阵列式磁悬浮用电磁铁的定点悬浮模糊控制技术
2011-08-07 08:13明正峰王璐璐张竟飞
电工技术学报 2011年12期
明正峰 王 浩 王璐璐 汶 涛 张竟飞
(西安电子科技大学机电工程学院 西安 710071)
1 引言
在常用的磁悬浮系统中,电磁悬浮是通以直流电的常导线圈所产生的磁场,对铁磁材料产生吸力(或斥力)来实现悬浮的。目前,世界上有三种类型的磁悬浮:一是以德国为代表的常导电式磁悬浮,二是以日本为代表的超导电动磁悬浮,三是我国的永磁悬浮。
常导电磁悬浮技术一般最大可达到厘米级的悬浮高度,但由于能量损耗大和悬浮气隙小等缺陷限制了该技术的进一步发展。超导电磁悬浮采用低温超导磁体,悬浮气隙较大,可达到分米级的悬浮高度,但由于采用闭环控制、磁场波动较大及成本过高等原因,其工程应用价值有待进一步论证。在此背景下,以节省能量、增大悬浮气隙、增大悬浮物移动范围等方面有较大优势的分布式电磁–永磁混合悬浮系统引起越来越多研究者的关注。
电磁-永磁混合悬浮是近年来兴起的一种新的电磁悬浮技术,是在常导电磁悬浮的基础上,通过采用永磁铁等新材料和与其对应的新结构,改进而成的电磁悬浮技术。电磁-永磁混合悬浮主要是将提供电磁力的常规电磁铁嵌入永磁铁等材料,利用其本身的储能,克服一部分做功,从而减小系统的总耗能和功率损耗,并使得系统易于小型化,利于和其它系统的集成[1-18]。
针对磁悬浮系统,有许多学者提出了相应的控制策略。比如,针对磁悬浮列车系统,有学者设计了一套适合中低速磁悬浮列车自身特点的牵引控制系统[1];针对磁悬浮球系统,有学者采用Fuzzy-PID复合控制模型对磁悬浮球系统进行控制,得到了理想的控制效果[2];针对混合悬浮系统,有学者提出了混合悬浮系统的神经元 PID(proprotion integration differentiation)控制策略,并用实验证明该控制策略能实现平稳起浮[3]。同时,由于磁悬浮系统自身具有耦合性等特点,而解耦理论、协调控制可以改善自动系统的调节品质,提高系统的可靠性及控制质量[4-6]。因此,可以考虑在磁悬浮系统的控制策略中加入解耦理论和协调控制的思想。
为了对所提出的控制策略进行验证,有许多文献对磁悬浮系统自身及其控制系统做了仿真分析。有学者建立了永久磁铁和常导线圈构成的混合式悬浮系统的数学模型,并分析它的一些性质,通过仿真说明混合悬浮系统具有小电磁电流和低悬浮能耗的优越特性[7-8];有学者针对混合悬浮系统建立了系统的数学模型,分析其性质,并采用滑模控制达到了良好的控制效果[9-10];有学者建立了磁悬浮列车制动系统模型,通过Matlab仿真结果表明选用“外环采用速度反馈,内环采用减速度反馈”的控制器能够达到理想的制动效果[11];还有一些学者采用模糊控制的思想,仿真比较出模糊控制相比于传统控制的优点,提出适用于磁悬浮系统的模糊自适应PID控制方法(IFPID)[12-13]。
针对磁悬浮系统实际控制时的复杂环境,有学者建立了磁悬浮列车运行控制系统的仿真环境,并介绍了利用工控机对磁悬浮列车机械制动系统进行控制时,控制系统的硬件配置和软件流程[14-15]。
混合磁悬浮系统由电磁和永磁两部分组成,电磁铁的设计和控制是混合磁悬浮系统重要内容,但是,永磁体的设计对于整个系统能否稳定运行也至关重要。有学者对于永磁体的电磁感应强度与导体材料之间的关系做了一些研究[16]。Halbach阵列是1979年由美国著名学者Klaus Halbach针对永磁体的结构提出的一种新颖的设计方法,有学者介绍了Halbach永磁阵列的基本形式及其在磁悬浮列车中的应用现状[17-18]。
这些文献针对磁悬浮系统的研究都是针对分米级、厘米级气隙间距的研究,都没有涉及到米级气隙间距下磁悬浮系统的设计和控制方法。而米级悬浮技术的研究可以推动磁悬浮技术在大气隙下的应用,并且,通过米级悬浮技术的研究还可以反过来进一步推动分米级、厘米级悬浮技术的研究。在米级悬浮下,要使悬浮物体达到米级悬浮高度,需要足够大的电磁力,通过多种设计方法的比较,在Halbach永磁阵列在基础上,提出了阵列式电磁铁的控制方法,并利用解耦理论和协调控制的思想,采用模糊控制的方法[19],建立模糊规则,用专家经验的方式对本文所提到的米级磁悬浮系统进行定点悬浮控制。
2 电磁-永磁混合悬浮系统的原理
2.1 单电磁-永磁混合悬浮系统的原理
在单电磁-永磁混合悬浮系统中,永磁铁位于铁心上方,它们与铁心和线圈所构成的电磁铁构成混合悬浮磁铁,通过改变电磁铁的电流大小,可以调节悬浮物体与电磁铁之间的磁力,从而控制悬浮物体进行运动。单电磁–永磁混合悬浮系统的基本结构如图1所示。

图1 单电磁-永磁混合悬浮系统的结构Fig.1 The structure of uni-permanent magnet hybrid suspension system
2.2 阵列式电磁-永磁混合悬浮系统的原理
阵列式电磁-永磁混合悬浮系统的永磁铁与单电磁-永磁混合悬浮系统的永磁体布局一致,区别在于,位于底部的电磁铁采用的是电磁铁阵,通过改变电磁铁阵中各个电磁铁的电流大小,可以控制悬浮物体在三维方向上的受力大小,从而控制悬浮物体进行运动,阵列式电磁–永磁混合悬浮系统的基本结构如图2所示。
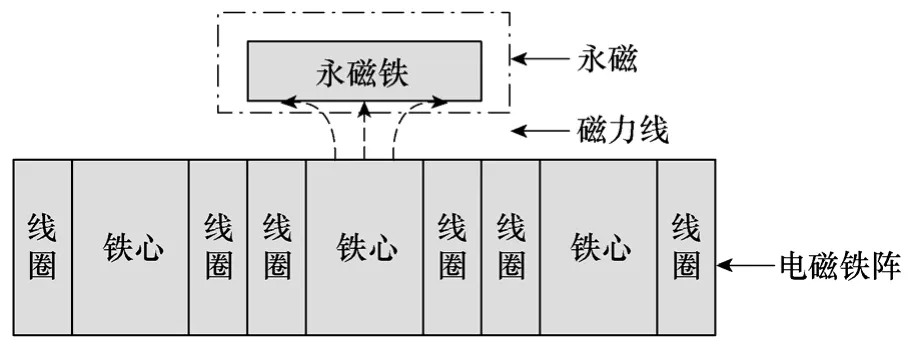
图2 阵列式电磁-永磁混合悬浮系统的结构Fig.2 The structure of electromagnetic array-permanent magnet hybrid suspension system
单电磁-永磁混合悬浮系统可以比较容易的实现悬浮物体的高度控制,而比较难于实现悬浮物体的三维运动控制。为了解决这一问题,给出了两种控制思想:
(1)通过增加电磁铁数量的方法,将底面电磁铁变成阵列式电磁铁,并在侧面增加两个电磁铁,用于控制悬浮物体的水平方向的运动,由此,提出了“阵列式电磁-永磁混合悬浮系统的四单元式”三维运动模糊PID控制方法。
(2)通过增加电磁铁数量的方法,将底面电磁铁变成阵列式电磁铁,不需要侧面电磁铁,仅靠底面阵列式电磁铁来实现悬浮物体的三位运动,由于这种控制方法在米级悬浮下的实现比较困难,本文只给出了定点悬浮的思想,即“阵列式电磁-永磁混合悬浮系统的九单元式”定点悬浮模糊控制方法。
2.3 实验中悬浮物体的模型
实验中,悬浮物体为正方体形状,永磁铁固定在悬浮物体的底面,由于悬浮物体采用浮力的方式克服了一部分重力,因此,大大减小了电磁铁的通电电流。悬浮物体的浮力和重力差值为8N。具体的悬浮物体结构图如图3所示。

图3 悬浮物体结构图Fig.3 The structure of suspension object
2.4 实验中整个系统的工作原理
实验中,电磁-永磁混合悬浮系统控制原理图如图4所示。

图4 电磁-永磁混合悬浮系统的控制原理图Fig.4 The control schematic of electromagnetic-permanent magnet hybrid suspension system
其中,位置检测用来检测悬浮物体的位置信息;计算机接收到位置信号后,计算出九个电磁铁所需电流;然后,将电流对应的信号输出给电源;电源根据接收到的信号输出电磁铁所需要的电流。
3 模糊PID控制原理
在实验中,由于该磁悬浮为米级悬浮,磁悬浮系统的测量、磁场建立和电流的反应等都需要较长的时间,采用通常的控制很难达到精确控制,因此,这里采用模糊PID的控制方法。
3.1 模糊控制器的设计步骤
模糊控制器主要由四步组成,具体步骤如下:
(1)精确量的模糊化。
(2)制定模糊控制器的控制规则。
(3)确定模糊推理方式。
(4)选择输出量的解模糊方式。
3.2 模糊PID设计
模糊PID控制的主要任务是找出PID的三个参数与误差e(设实际的误差为e,模糊化后的误差为E)和误差变化 ec(设实际的误差变化为 ec,模糊化后的误差变化为EC)之间的模糊关系,在运行中不断检测e和ec,根据确定的模糊控制规则来对三个参数进行在线调整。
根据工程中调节PID参数的经验,可以得出如下的模糊PID参数调整原则:①误差E较大时,为加快系统响应速度,应取较大的Kp(Kp为去模糊化前的比例系数);同时,为避免由于开始时e的瞬时变大可能出现的微分过饱和而使控制作用超出许可范围,应取较小的 Kd(Kd为去模糊化前的微分系数);为防止出现较大超调,产生积分饱和,应对积分加以限制,取Ki(Ki为去模糊化前的积分系数)为零。②|E|和|EC|处于中等大小时,为使系统具有较小的超调,Kp应取小一些,Ki取值要适当,Kd要大小适中,以保证系统响应速度。③当|E|较小,即接近设定值时,为使系统有良好的稳态性能,应增加Kp、Ki取值;同时,为避免系统在设定值附近出现振荡,并考虑系统抗干扰性能,当|E|较大时,Kd可取小一些;|EC|较小时,Kd取大一些。
选择误差e和误差变化ec作为输入语言变量,对这两个变量均取{NB,NM,NS,O,PS,PM,PB}七个模糊值,则根据上述调整原则,可以建立相应的模糊规则。表1、表2和表3分别给出了比例系数的变化量Δkp、积分系数的变化量Δki和微分系数的变化量Δkd的模糊规则表。

表1 Δkp的模糊规则表Tab.1 Fuzzy rule table of Δkp

表2 Δki的模糊规则表Tab.2 Fuzzy rule table of Δki

表3 Δkd的模糊规则表Tab.3 Fuzzy rule table of Δkd
根据模糊规则表,可以对去模糊化后的比例系数kp、去模糊化后的积分系数ki和去模糊化后的微分系数kd进行动态整定:设 kp′、 ki′、dk′为采用常规整定方法得到的 PID参数值(是一个固定值),选择适当的模糊化和去模糊化方法,则模糊PID参数为:kp= kp′+Δkp,ki=ki′+Δki,kd=dk′+Δkd。
在模糊 PID控制中,误差的比例因子 AE、误差变化的比例因子 AEC、比例系数的比例因子AKP、积分系数的比例因子AKI和微分系数的比例因子 AKD的选取对模糊控制系统的动静态性能有较大影响。因此,需要不断实验,对比实验结果,以获得最优的比例因子。
4 阵列式电磁-永磁混合悬浮系统的四单元式三维运动模糊PID控制方法
阵列式电磁-永磁混合悬浮系统的底部是由共3×3的方形单元电磁铁(记为 1~9号电磁铁)组成的电磁铁阵,分为一号、二号、三号、四号四个区间,阵列式电磁-永磁混合悬浮系统的四单元式电磁铁布局图如图5所示。

图5 四单元式电磁铁布局图(俯视图)Fig.5 Four-cell-type solenoid layout (top view)
当悬浮物体在某区间运动时,只有属于该区间的四个电磁铁是工作的;10号电磁铁代表控制x方向的侧向电磁铁,11号电磁铁代表控制z方向的侧向电磁铁。其中,1~9号电磁铁不需要进行反向控制,10号和11号电磁铁需要进行反向控制。
侧面的10号和11号电磁铁在整个控制过程中一直处于工作状态,而1~9号电磁铁的开通与关断则由悬浮物体的水平(x、z)位置来决定:假设阵列式电磁铁所处的位置坐标如图5所示,3×3的阵列式电磁铁占用了1000 mm×1000 mm的场地,则电磁铁区间选择流程图如图6所示。
垂直方向y的控制方式如下:首先,根据y方向的实际位置和设定位置,运用模糊PID控制方法计算出y方向所需要输出的控制信号的大小;然后,根据悬浮物体x、z的位置,决定打开哪几个电磁铁;最后,给相应的电磁铁通y方向控制信号所对应的电流,其他电磁铁不输出电流。
水平方向x(z)的控制方式如下:首先,根据x(z)方向的实际位置和设定位置,运用模糊 PID控制方法计算出x(z)方向所需要输出的控制信号的大小;然后,给11(10)号通x(z)方向控制信号所对应的电流。
阵列式电磁-永磁混合悬浮系统的四单元式模糊PID控制流程图如图7所示。

图6 电磁铁区间选择流程图Fig.6 Solenoid interval selection flow chart

图7 四单元式模糊PID控制流程图Fig.7 Four-cell-type fuzzy PID control flow
5 阵列式电磁-永磁混合悬浮系统的九单元式定点悬浮模糊控制方法
九单元式定点悬浮模糊控制方法只采用底部阵列式电磁铁,不需要侧面电磁铁,电磁铁布局图如图8所示。

图8 九单元式电磁铁布局图(俯视图)Fig.8 Nine-cell-type solenoid layout(top view)
由于电磁场的非线性和难于分析性,在悬浮物体上升和下降这两个阶段,要使悬浮物体稳定在某一点所需要的电流具有很大的差异,一般而言,在相同的高度处,下降时需要的电流要比上升时所需要的电流大得多,而且,在大部分高度下,这一差别可以达到十倍之多。因此,鉴于上升和下降阶段的严重不对称性,如果采用常规的PID方式进行控制显然是行不通的;而如果能够摸索出对应于不同高度时,九个电磁铁分别所需要的电流,并对这个经验库不断进行修正,则可以仅采用底面阵列式很好的实现定点悬浮。
阵列式电磁-永磁混合悬浮系统的九单元式定点悬浮模糊控制思想如图9所示。
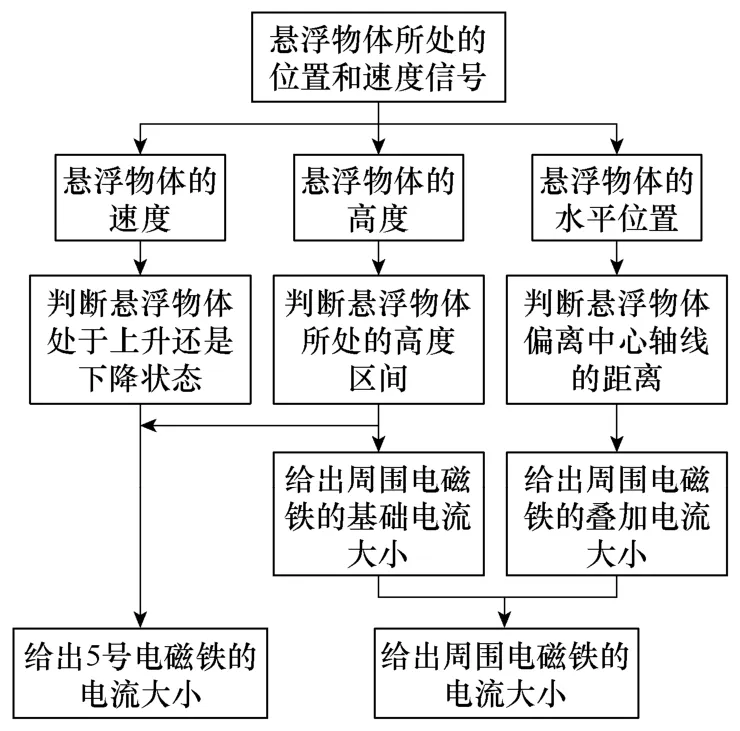
图9 九单元式定点悬浮模糊控制思想Fig.9 Fuzzy control theory for fix-point suspension of nine-cell-type electromagnet array
6 实验结果
由于实际测试时硬件的原因,四单元式的三维运动控制没有进行实验测试,只对采用阵列式电磁—永磁混合悬浮系统的九单元式定点悬浮模糊控制方法进行了相应的实验测试。
在期望悬浮高度为400 mm(即y轴的目标位置为400 mm),期望水平位置为(1150 mm,1150 mm)(即x轴、z轴的目标位置均为1150 mm)的情况下,采用九单元式定点悬浮模糊控制方法所得到的控制效果如图10、图11和图12所示。图10给出了x轴的控制效果图,悬浮物体在x轴的运动曲线基本稳定在1150 mm处;图12给出了z轴的控制效果图,悬浮物体在 z轴的运动曲线基本稳定在 1150 mm处;图11给出了y轴的控制效果图,悬浮物体在y轴的运动曲线在400 mm上下小幅振荡。

图10 x轴的控制效果图Fig.10 Control effect drawing of x-axis

图11 y轴(垂直方向)的控制效果图Fig.11 Control effect drawing of y-axis(vertial direction)
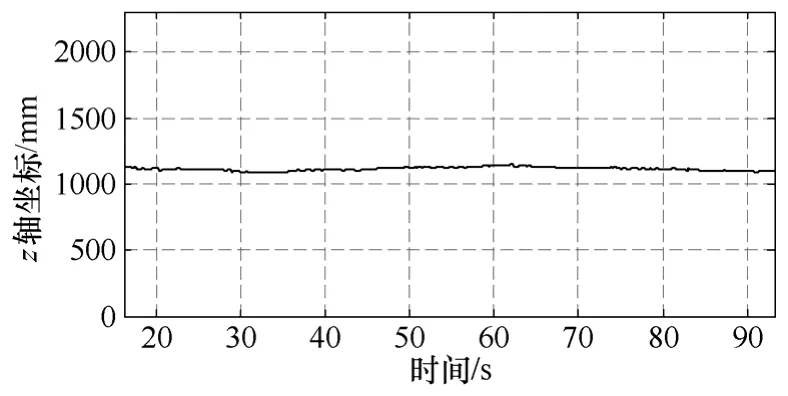
图12 z轴的控制效果图Fig.12 Control effect drawing of z-axis
从图中可以发现:利用九单元式定点悬浮模糊控制方法,可以很好的使悬浮物体在水平方向上保持在5号电磁铁的中心周线上,同时,利用模糊经验,垂直方向上也能够在某一较小的区域内上下波动,达到一定范围的稳定。如果继续扩展模糊规则库,我们相信控制效果会更好。
7 结论
针对米级悬浮下的定点悬浮,采用模糊控制的方法进行控制,取得了较好的定点悬浮效果。实验结果表明,通过增加电磁铁的单元数,我们可以实现悬浮物体的三维运动。
由于对象数学模型具有不确定性,因此,采用了模糊控制的控制策略。通过细分高度的方法,探索了大量的模糊控制规则,然而,由于时间比较紧迫、模糊规则的探索比较困难,模糊控制规则的探索还不够深入、模糊规则库的建立还不够完善,而且,与厘米级悬浮相比,米级悬浮下的实验设备的精度并不是很高,磁场、电流等的建立都需要一定的时间,因此,悬浮物体的稳定精度还不很理想。在后面的研究中,会深入摸索模糊规则,努力完善模糊规则库,同时,加入预测控制,努力减小延时,提高系统的精度。
[1]吕梁, 樊树江, 吴峻.中低速磁悬浮列车牵引控制系统的设计[J].电气传动自动化, 2006, 28(4):22-24.Lü Liang, Fan Shujiang, Wu Jun.Low-speed maglev train in the actual traction control system[J].Electricl Drive Automation, 2006,28 (4) : 22-24.
[2]刘德生, 尹力明, 佘龙华.Fuzzy-PID控制算法在磁悬浮系统中的应用[J].计算机测量与控制, 2002,10(6): 375-377.Liu Dengsheng, Yin Liming, She Longhua.Application of fuzzy-PID algorithm in maglev system[J].Computer Measurement & Control , 2002,10(6): 375-377.
[3]徐绍辉, 徐正国, 等.电磁永磁混合悬浮系统的神经元PID控制[J].电力电子技术, 2006, 40(4): 12-13.Xu Shaohui, Xu Zhengguo,et al.PM hybrid electromagnetic suspension system neuron PID control[J].Power Electronics, 2006,40 (4) :12-13.
[4]张秋生, 刘楹, 等.自动滑压控制在协调控制系统中的实现[J].河北电力技术, 2006, 25(4): 14-15.Zhang Qiusheng, Liu Ying, et al.Automatic sliding pressure control in the coordination of the control system implementation[J].Hebei Electric Power, 2006,25(4): 14-15.
[5]Liu Sheng, Li Yanyan.Application of a compound controller based on fuzzy control and support vector machine to ship's boiler-turbine coordinated control system[J].J.Marine.Sci.Appl , 2009(8): 33-39.
[6]王莉, 熊剑, 张昆仑, 等.永磁和电磁构成的混合式悬浮系统研究[J].铁道学报, 2005(3): 50-54.Wang Li, Xiong Jian, Zhang Kunlun, et al.Constitute a permanent magnet and hybrid electromagnetic suspension system[J].Joaranl of the China Railway Society, 2005 (3): 50-54.
[7]徐绍辉, 徐正国, 金能强, 等.电磁永磁混合悬浮系统的建模仿真与实验[J].辽宁工程技术大学学报,2006, 25(4):553-555.Xu Shaohui, Xu Zhengguo, Jin Nengqiang,et al.Modeling simulation and experiments for the hybrid maglev system[J].Journal of Liaoning Technical University, 2006,25(4): 553-555.
[8]李云钢, 程虎, 张鼎.EMS型电磁永磁混合悬浮控制问题[C].第24届中国控制会议, 2005: 15-18.
[9]常蕾, 游小杰, 杨中平.电磁永磁混合悬浮系统的滑模控制器设计[J].微计算机信息, 2009, 25(4): 24-26.Chang Lei, You Xiaojie, Yang Zhongping.The design of sliding mode controllor of hybrid magnetic levitation systems[J].Control & Automation, 2009,25(4): 24-26.
[10]张博, 骆力, 黄爱民.中低速磁悬浮列车电制动系统的仿真[J].计算机仿真, 2006, 23(5): 238-241.Zhang Bo, Luo Li, Huang Aimin.Low-speed maglev train braking system simulation[J].Computer Simulation,2006, 23 (5) :238-241.
[11]朱顺利, 吴莉, 李明.基于模糊控制的磁悬浮系统及其仿真[J].兵工自动化, 2007, 26(10): 24-26.Zhu Shunli, Wu Li, Li Ming.Maglev system and simulation based on fuzzy control[J].Ordnance Industry Automation, 2007, 26(10): 24-26.
[12]张静, 徐林.磁悬浮系统的模糊自适应PID控制[J].计算机应用, 2009, 29(z1): 329-334.Zhang Jing, Xu Lin.Fuzzy adaptive PID control in magnetic levitation system[J].Journal of Computer Applications, 29(z1): 329-334.
[13]赵宇, 尹力明, 赵志苏.基于工控机的常导中低速磁悬浮列车机械制动控制系统[J].电气传动, 2006,36(4): 47-49.Zhao Yu, Yin Liming, Zhao Zhisu.IPC-based lowspeed maglev train in the normal conducting mechanical brake control system[J].Electric Drive, 2006,36(4): 47-49.
[14]徐家镇, 徐洪泽.磁悬浮列车运行控制系统仿真环境研究[J].微型机与应用, 2005(12): 44-46.Xu Jiazhen, Xu Hongze.Simulation of the environment of maglev train control system[J].Microcomputer & Its Applications, 2005(12): 44-46.
[15]李贞融.电磁感应与磁悬浮力实验的设计[J].物理实验, 2008, 28(6):34-37 Li Zhenrong.Experimental design of electromagnetic induction and magnetic suspension[J].Physics Experimentation, 2008, 28(6):34-37
[16]仉毅.Halbach磁阵列在微细加工平台中的应用研究[J].机床与液压, 2008, 36(4): 29-31.Zhang Yi.Application and research of halbach magnetic array in the minuteness machining stage[J].Machine Tool& Hydraulics, 2008, 36(4): 29-31.
猜你喜欢
小猕猴智力画刊(2022年10期)2022-11-02
厦门大学学报(自然科学版)(2022年4期)2022-07-15
建材发展导向(2021年13期)2021-07-28
防爆电机(2021年2期)2021-06-09
现代装饰(2020年7期)2020-07-27
中华建设(2019年12期)2019-12-31
运筹与管理(2019年10期)2019-12-17
建材发展导向(2019年10期)2019-08-24
建材发展导向(2019年14期)2019-08-06