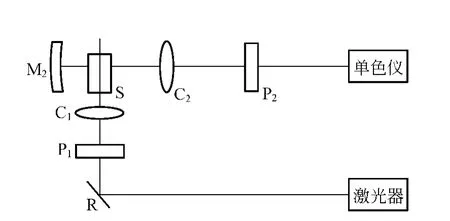
图3 外光路示意图
3 模糊数学模型在实验图像评价中的应用
大量实验表明,激光拉曼光谱实验的最佳工作参量为入射、出射狭缝宽0.15mm,阈值21V,积分时间350~600ms,负高压8V[3],此时激光拉曼光谱的图像分辨率高且较平滑.但学生在实验操作过程中几乎不能完全正确地找到最为理想的实验参量,造成实验图像中存在着各种各样的问题,这就对实验图像的评价带来困难.以下通过模糊数学原理较为客观地评价拉曼光谱实验图像的优劣.
3.1 模糊综合评价原理
设因素集为A={A1,A2,…,An};评判集为V={v1,v2,…,vm}.对单个因素Ai(i=1,2,…,n)评判,得到V上的模糊集{r11,r12,…,r1m},组成评判矩阵
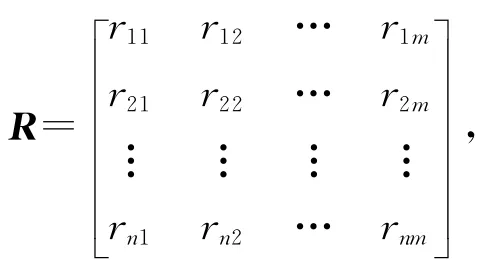
rij∈[0,1],j=1,2,…,m.又设各因素权重为α={α1,α2,…,αn},则综合评判结果为

根据有关定理,可采用实数加乘运算代替与或运算,其结果仍是F集,且运算更为精细[4],即
3.2 模糊综合评价在实验图像评价中的应用
学生获得的实验图像中容易出现下列问题:图像中瑞利峰的位置与入射光波长532nm不同,证明图像没有进行波长修正,导致所有峰的位置都会偏离准确值;实验曲线不够平滑,出现了一些强度较小的峰,说明阈值等参量调节不当;图像分辨率主要通过观察波长在555nm附近的相距很近的2个峰是否被分辨出来,若没有分辨出来则说明仪器的入射和出射狭缝宽度没有调节好,影响了图像的分辨率;若峰的整体相对强度不强,则说明外光路或一些实验参量没有调节到最佳状态.综合以上因素,确定因素集为A={瑞利峰的位置,曲线的平滑度,图像分辨率,峰的整体强度},由专家确定因素权重为α={0.2,0.3,0.3,0.2},评判集V={优,良,中,差}.
现以图4某学生获得的实验图像为例,进行综合评价.首先根据图像质量得到评判矩阵
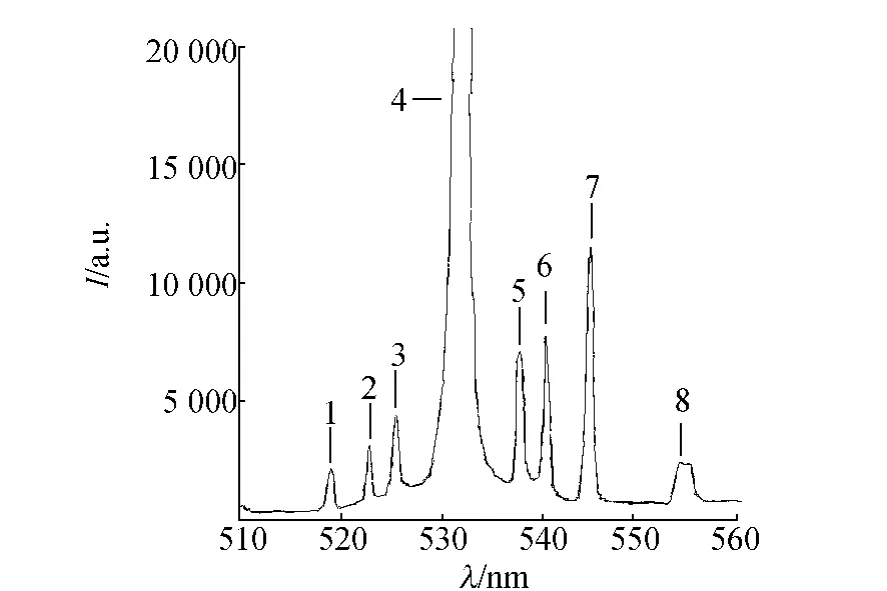
图4 学生获得的激光拉曼光谱图
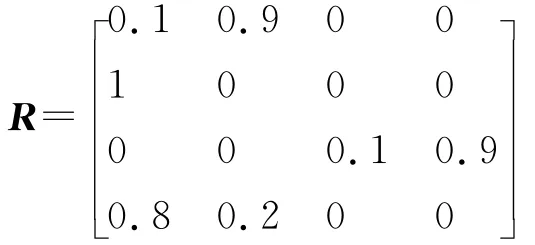
根据(1)式得B={0.48,0.22,0.03,0.27},实验结果满分为1,给评判集附上分值V={1,0.8,0.6,0.4},则该图像最终评价分值为C=B·VT=0.782.
3.3 多因素模糊模式识别的原理
设影响模式识别的因素集A={A1,A2,…,An},记Xk为因素Ak的状态集(论域).

其中i=1,2,…,m,m为模式的个数.通常取

其中αk∈[0,1],且表示因素Ak在模式确定中的重要程度,(xk)是Xk上的模糊子集.
给定待识别样品x′=(x1′,x2′,…,xn′),由(2)式和(3)式得到(x1′,x2′,…,xn′)∈[0,1],它表示x′符合模式的可能性程度.对于m个模式,利用最大隶属原则进行归类[5].
3.4 多因素模糊模式识别在实验图像评价中的应用
设影响模式识别的因素集仍为A={瑞利峰的位置,曲线的平滑度,图像分辨率,峰的整体强度},模式类别有优秀,良好,中等,差.第一个因素瑞利峰的位置对各模式的隶属度分别用表示(单位nm),其函数关系如下(函数图像如图5所示):
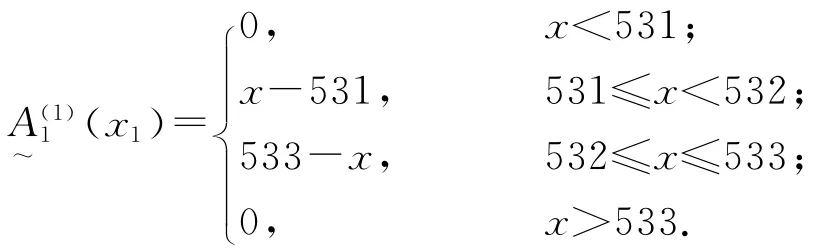
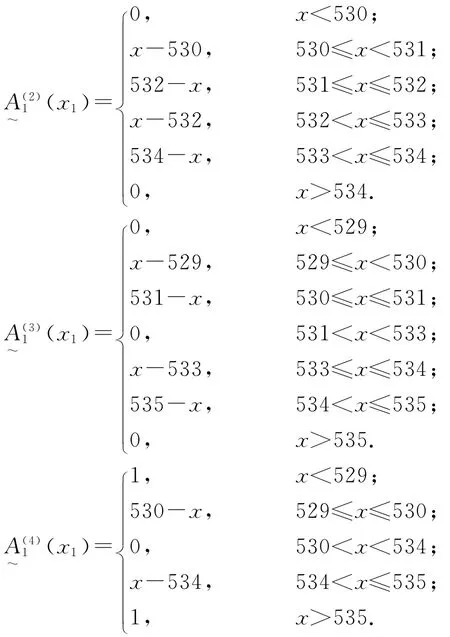
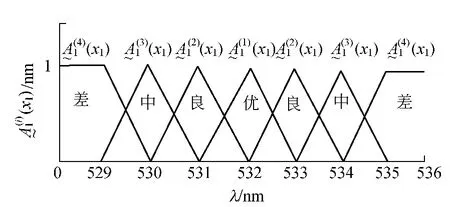
图5 因素瑞利峰位置对不同模式的隶属函数图像
因素曲线的平滑度对各模式的隶属函数中的x取图像中峰的总个数k(当自动寻峰中的最小峰高取50时检索出的峰的总个数,若图像不平滑,则检索出的峰较多);因素图像分辨率对各模式的隶属函数中的x取能把第8和第9个峰检索出来时自动寻峰对话框中最小峰高的值I(最小峰高越高,证明第8和第9个峰值越高,图像分辨率越好);因素峰的整体强度对各模式的隶属函数中的x取第7个峰的峰值I7(这里以第7个峰说明,当然选择其他峰作为参照也可以).这3个因素对各模式的隶属函数这里不再赘述,由图6~8可看出其隶属关系.
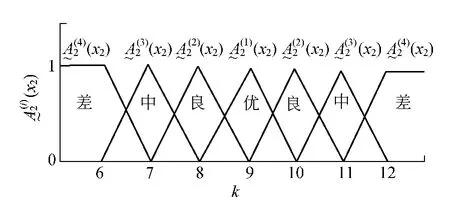
图6 拉曼峰个数x对不同模式的隶属函数图像

图7 最小峰高值I对不同模式的隶属函数图像
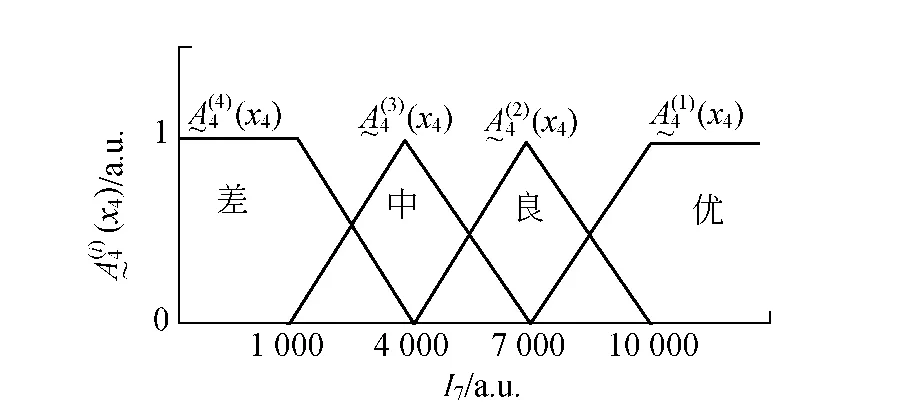
图8 第7个峰峰值I7对不同模式的隶属函数图像
现仍以图4的实验图像为例,进行模糊模式识别.图4在寻峰过程中采用的是计算机自动寻峰,自动寻峰对话框中的最小峰高设为50,峰的位置和强度值会自动显示在对话框中.由此可得到因素集中的各因素的值为:瑞利峰波长531.8nm,最小峰高值为50时检索出的峰的个数仍为9个,最小峰高值为50时仍不能分辨出第8和第9个峰,第7个峰的峰高值为11 423.把各值代入隶属函数中结果为,其他隶属函数值为0.设因素权重仍为α={0.2,0.3,0.3,0.2}.由(2)式和(3)式得各模式的可能性程度=0.66,=0.04,=0,=0.3.值最大,故该图像成绩为优秀.若给各模式附上分值{1,0.8,0.6,0.4},则实验图像最终成绩为0.812分,与前面综合评价所得结果相似,都约为0.8分.
4 结束语
综上所述,本文仅以拉曼光谱图像的评价为例,应用模糊数学对实验结果进行评价,得到了更为合理和客观的评价结果.如果能把上述模糊数学评价模型编成计算机程序,则评价起来更方便.
[1] 张天喆,董有尔.近代物理实验[M].北京:科学出版社,2004:56-60.
[2] 师振宇,黄山,方堃,等.拉曼光谱实验方法及谱分析方法的研究[J].物理与工程,2007,7(2):60-64.
[3] 申晓波,郝世明,胡亚菲.激光拉曼光谱实验最优实验参数的确定[J].物理实验,2009,29(10):31-33.
[4] 韩晓晨,邰晓红.企业绩效的模糊评价[J].科学技术与工程,2005,5(17):1277-1281.
[5] 郭嗣琮,秦书玉.采矿工程中的模糊数学方法Ⅱ[J].阜新矿业学院学报,1992,11(1):126-134.
猜你喜欢
量子电子学报(2021年6期)2021-12-14
东坡赤壁诗词(2020年4期)2020-09-02
书香两岸(2020年3期)2020-06-29
书香两岸(2020年3期)2020-06-29
东坡赤壁诗词(2019年3期)2019-07-05
中国粮油学报(2018年12期)2018-03-19
中小学实验与装备(2014年3期)2014-09-17
原子能科学技术(2014年3期)2014-02-28
郑州大学学报(理学版)(2013年3期)2013-03-11
物理与工程(2013年1期)2013-03-11