
基于STM32的双轮平衡车
2011-05-21 00:42张志强
电子设计工程 2011年13期
张志强
(武汉理工大学 湖北 武汉 430070)
双轮平衡车突破了传统意义上的车的概念,它的特点是:两个轮子处于共轴的两个平行平面上,差动式运动,零半径转向,依照倒立摆的原理达到动态平衡。最早由美国发明家狄恩·卡门 (Dean Kamen)与他的DEKA研发公司(DEKA Research and Development Corp.)发明设计,名为 Segway。 但是其售价也是令人咋舌:7万人民币。如何能使其功能更加丰富而又成本低廉,是本文着重解决的问题。
在微处理器的选择上,基于ARM内核的32位微控器STM32,CPU最高可工作在72 MHz,占据了高性价比和低功耗的优势,尤其是丰富的外设,快速的中断,强劲的运算速度完全满足设计平衡车的需求。
1 平衡车的力学模型
为了获得平衡车的平衡方程[1-2],需要分析其力学结构,平衡车的主要构成是车身和左右两个车轮,影响平衡的参数有:重心、质量、转动惯量、半径等。为保持动态平衡,车身重心应置于车轴的垂直上方的一定范围内,可建立力学模型,如图1所示。
假设平衡机器人为刚体,左右两轮完全对称,并且忽略车轮与地面之间的滑动与侧向滑动,以左轮和车身为研究对象得到如下方程:
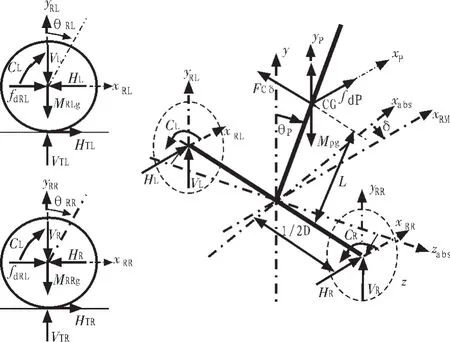
图1 力学模型Fig.1 Mechanical model
左轮方程为:

其中,xRM:水平位移 (m);MRL:左车轮质量 (kg);HL:车身施加于车轮的水平作用力 (N);HTL:地面对车轮的水平作用力(N);θRL:左轮相对于垂直分量的倾角(rad);JRL:左轮相对于 Z轴转动惯量(kgm2);CL:左轮电机产生的扭矩(kg·m);R:车轮半径(m)。
车身的方程为:

其中,xp:车身水平位移分量 (m);yp:车身垂直位移分量(m); Mp:车身质量(kg);VL,VR:左右两轮施加于车身的垂直作用力(N);HL,HR:左右两轮施加于车身的水平作用力(N);L:质心距离车轴的距离(m);θp:车身对于 y 轴倾斜角(rad);Jpθ:车身对于 z 轴的转动惯量(kg·m2);CL,CR:连接左右两轮的电机产生的扭矩 (kg·m).
当平衡车达到平衡状态时,sinθP≈θp,cosθp≈1; 根据式(1)(2)(3)(4)(5),得到微分方程:

2 控制系统设计

图2 系统组成示意图Fig.2 Schematic diagram of system components
当平衡车进入平衡状态时,安装于车身的陀螺仪和加速计实时采集数据,并传送至主控制器。主控制器将数据进行Kalman滤波[3]和平衡算法处理,得出姿态调整所需要的车轮加速度值,换算为电机的控制量,通过串口3发送到舵机驱动器,控制两路由舵机改装的伺服电机作姿态调整。安装于车轮的编码器得到实际速度和运行距离,反馈回主控制器,经由PID算法进行误差调整后再次将控制量发送到舵机控制器,形成一个闭环反馈。整个系统不断进行调整便可以维持平衡车的平衡。
平衡车行走和转弯是由遥控器的方向消息给出,当遥控接收器收到消息后,引起主控制器中断,通过平衡算法处理以后给出合适的控制量,控制左右两个轮子行走和转弯,同时LCD要显示方向键的按下状态。
当检测到平衡车失去平衡的时候,主控制器进入特别处理模式,将启动舵机M1或M2,在机械臂的作用下重新归位到平衡状态,在动作完成后,机械臂回到初始位置。
3 硬件设计
本文主控制器采用意法半导体生产的STM32F103ZE[4]作为主控制器,它使用来自于ARM公司具有突破性的Cortex-M3内核,该内核集高性能、低功耗、实时应用、竞争性价格于一体。STM32F103ZE的主要性能参数有:主频最高72 MHz,90 DMips,1.25 DMips/MHz。 512 k 字节闪存程序存储器,64 k 字节 SRAM。 外设有: 定时器、ADC、SPI、I2C、USART和USB等。
三轴加速计选用飞思卡尔的MMA7260QT[5],MMA7260QT的量程有 1.5 g、2 g、4 g、6 g 4个, 本文选择 1.5 g的量程范围,精度为800 mV/g,内部集成了低通滤波器。将MMA7260QT的x轴y轴接入STM32的AD采样,其中一个轴作冗余设计,以增强可靠性,12位的AD采样精度可达0.8 mV,转换时间为 1 μs。
陀螺仪采用亚德诺半导体的ADXRS300[6],其量程为±300°/s,线性误差小于 0.1%,使用 FPGA采样积分后,以串口方式输出角度信息。经信号处理后的误差小于0.5°,温度漂移小于 0.6°。
舵机控制器是用于控制平衡车左右车轮伺服电机,它可以同时控制16路舵机,通过串口接收命令,并输出PWM波形。舵机选择了比亚迪公司生产的MG995,其速度为0.17 s/60°(4.8 V),扭矩为 13 kg·cm,死区设定 4 μs。 用于车轮的舵机需要去除销钉,并用两个2.5kΩ电阻取代滑动变阻器。
遥控器部分是采用PT2262与PT2272,分别用于调制解调,PT2272解调后的信号引脚分别与STM32的Remote1~Remote4(PC8~PC11)连接,前后左右4个按钮对应其中Remote1~Remote4,当遥控器有按键按下时STM32产生中断并作相应的处理。
编码器由两部分组成,即:码盘和信号采样电路。码盘与车轮共轴,车轮转动带动码盘转动,采用两个直射式红外光电传感器作采样电路的设计。本文选用南旭科技的光电传感器 ST150,ST150的响应时间为 5 μs、光缝宽度 0.4 mm、遮光电流1 μA、通光电流0.25 mA,满足设计要求。同时使用两个ST150是为了得到相位差调整为90°两路波形,这样就可以检测出车轮的旋转方向。经过施密特触发器74HC14整形后输入到STM32的Encode1~Encode4(PC4~PC7)。编码器电路如图3所示。

图3 编码器Fig.3 Encoder
LCD选用奕力科技的ILI9320,使用SPI总线与STM32主控制器连接。将以上几个部分构建为一个系统,主控制器STM32的电路图如图4所示。
USART2和USTAR3分别与陀螺仪和舵机控制器通讯,USART2与USART3经MAX3232芯片将TTL电平转换为RS232电平,RS232的工作范围是-15~+15 V,即使存在电压衰减传输信号也可以被有效识别。
4 软件设计
本文采用实时操作系统uCOS-II[7]作为STM32的片上操作系统,根据不同的功能分为3个不同的任务。角度和角加速度等重要数据通过中断实现,保证能够快速得到处理。软件的基本结构如图5所示。
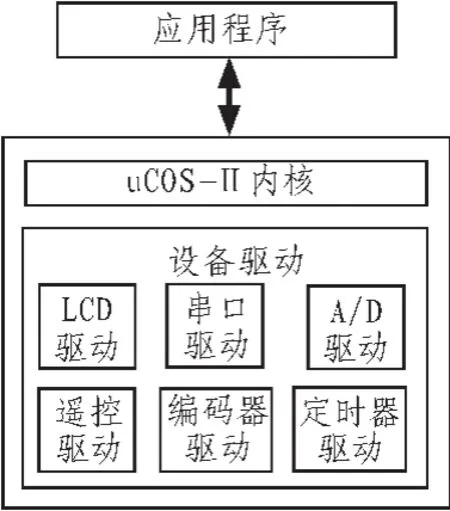
图5 软件总体框图Fig.5 Block diagram of software

图4 主控制器设计Fig.4 Design of master controller
在STM32复位以后,首先执行初始化操作。依次为PLL、SPI、串口、A/D 采样、I/O、DMA、定时器、操作系统,在完成以上操作以后,启动操作系统并创建任务,开始运行应用程序。
uCOS-II任务设计为3个,根据优先级由高到低得顺序依次是:
1)任务一 处理陀螺仪传输来的数据,并和加速计采样的数据通过Kalman算法滤波,滤波完成后发送信息量通知任务二处理。如果检测到状态为失去平衡,则通知任务二进行恢复平衡状态的操作。
2)任务二 在平衡状态下,如果收到信号量(Balace_sem),PID算法将编码器得到的加速度值与平衡算法计算的加速度值进行调整,并将调整后的控制量输出到舵机控制器。如果收到信号量(Unbalace_sem),则启动机械臂使得平衡车恢复平衡状态。
3)任务三 等待遥控器的信号量,如果有信号量便通知任务一进行方向调整,同时通过SPI发送到LCD显示。
传感器的数据都以中断的方式处理,根据优先级由高到低得顺序依次是:
1)用于接收陀螺仪数据的串口2;
2)连接舵机控制器的串口3;
3)左右两个编码器的I/O;
4)遥控器4个方向按钮的I/O。
加速计的AD采样使用查询的方式。在得到陀螺仪的数据后,立即进行AD采样,使得加速计和陀螺仪得到的数据尽量保持在较短的时间内。系统软件流程如图6所示。
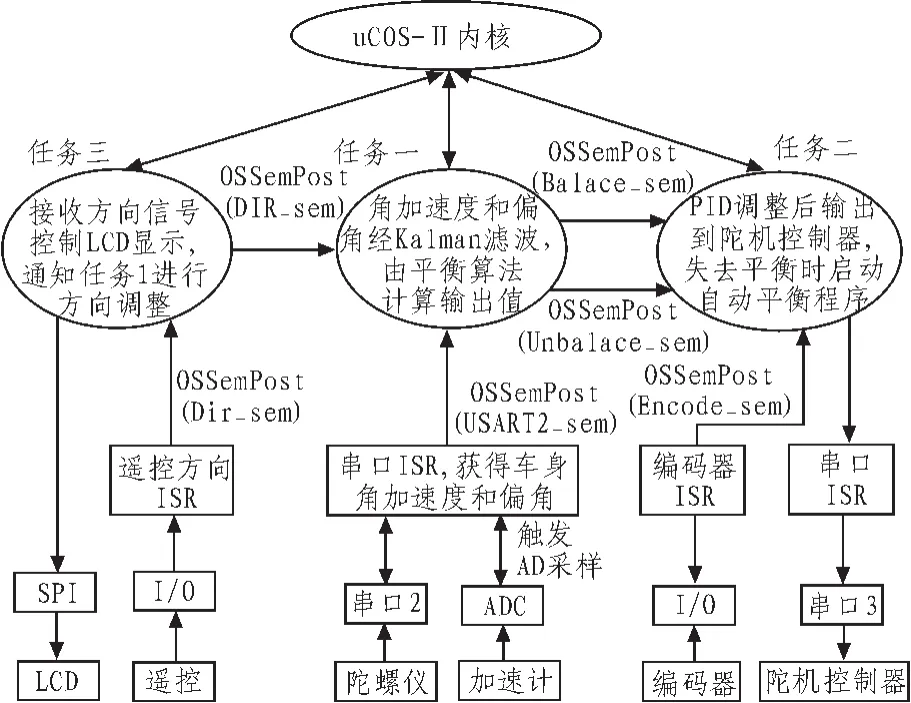
图6 系统软件流程图Fig.6 Flow chart of system software
5 实验结论
使用ARM开发工具RealView MDK[8]对平衡车进行调试,该开发工具自带的Logic Analyzer窗口可实时跟踪变量的变化。因此,在平衡车进入平衡状态时,用Logic Analyzer窗口观测到车身的倾角变化,软件中变量Gyro_degree代表陀螺仪得到的车身倾角θp,Logic Analyzer窗口得到的数据如图7所示。
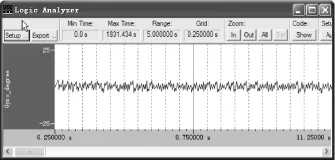
图7 Logic Analyzer数据Fig.7 Data of Logic Analyzer
根据Gyro_degree的数据,θp的数据大部分在范围-5°≤θp≤5°内振荡,说明系统运行平稳可靠。
在室内无坡度的地面上,使用遥控器做S型曲线运动,倾角的范围为:-5°≤θp≤5°,并且LCD可正确显示出方向信息。当 θp>25°,或者 θp<-25°时,平衡车失去平衡。此时舵机 M1与 M2启动,将平衡车调整至-5°≤θp≤5°的范围内,重启动平衡控制。
此样车按照目前市场价格,总价约1 500人民币,相对于Segway成本大大降低。
6 结束语
本文以STM32为处理器,从硬件搭建了一个自平衡系统,以实时系统uCOS-II为片上系统,进行软件设计,并对平衡系统进行功能扩展。实验证明,本系统功能丰富,成本低廉,其中自动恢复平衡的功能,可用于机器人排爆,野外探测等领域。
[1]Crasser F, D’Arrigo A,Colombi S, et al.JOE:A mobile,inverted pendulum [J].IEEE Transactions on Industrial Elec-tronics,2002, 49(1):107-114.
[2]陈伟,延文杰,周超英,等.两轮自平衡机器人控制系统设计[J].传感器与微控制器,2008,27(4):117-120.CHEN Wei,YAN Wen-jie,ZHOU Chao-ying.Control system design of two wheels self-balance robot[J].Transducer and Microsystem Technologies,2008,27(4):117-120.
[3]袁泽睿.两轮自平衡机器人控制算法的研究[D].哈尔滨:哈尔滨工业大学,2006:22-31.
[4]STMicroelectronics Integrated Products.STM32 Reference manual[EB/OL].(2011-01-01)[2011-04-01].http://www.stmicroelectronics.com.cn/internet/com/TECHNICAL_RESOURC ES/TECHNICAL_LITERATURE/REFERENCE_MANUAL/CD00171190.pdf.
[5]Freescale Integrated Products.MMA7260QT[EB/OL].(2008-05-03)[2011-04-01].http://cache.freescale.com/files/sensors/doc/data_sheet/MMA7260QT.pdf?fsrch=1&sr=1.
[6]Analog Devices Integrated Products.ADXRS300[EB/OL].(2004-01-01)[2011-04-01].http://www.datasheetarchive.com/pdf/getfile.php?dir=Datasheets-4&file=DSA-67061.pdf&scan=.
[7]Labrosse J J.嵌入式实时操作系统μCOS-Ⅱ[M].邵贝贝,等译.北京:北京航天航空大学出版社,2003.
[8]李宁.ARM开发工具RealView MDK使用入门[M].北京:北京航空航天大学出版社,2008.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
小猕猴学习画刊(2021年8期)2021-08-27
作文大王·低年级(2020年9期)2020-10-12
作文大王·低年级(2020年9期)2020-10-12
自动化学报(2019年6期)2019-07-23
知识就是力量(2019年12期)2019-01-14
电子制作(2018年1期)2018-04-04
百科探秘·航空航天(2017年9期)2017-12-31
制造业自动化(2017年2期)2017-03-20
山东工业技术(2016年15期)2016-12-01
