
基于主方向迭代校正的铁轨检测算法
2012-01-29 07:56居耀勇
武汉科技大学学报 2012年6期
居耀勇,陈 黎
(武汉科技大学计算机科学与技术学院,湖北武汉,430065)
基于图像传感器技术的铁轨检测[1-3]是利用前端成像设备采集现场视频图像,通过对图像分析处理实现铁轨异常情况的检测。基于先验知识的铁轨检测算法[4]是通过人工标定铁轨位置,获取铁轨边缘特征信息,并利用最小二乘法拟合建立铁轨模板。局部线型检测算子(LLPD)[5]运用货运编组站铁轨自动检测与Hough变换结合的思想,形成断线相连、区域生长的方式进行铁轨检测。此外,通过Canny边缘检测获取铁轨像素点的候选集,根据候选集的空间分布特性或近邻关系,采取从左至右、从下至上的像素搜索方法来检测铁轨[6]。另一种算法是利用Canny边缘检测算子获取铁轨的边缘特征,通过概率Hough变换检测出直线,最终实现铁轨的检测[7]。
本文基于图像中铁轨线长而连续以及因摩擦产生的高亮与紧邻的暗影区域形成强烈的灰度差考虑,运用快速图像处理算法实现铁轨的主方向预测,利用基于主方向的边缘检测算子迭代校正铁轨主方向,从而实现主方向为导向的铁轨检测算法。
1 算法设计
1.1 算法描述
基于主方向迭代的铁轨检测算法按主方向定位与铁轨定位两步实现。本文利用最优边缘检测算子提取铁轨边缘特征,基于边缘特征信息进行直线检测,再根据设定的准则进行铁轨的定位。算法流程图如图1所示。
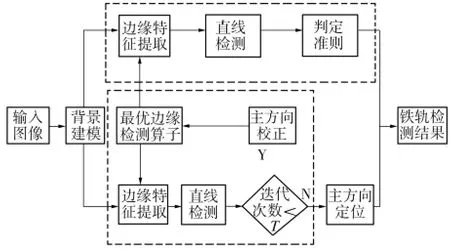
图1 算法流程图Fig.1 Flow chart of the algorithm
1.2 铁轨主方向提取
1.2.1 背景建模
室外环境下的铁轨因成像条件不受控,白天逆光下,图像出现光斑、眩光等现象,夜间照度不足时,图像对比度低、清晰度差,视频图像中出现运动目标(如行人),对铁轨的检测产生强烈的干扰。为减少上述干扰获得稳定的背景图像,需要对输入的视频图像背景建模。高斯混合模型[8]作为经典的背景模型,能很好地解决复杂背景下光照变换、物体缓慢运动、突然进入或移除等对背景模型的影响。为增强算法的鲁棒性,本文采用通用的快速高斯混合模型进行背景建模。
1.2.2 边缘特征提取
铁轨的图像特征直观表现为连续不间断的直线或曲线,并且由于经常摩擦呈现高亮与邻近的暗影背景形成灰度差,这种阶跃变化适合采用基于边缘检测[9]的分割技术。考虑到算法在分析铁轨图像开始时不具有边缘方向的先验知识,算法采用Sobel算子进行粗检测,对各像素分别进行水平、垂直方向的梯度运算,综合这两个方向的梯度幅值得到该像素点边缘响应估值。
1.2.3 铁轨主方向预测
在梯度图像中,铁轨所在位置处产生了较大的直线状边缘响应,并且该直线与铁轨的延伸方向一致。准确检测出该条直线,即可确定铁轨的主方向,判定出铁轨的位置。基于图像频域与空域相结合的Hough直线检测算法[10-13]步骤为,先通过小波变换进行图像二值化处理,然后利用Hough变换进行直线检测。考虑到铁轨所具有的特殊边缘特征,本文直接利用图像的梯度信息进行直线检测,通过检测Hough空间中累加器元素的最大值,确定与铁轨主方向所在直线相对应的参数。
1.3 基于主方向的最优梯度算子
由于铁轨的方向具有随机性,本文依据二维高斯函数特性构造出基于铁轨主方向的最优边缘检测算子。二维高斯函数的表达式为

设主方向为x轴正向,该方向上的一阶导数为

经仿射变换

得到

式中:σ为二维高斯函数宽度;θ为主方向与x轴正向夹角。
对连续函数离散化,确定高斯函数的参数σ。对σ和θ分别取不同值,得高斯滤波函数图像如图2所示。从图2中函数俯视图可看出,当方向梯度旋转θ时,高斯函数能量分布图也作出了相应的旋转变换。
本文基于梯度下降法取不同的σ值,利用样本图像进行训练,经过统计分析得到最佳σ值为0.5。对于L×L的方向梯度模板,与分辨率为M×N的图像进行卷积运算的时间复杂度为O(MNL2)。分析可知,方向梯度模板尺寸越大,处理速度越慢。为得到各方向的梯度算子,算法采用7×7的高斯梯度模板。为统一度量单位,对梯度模板作归一化处理,归一化准则为
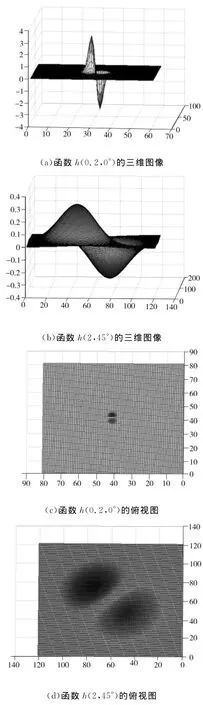
图2 二维高斯滤波函数图像Fig.2 2-D Gauss filter function

离散化后的最优梯度算子如图3所示。图3结果表明,h′(0.5,30°)经30°旋转变换后得到方向h′(0.5,60°)的最优梯度算子,不仅如此,通过该算法还可以灵活得到任意方向的梯度算子。
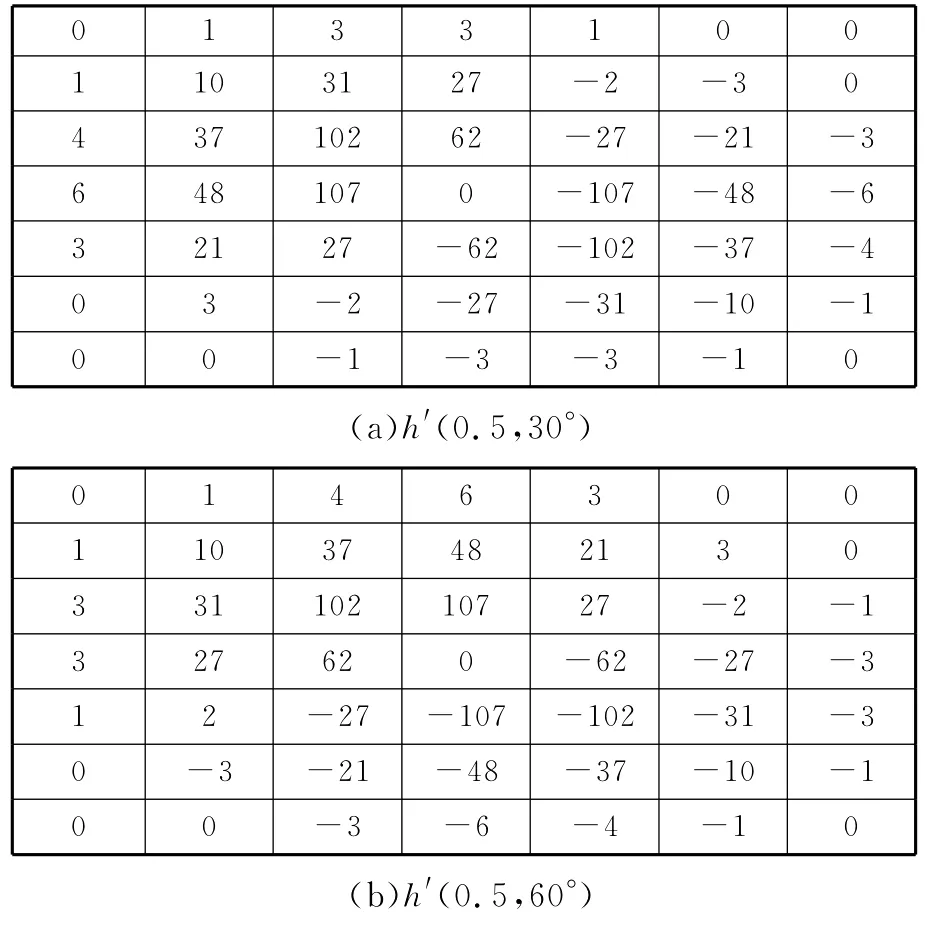
图3 离散化后的最优梯度算子Fig.3 Optimal gradient operator after discretization
1.4 算法迭代与铁轨定位
运用上述算法进行铁轨主方向的迭代校正,当迭代次数超过设定的阈值r时,利用直线检测法获取主方向信息。测试发现,当r=2时便能得到准确的路轨主方向信息。考虑到图像中一般存在多条铁轨,并且这些铁轨与主方向平行,本文利用已有的铁轨主方向信息,采用基于主方向的Hough变换方法进行铁轨定位。图像中铁轨所在位置的像素灰度值较一致,并且各铁轨之间的灰度也呈现出一定的相似性。通过基于梯度图像的Hough变换检测出直线后,根据直线内灰度方差最小特征选取直线,最后通过直线连接的方法进行铁轨的准确定位。
2 结果与分析
运用上述算法,在硬件配置为Intel CPU、主频1.66 GHz、内存1 GB、Windows XP操作系统、Matlab 7.6的条件下进行测试。测试图像由两类组成:一类为利用成像设备所采集的铁路模型图像;一类来自互联网的铁轨视频图像。从每类图像中分别选取180幅图像作为样本进行测试和实验,样本测试结果如表1所示,实验结果如图4、图5所示。
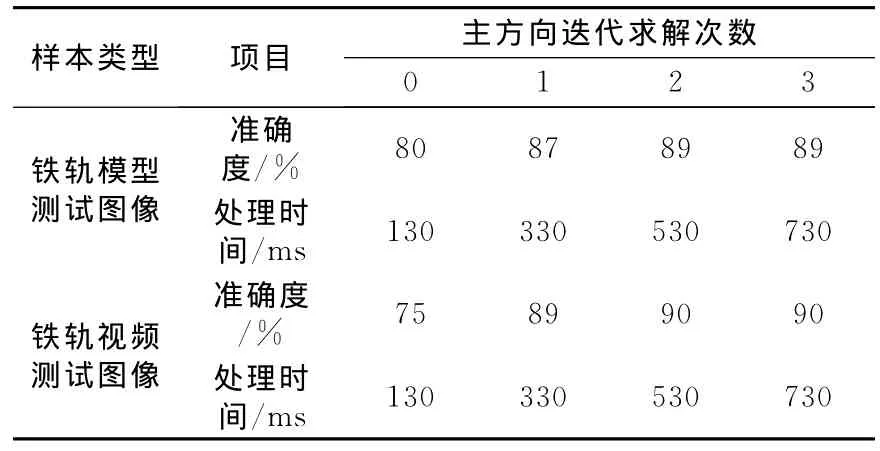
表1 样本测试结果Table 1 Test results of the samples

图4 铁轨模型图像Fig.4 Video images of railway track model
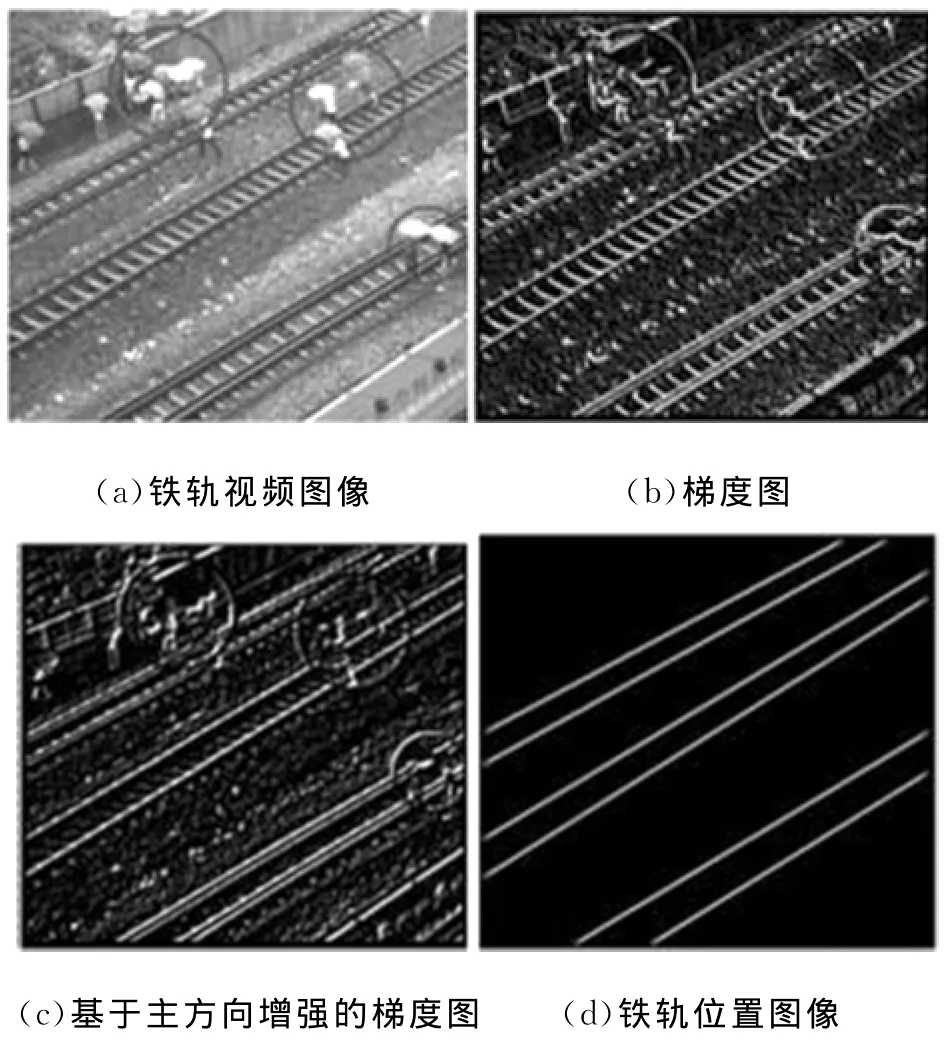
图5 铁轨视频图像Fig.5 Video images of railway track
从表1中可看出,进行主方向迭代求解后,准确度得到大幅提升。由图4中可看出,沿铁轨主方向的边缘信息得到增强,并抑制了枕木所造成的边缘信息干扰。图5中,由于现场铁轨图像存在行人等运动目标,在进行高斯背景建模后用红色圆圈对行人做出标示(图5(a)),对于多条铁轨图像,当迭代次数达到一定数量(2次)后,准确度范围得到有效收敛。可见,算法对图像中的铁轨实现了准确的检测与定位。
3 结语
利用铁轨主方向信息进行迭代求解,解决了复杂环境下多条铁轨的检测与识别问题。采用基于梯度图像的Hough变换算法进行直线检测,估计出铁轨的主方向。通过设计基于铁轨主方向的最优梯度算子突出铁轨所在位置的边缘响应,并进行算法迭代校正所估计的铁轨主方向,最终实现铁轨的检测与定位。实验证明了该算法的有效性和准确性。
[1] Kaleli F,Akgul Y S.Vision-based railroad track extraction using dynamic programming[C]//Proceedings of the 12th IEEE International Conference on Intelligent Transportation Systems.St.Louis,MO:IEEE Conference Publications,2009:1-6.
[2] Singh M,Singh S,Jaiswal J,et al.Autonomous rail track inspection using vision based system[C]//Proceedings of IEEE International Conference on Computational Intelligence for Homeland Security and Personal Safety.Alexandria,VA:IEEE Conference Publications,2006:56-59.
[3] Oh S,Park S,Joung E.Approaches for connection of vision based monitoring system with railway signal system for train emergency stop[C]//Proceedings of the IEEE International Conference on Information and Multimedia Technology.Jeju Island:IEEE Conference Publications,2009:59-63.
[4] 任重.基于先验知识的铁轨识别[D].武汉:武汉理工大学,2007.
[5] 关鹏,顾晓东,张立明.一种基于图像处理的铁轨自动检测方法[J].计算机工程,2007,19(33):207-212.
[6] 宋娟.路轨自动检测系统及障碍物识别技术的研究[D].杭州:浙江大学,2008.
[7] Li Qinfeng,Shi Jifang,Li Chen.Fast line detection method for railroad switch machine monitoring system[C]//Proceedings of the IEEE International Conference on Image Analysis and Signal Processing.Taizhou,China:IEEE Conference Publications,2009:61-64.
[8] Stauffer C,Grimson W E L.Adaptive background mixture models for real-time tracking[C]//Proceedings of the IEEE International Conference on Computer Vision and Pattern Recognition.Fort Collins,CO:IEEE Conference Publications,1999:1-7.
[9] Kurt B,Gokmen M.Goal oriented edge detection[C]//Proceedings of the IEEE International Conference on Signal Processing,Communication and Applications.Aydin:IEEE Conference Publications,2008:1-4.
[10]Saffan M I,Oktem R.A fast hough transform approximation and its application for barcode localization[C]//Proceedings of the IEEE International Conference on Signal Processing and Communications Applications.Eskisehir:IEEE Conference Publications,2007:1-4.
[11]Mastorakis G,Davies E R.Improved line detection algorithm for locating road lane markings[J].Electronics Letters,2011,3(47):183-184.
[12]N Aggarwal,W C Karl.Line detection in images through regularized hough transform[J].IEEE Transactions on Image Process,2006,3(15):382-591.
[13]Zhao Xiaochuan,Liu Peizhi,Zhang Min,et al.A novel line detection algorithm in images based on improved hough transform and wavelet lifting transform[C]//Proceedings of the IEEE International Conference on Information Theory and Information Security.Beijing,China:IEEE Conference Publications,2010:767-771.
猜你喜欢
数学物理学报(2022年5期)2022-10-09
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年1期)2021-03-29
应用数学(2020年2期)2020-06-24
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
英语文摘(2019年1期)2019-03-21
小学阅读指南·低年级版(2017年1期)2017-03-13
电影故事(2015年16期)2015-07-14
